(Л
bo
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват для деревянных бочек к погрузчику | 1983 |
|
SU1224255A1 |
| Грузозахватное устройство для бочек к погрузчику | 1987 |
|
SU1493609A1 |
| Захват для деревянных бочек к погрузчику | 1981 |
|
SU983029A1 |
| Захват для деревянных бочек к погрузчику | 1988 |
|
SU1548155A1 |
| Контейнер для бочек | 1979 |
|
SU889556A1 |
| Устройство для перегрузки бочек | 1978 |
|
SU716969A1 |
| Захватное устройство для бочек с уторами | 1986 |
|
SU1386547A1 |
| Сменное грузозахватное приспособление к вилочному погрузчику | 1982 |
|
SU1068382A1 |
| Навесное грузозахватное устройство погрузчика для транспортировки рулонных материалов | 1981 |
|
SU1028595A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО К ПОГРУЗЧИКУ | 1991 |
|
RU2029728C1 |
Изобретение относится к грузовым захватам и может быть использовано для механизированной перегрузки бочек с криволинейными образующими. Цель изобретения - повьшенне производительности и расширение функциональных возможностей. Грузозахватное устройство к погрузчику 1 содержит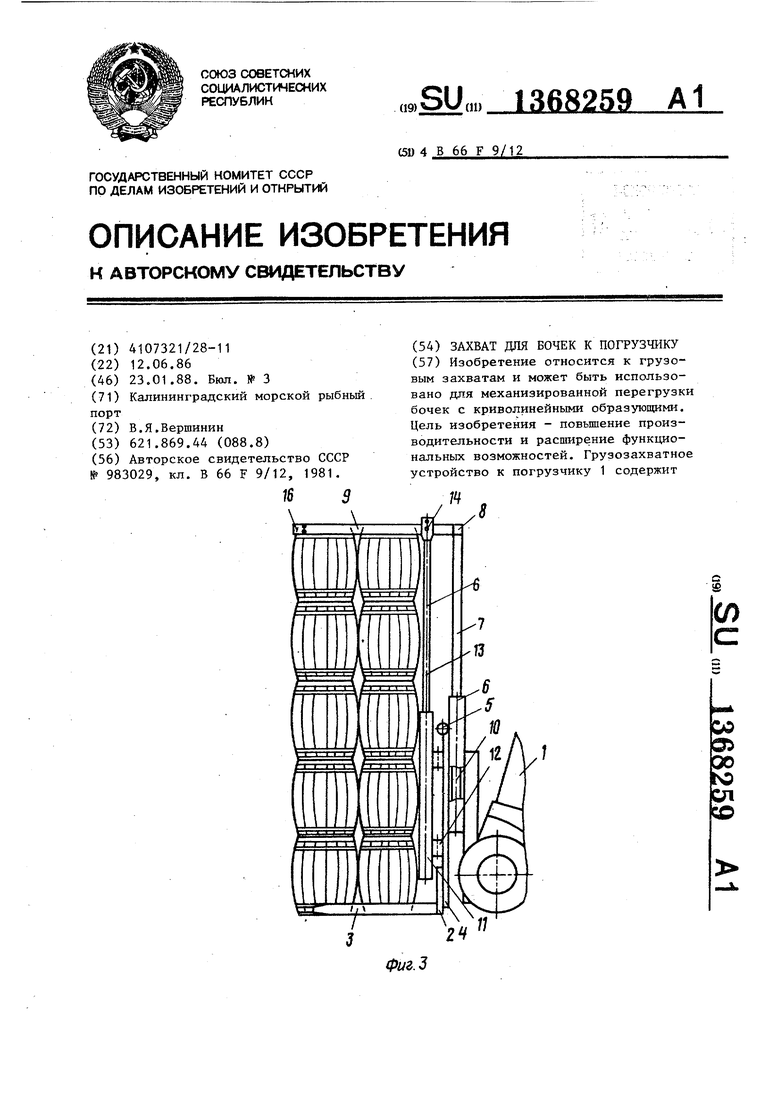
Фиг.З
нижнкяо траверсу 2 с горизонтальным рядом вил 3, установленную на каретке 4 с возможностью поперечного перемещения от привода 5. На каретке 4 установлены вертикальные телескопические направляющие 6, на вьщвиж- ных частях 7 которьп5 смонтирована верхняя траверса 8 с горизонтальным рядом дополнительных вил 9, перемещающаяся в вертикальном направлении с помощью привода 10. На каретке 4 установлен ста лкиватель 11 с возможностью перемещения вдоль вил 3 и 9 с помощью привода 12. Сталки- ватель 11 снабжен телескопической выдвиркной рамой 13. На свободных ко
1
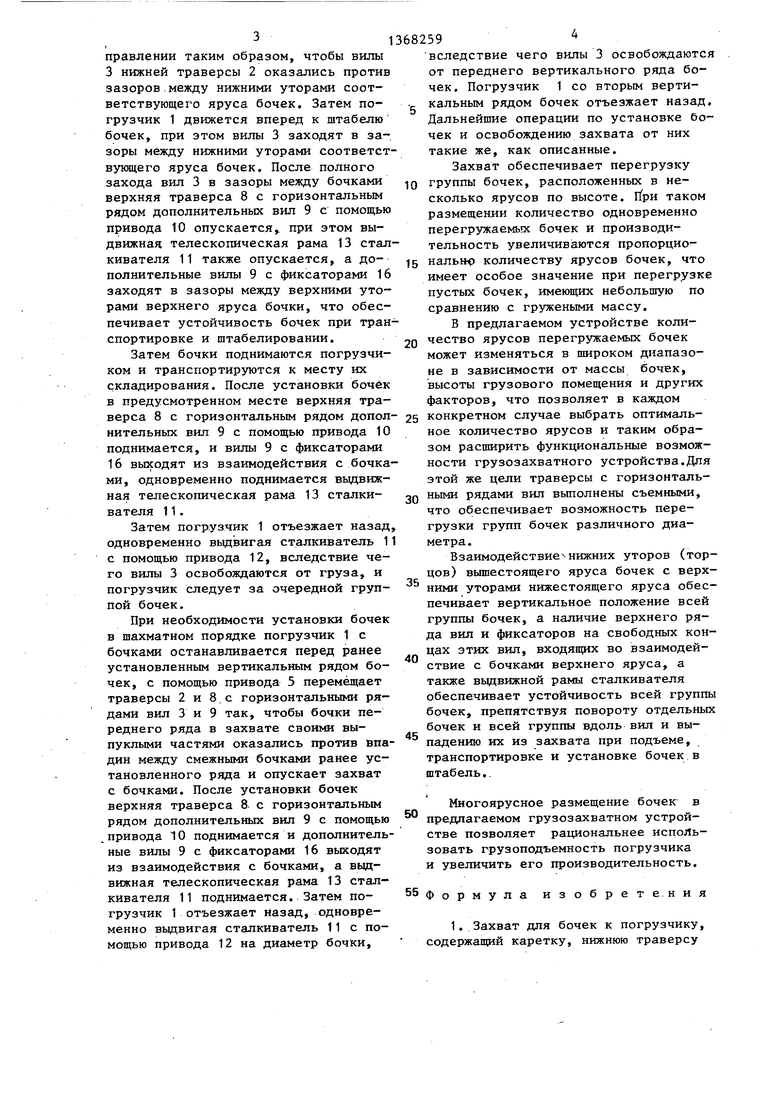
Изобретение относится к поДъемно- транспортному оборудованию и может быть использовано как навесное грузо- захйатное устройство к погрузчику для механизированной перегрузки, преимущественно пустых бочек с криволинейными образующими.
Цель изобретения - повьппение производительности и расширение функциональных возможностей.
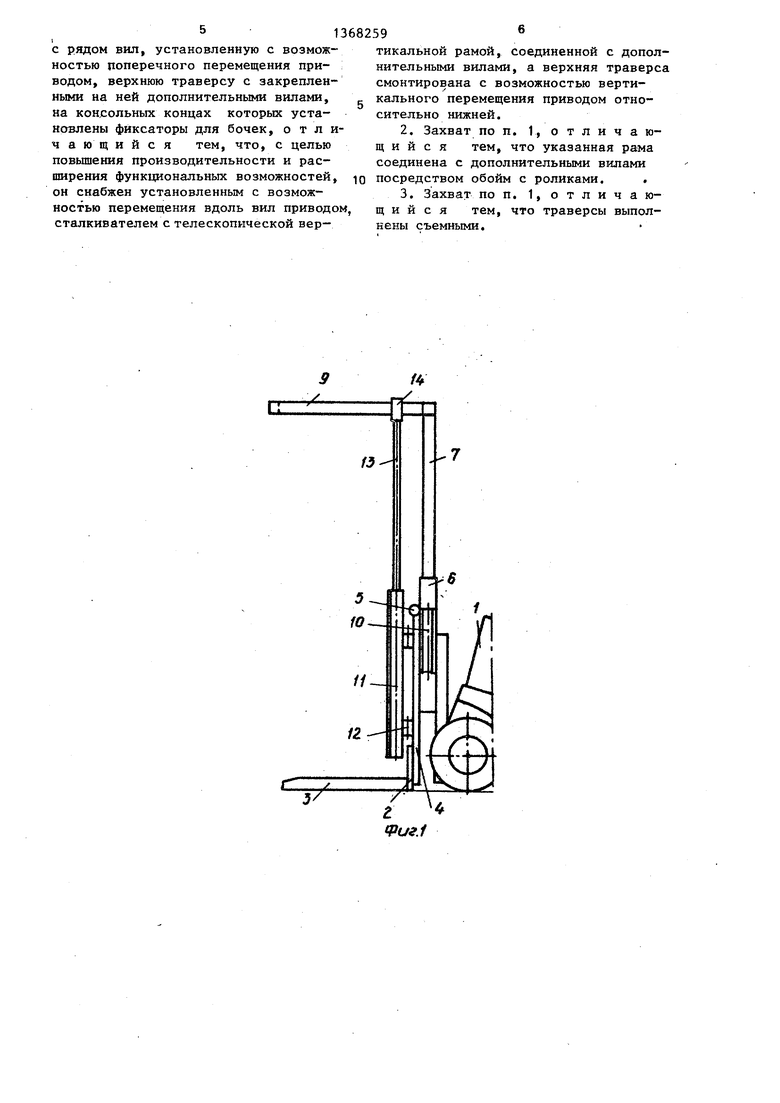
На фиг. I приведен захват для бочек к погрузчику, вид сбоку; на фиг. 2 - то же, вид спереди; на фиг. 3 - то же с бочками, вид сбоку на фиг. 4 - то же с бочками, вид сверху.
Захват для бочек к погрузчику 1 содержит нижнюю траверсу 2 с горизонтальным нижним рядом вил 3, установленную на каретке 4 с возможностью поперечного перемещения с помощью привода 5. На каретке 4 установлены вертикальные телескопические направляющие 6, на вьщвижных частях 7 которых смонтирована верхняя траверса 8 с горизонтальным рядом дополнительных вил 9, перемещакнцаяся в вертикальном направлении с помощью привода 10. На каретке 4 установлен стал- киватель 11 с возможностью перемещения вдоль рядов вил 3 и 9 с помощью привода 12. Сталкиватель 11 снабжен телескопической вьщвижной рамой 13,
68259
цах вил 9 установлены фиксаторы 16. Траверсы 2 и 8 с горизонтальными рядами вил .выполнены съемными. При перегрузке группы бочек, установленных в несколько ярусов, вилы 3 нижней траверсы 2 заводятся в зазоры между нижними уторами нижнего яруса бочек, а дополнительные вилы 9 верхней траверсы 8 с фиксаторами 16 опускаются в зазоры между верхними уторами верхнего яруса бочек. Взаимодействие бочек с злементами конструкции грузозахватного устройства обеспечивает устойчивость группы бочек при транспортировке и штабелировании. 2 з.п. ф-лы, 4 ил.
на которой установлены обоймы 14 с роликами 15, с помощью которых выдвижная рама 13 сталкивателя 11 соединена с верхним рядом дополнительных вил 9. На свободных концах дополнительных вил 9 установлены фиксаторы 16.
Нижняя траверса 2 с горизонтальным рядом вил 3 выполнена съемной и
крепится к каретке 4, например, с помощью болтовых соединений. Верхняя траверса 8 с горизонтальным рядом дополнительных вил 9 также выполнена съемной и крепится к вцдвижной части
7 вертикальных телескопических направляющих 6, например, с помощью болтовых соединений.
Захват для бочек к погрузчику ра ботает следующим образом.
Погрузчик 1 подъезжаеФ перпендикулярно к штабелю бочек, установленных в несколько ярусов. Верхняя траверса 8 с горизонтальным рядом дополнительных вил 9 к фиксаторами 16 с
помощью привода 10 поднимается в верхнее положение. При зтом поднимается и вьщвижная телескопическая рама 13 сталкивателя 11, соединенная с дополнительными вилами 9 посредством
обойм 14 с роликом 15.
Затем, нижняя траверса 2, а вместе с ней и верхняя траверса 8 через посредство связывающих их телескопических направляющих 6 с помощью привода 5 перемещаются в поперечном на 1
правлении таким образом, чтобы вилы 3 нижней траверсы 2 оказались против зазоров.между нижними уторами соответствующего яруса бочек. Затем погрузчик 1 движется вперед к штабелю бочек, при этом вилы 3 заходят в зазоры между нижними уторами соответствующего яруса бочек. После полного захода вил 3 в зазоры между бочками верхняя траверса 8 с горизонтальным рядом дополнительных вил 9 с помощью привода 10 опускается,, при этом выдвижная телескопическая рама 13 стал- кивателя 11 также опускается, а дополнительные вилы 9 с фиксаторами 16 заходят в зазоры между верхними уторами верхнего яруса бочки, что обеспечивает устойчивость бочек при транспортировке и штабелировании.
Затем бочки поднимаются погрузчиком и транспортируются к месту их складирования. После установки бочек в предусмотренном месте верхняя траверса 8 с горизонтальным рядом дополнительных вил 9 с помощью привода 10 поднимается, и вилы 9 с фиксаторами 16 выходят из взаимодействия с бочками, одновременно поднимается выдвижная телескопическая рама 13 сталки- вателя 11.
Затем погрузчик 1 отъезжает назад, одновременно выдзвнгая сталкиватель 11 с помощью привода 12, вследствие чего вилы 3 освобождаются от груза, и погрузчик следует за очередной группой бочек.
При необходимости установки бочек в шахматном порядке погрузчик 1 с бочками останавливается перед ранее установленным вертикальным рядом бочек, с помощью привода 5 перемещает траверсы 2 и 8,с горизонтальными ряами вил 3 и 9 так, чтобы бочки переднего ряда в захвате своими выпуклыми частями оказались против впаин между смежными бочками ранее установленного ряда и опускает захват с бочками. После установки бочек верхняя траверса 8 с горизонтальным рядом дополнительных вил 9 с помощью ривода 10 поднимается и дополнительные вилы 9 с фиксаторами 16 выходят з взаимодействия с бочками, а выдижная телескопическая рама 13 стал- ивателя 11 поднимается. Затем погрузчик 1 отъезжает назад, одновреенно вьщвигая сталкиватель 11 с поощью привода 12 на диаметр бочки.
68259
вследствие чего вилы 3 освобождаются от переднего вертикального ряда бочек. Погрузчик 1 со вторым верти- f. кальным рядом бочек отъезжает назад. Дальнейшие операции по установке бочек и освобождению захвата от них такие же, как описанные.
Захват обеспечивает перегрузку 10 группы бочек, расположенных в несколько ярусов по высоте. 1/ри таком размещении количество одновременно перегр5 жаемь х бочек и производительность увеличиваются пропорцио- 15 количеству ярусов бочек, что имеет особое значение при перегрузке пустых бочек, имеющих небольшую по сравнению с гружеными массу.
В предлагаемом устройстве коли- 20 чество ярусов перегружаемых бочек может изменяться в широком диапазоне в зависимости от массы бочек, высоты грузового помещения и других факторов, что позволяет в каждом 25 конкретном случае выбрать оптимальное количество ярусов и таким образом расширить функциональные возможности грузозахватного устройства.Для этой же цели траверсы с горизонталь- од ными рядами вил выполнены съемными, что обеспечивает возможность перегрузки групп бочек различного диаметра.
Взаимодействие нижних уторов (торцов) вышестоящего яруса бочек с верхними уторами нижестоящего яруса обеспечивает вертикальное положение всей группы бочек, а наличие верхнего ряда вил и фиксаторов на свободных концах этих вил, входящих во взаимодействие с бочками верхнего яруса, а также вьщвижной рамы сталкивателя обеспечивает устойчивость всей группы бочек, препятствуя повороту отдельных бочек и всей группы вдоль вил и выпадению их из захвата при подъеме, транспортировке и установке бочек в штабель..
Многоярусное размещение бочек в предпагаемом грузозахватном устройстве позволяет рациональнее исцоль- зовать грузоподъемность погрузчика и увеличить его производительность.
Формула изобрете.ния
35
0
5
с рядом вил, установленную с возможностью поперечного перемещения приводом, верхнюю траверсу с закрепленными на ней дополнительными вилами, на кoнJCoльныx концах которых установлены фиксаторы для бочек, отличающийся тем, что, с целью повышения производительности и расширения функциональных возможностей, он снабжен установленным с возможностью перемещения вдоль вил приводом сталкивателем с телескопической вертикальной рамой, соединенной с дополнительными вилами, а верхняя траверса смонтирована с возможностью вертикального перемещения приводом относительно нижней.
| Захват для деревянных бочек к погрузчику | 1981 |
|
SU983029A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
