(54) МАГНИТОЗЛЕКТРИЧЕСКИР ПРЕОБРАЗОВАТЕЛЬ
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитоэлектрический преобразователь | 1979 |
|
SU836733A1 |
| Магнитоэлектрический преобразователь | 1979 |
|
SU836732A1 |
| Поворотный трансформаторный преобразователь | 1979 |
|
SU855751A1 |
| Магнитоэлектрический преобразователь | 1980 |
|
SU970730A1 |
| ТРАНСФОРМАТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 1994 |
|
RU2077107C1 |
| Магнитоэлектрический преобразователь | 1978 |
|
SU775832A1 |
| Магнитоэлектрический преобразователь | 1977 |
|
SU698675A1 |
| Магнитоэлектрический преобразователь | 1977 |
|
SU764151A1 |
| Магнитоэлектрическое поворотное устройство | 1983 |
|
SU1124409A1 |
| Магнитоэлектрический преобразователь | 1978 |
|
SU694952A1 |
. . -1 . . Изобретение относится к преобразо телям, преобразующим электрический сигнал в перемещение якоря и имеющим одно или два устойчивых п.оложения якоря, в частности к преобразо вателям с начальным и возвратнопоступательным движением якоря. Известен ряд приводов возвратно поступательного движения, в которых точность хода обеспечивается за счет применения механических ограничителей движения якоря. Например поворотный исполнительный двигатель l1 содержащий обмотку возбуждения, возвратную пружину, цили1адрический сердечник, угол поворота которого ограничивается стопорами.. Однако механические ограничители хода якоря имеют ряд недостатков они подвержены механическому износу, что ограничивает их применение в уст ройствах с большим сроком службы. Кроме того, механические соударения создают шум, что не допустимо в ряде приводов, к которым предъявляются требования по бесшумности работы. Известен преобразователь 2, содержащий поляризованную магнитную систему, поворотный якорь, короткозамкнутую обмотку. Преобразователь не имеет ограничителей хода якоря, угол поворота якоря определяется величиной управляющего сигнала. Поэтому, вследствие инерционности якоря, при отработке угла возникают колебания якоря вблизи устойчивых положений. Для демпфирования движения якоря- слу жит короткозамкнутая обмотка. Одка ко короткозамкнутая обмотка создает противодействие с самого начального момента возникновения управляющего магнитного потока, т.е. она уменьшает скорость нарастания управляющего магнитного потока, увеличивает время срабатывания, снижает максималБную частоту отработки сигнала. Этот недостаток проявляется в случае, когда требуется обработка рабочих углов не на одной фиксированной частоте управляющего сигнала, а во всем диапазоне частот до резонансной частоты якоря.
Целью изобретения является повышение частоты стабильности обработки управляющего сигнала.
Указанная цель достигается тем, что механизм демпфирования движения выполнен в виде двух элементов - постоянного магнита.с целым числом паз полюсов, расположенных rio образздащей цилиндра соосно с осью вращения якоря, и магнитопровода с полюсными наконечниками, один из указаннь х элементов жестко соединен
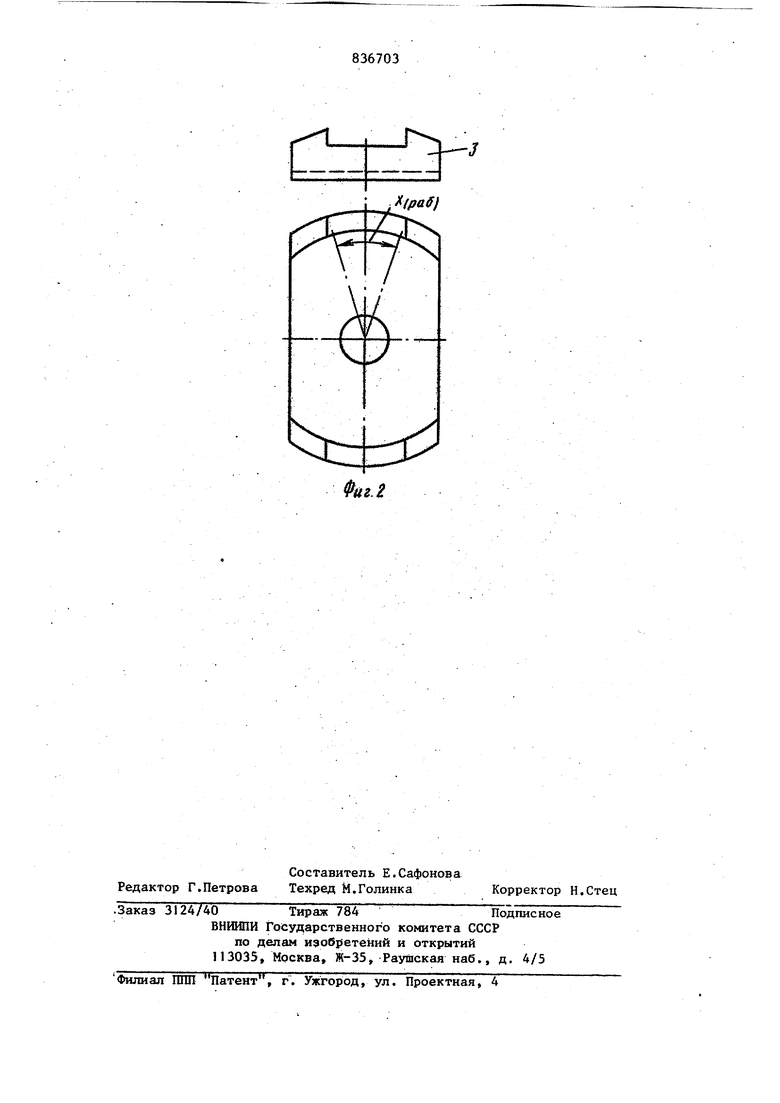
с корпусом, а другой - с якорем магнтоэлектрического преобразователем таким образом, ЧТО в зоне , сопряжения их полюсных элементов образуется рабочий зазор, при этом ширина каждого полюса магнита меньше ширины соответствующего ему полюсного наконечника магнитопровода. В центральной части полюсных наконечников магнитопровода выполнены прямоугольные пазы, а их края профилированы для обеспечения возможности изменения проводимости потоку постоянного магнита, требуемого по условиям демпфирования.
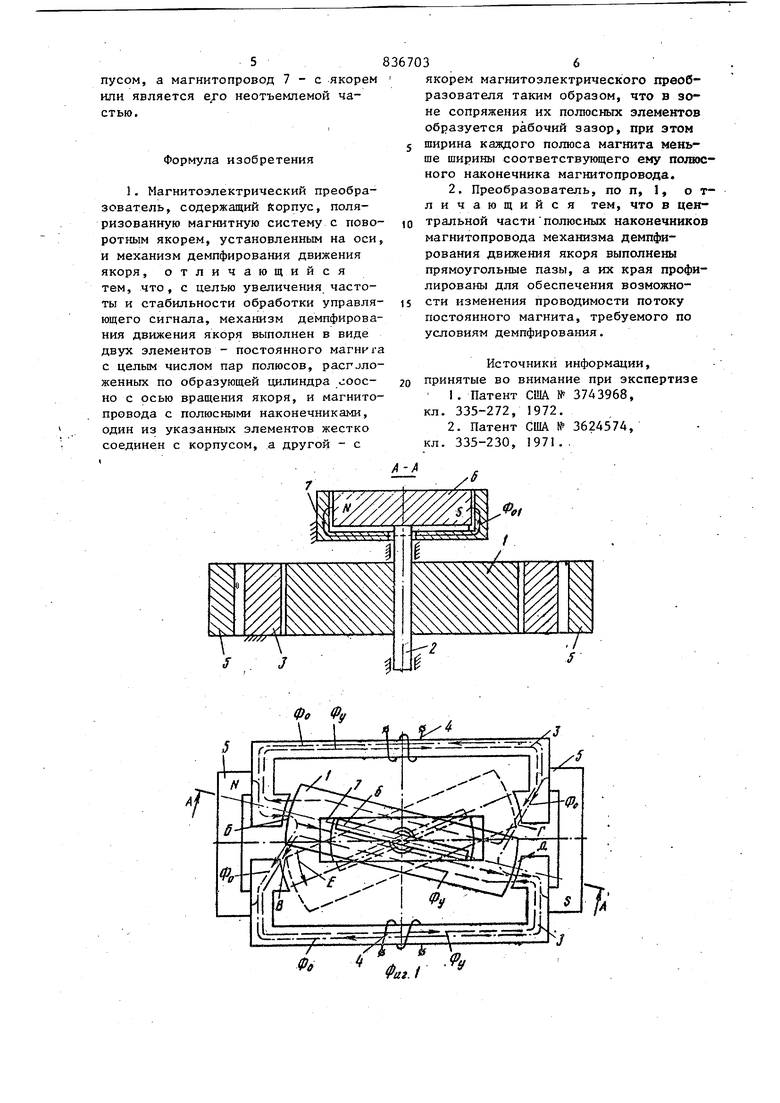
На фиг. I изображен преобразовате общий вид; на фиг. 2 - вариант выполнения магнитопровода механизма демпфирования.
Поворотный якорь 1 из магнитопровдящего материала закреплен на оси 2 и может вращаться в подшипниках корпуса (условно не показан).
Магнитная система преобразователя образована двумя магнитопроводами 3, расположенными на них обмотками 4 управления и двумя постоянным магнитами 5, полюса которых соединены с магнитоПроводами. Магнитопроводы закреплены в корпусе.
На оси закреплен постоянный магнит 6, полюса которого выполнены по образующей цилиндра, соосного с осью вращения якоря. К корпусу закреплен магнитопровод 7, полюса которого образуют концентричные воздушные зазоры с постоянным магнитом 6.
В том с лучае, когда в полюсных наконечниках магнитопровода выполнены прямоугольные пазы, а края профилированы (фиг. 2), достигаются более эффективное демпфирование якоря и наиболее стабильная работа устройств
Магнитоэлектрический преобразователь работает следующим образом.
При отсутствии управляющего сигнала якорь находится в одном из крайних положений (фиг. I). Магнитные потоки постоянных магнитов Фу замыкаются в основном через магнитопроводы, воздушные зазоры Б и Д и по якорю. Частично поток постоянных магнит замыкается также через воздушные зазоры В и Г.
При подаче укрепляющего сигнала в обмотке управления возникает магнитный поток управления Л,,, который замкается через магнитопроводы, воздушные зазоры Б, В, Г, Д и якорь.
При этом в зазорах В и Г происходит суммирование потока управления с потоком постоянных магнитов, а в зазорах Б и Д - вычитание. В результате возникает усилие, перемещающее якорь по стрелке Е в другое крайнее положение (показано пунктиром). При этом, вследствие запаса кинетической энергии, якорь стремится перейти через крайнее устойчивое положение, образуя выбег. Однако в этом случае постоянный магнит, жестко связанный с якорем, начинает выходить из зацепления с магнитопроводом 7. При этом возникают значительные усилия, препятствующие дальнейшему перемещению якоря, т.е. дополнительный магнит препятствует .выбегу якоря и способствует гашению колебания якоря вблизи крайнего устойчивого положения . Так как полюсные наконечники магнитопровода 7 образуют концентричные зазоры с полюсами магнита 6, при движении ег) в зоне рабочего угла поворота якбря не происходит изменения маг1штной проводимости зазоров, через которые замыкается магнитный поток Ф,,. магнита 6, т,е. не возникает усилия, препятствующего движения якоря. Усилие возникает только вблизи границы рабочего угла, когда полюса магнита 6 начина ют выходить из магнитного зацепления с полюсными наконечниками магнитопровода 7, т.е. когда начинает резко падать магнитная проводимость пото- , к& Фс,. .
На фиг. 1 показан вариант исполнения, где магнит 6 coeди Ieн с якорем, а магнитопровод 7 - с корпусом. Возможен также вариант исполнения, где магнит 6 соединен с корпусом, а магнитопровод 7 - с якорем или является е/о неотъемлемой частью.
Формула изобретения
якорем магнитоэлектрического преобразователя таким образом, что в зоне сопряжения их полюсных элементов образуется рабочий зазор, при этом ширина каждого полюса магнита меньше ширины соответствующего ему полюсного наконечника магнитопровода.
2, Преобразователь, по п, 1, отличающийся тем, что в центральной частиполюсных наконечников магнитопровода механизма демпфирования движения якоря выполнены прямоугольные пазы, а их края профилированы для обеспечения возможности изменения проводимости потоку постоянного магнита, требуемого по условиям демпфирования.
Источники информации, принятые во внимание при экспертизе 1. Патент США № 3743968, кл, 335-272, 1972.
/(-А
xJ
- - -I
