(54) МАГНИТОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитоэлектрический преобразователь | 1977 |
|
SU764151A1 |
| Магнитоэлектрический преобразователь | 1979 |
|
SU836733A1 |
| Магнитоэлектрический преобразователь | 1977 |
|
SU648283A1 |
| Двигатель с качательным движением якоря | 1978 |
|
SU792507A1 |
| Магнитоэлектрический преобразователь | 1978 |
|
SU694952A1 |
| Магнитоэлектрический преобразователь | 1979 |
|
SU836703A1 |
| Магнитоэлектрический преобразователь | 1980 |
|
SU970730A1 |
| Магнитоэлектрический преобразователь | 1979 |
|
SU836732A1 |
| Поворотный трансформаторный преобразователь | 1979 |
|
SU855751A1 |
| Магнитоэлектрический преобразователь | 1978 |
|
SU775832A1 |

1
Изобретение относится к преобразовательной технике, в частности, к магнитоэлектрическим преобразователям и вибраторам, преобразующим электрический сигнал в дискретное перемещение якоря.
Известны электродвигатели, .котор ые отрабатывают дискретные электрические . команды поворотом якоря на дискретные углы l Однако в случае контактирования выг ходкого вала со средой, подверженной загрязнению продуктами износа (например жидкость в гидравлических приводах)
засорение рабочих зазоров посторонними частицами приводит к выходу электродвигателей из строя, технической сущности является магнитоэлектрический преобразователь, содержащий якорь постоянные магниты, магнитопроводы и обмотки управления, отделенные от зоны перемещения выходного элемента, жестко соединенного с якорем при помощи гибкой тонкостенной трубки 2.
Однако в этой конструкции момент инерции якоря относительно продольной оси тонкостенной трубки (продольной оси выходного валика) преобразователя велик вследствие того, что якорь развит в перпендикулярном отдосительно оси трубки направлении.
Целью изобретения является улучшение динамических параметров магнитоэлектрического преобразователя.
Указанная цель достигается тем, что в предлагаемом преобразователе якорь выполнен в форме, цилиндра, продольная ось которого совмещена в нейтральном положении с продольной осы тонкостен ной трубки, магнитопроводы вьшолнены П-образными и расположены по разные стороны от якоря.
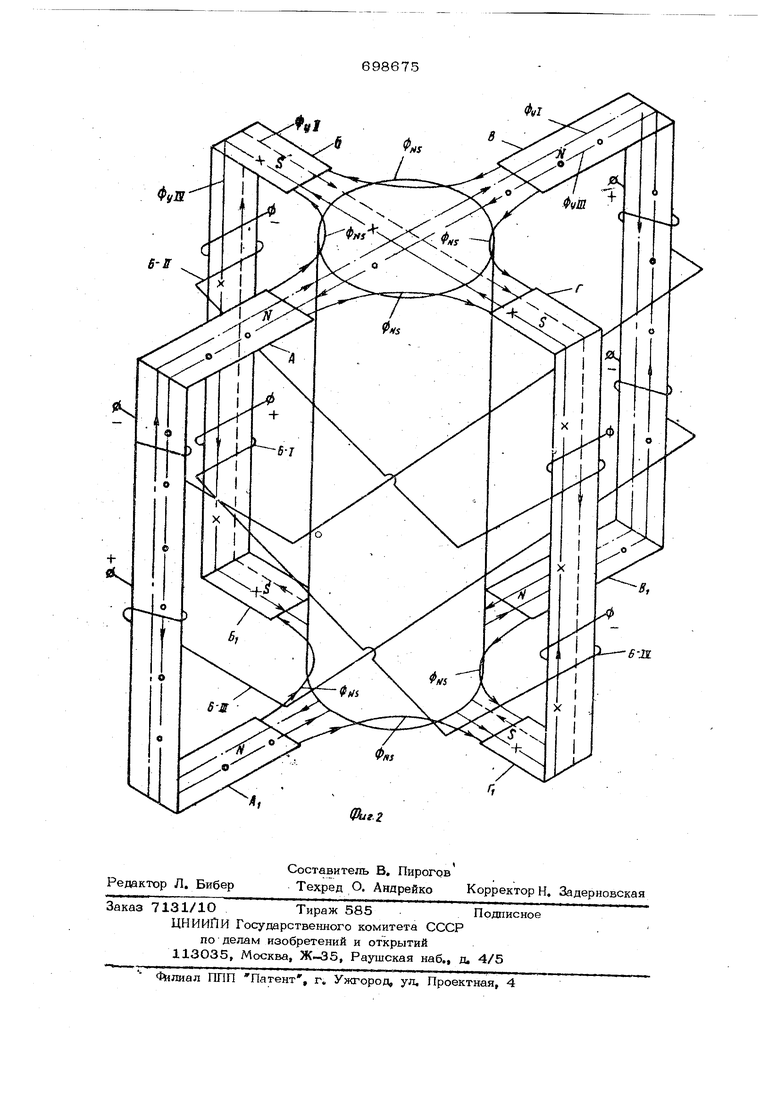
Кроме того, с целью получения мно- гопозиционного перемещения, в преобразователь введено h пар П-образных магнатопроводов, симметрично расположенных относительно оси якоря. На фиг, 1 изображена конструкция описываемого устройства (в качестве примера приведена конструкция 4-х позиционного преобразователя) на фиг. 2 схема расположения магнитопроводов и эбмоток управления. На основании 1 герметично укрепле на гибкая тонкостенная трубка 2. В верх ней части трубка 2 герметично соединяется с якорем 3 и валиком 4, выполняю тдим функции выходного элемента магнитоэлектрического преобразователя. Четыр магнитопровода 5 с расположенными на них обмотками управления 6-1,, , 6-1У крепятся на основании. Магнитопроводьз и якорь вьшолнены из магнитомягкого материала, а основание - из немагнитного материала. Между магнитолроводами устанавливаются восемь постоянных магдатов 7. Рабочие зазоры образуются между полюсами А, А , Б, Б, В, B.J, Г, Г и якорем. Устройство работает следующим образом (см, фиг, 2}„ При подаче электричес кого сигнала в обмотку управления 0-1 возникает магнитный поток управления , который суммируется с потоком Ф.,д постоянных магнитов в рабочих за зорах у полюсов А и В, и вычитается у полюсов В и AJ (постоянные магни ты для простоты изображения не показаны, а на полюсах проставлены знаки маг нитных потенциалов, создаваемых магнит ми - N5 , В результате якорь притягивается к полюсам В и А. При поддче управляющего сигнала в обмотку 6-11 возникает поток управления Фч, П сумми рующийся с потоком постоянных магни-тов в рабочих зазорах у полюсов Б и Г, и вычитающийся у полюсов Г и Б . В ре зультате якорь притягивается к полюсам Б и Г . При подаче управляющего сиг«нала в обмотку 6-4L возникает поток управления Фу Ш противоположный по шпра лению потоку Ф I, В результате якорь притягивается к полюсам В и А - , При подаче управляющего сигнала в обмотку возникает поток управления Ф( IV, противоположный по направлению потоку Ф, Ц, В результате якорь притягивается к полюсам Г и Б,| , Таким образом, якор занимает последовательно четыре положе- ьшя, а так как перемещения якоря происходят относительно его центра, то выходной конец вала при этом как бы описывает окружность (по образующей с верщиной в центре якоря). Устройство позволяет уменьшить момент инерции якоря и получить многопозиционное перемещение якоря (или конусообразное движение выходного валика) магнитоэлектрического преобразователя. Благодаря малому моменту инерции якоря относительно продольной оси тонкостенной трубки улучшаются динамические характеристики. Тонкостенная трубка предохраняет магнитные рабочие зазоры от загрязнения, а обмотки управления от разрушения в случае работы, например, с агрессивными жидкостями. Формула изобретения 1 Магннтоэлектрическнй преобразователь, содержащий якорь, постоянные магнить, магнитопроводы и обмотки управления, отделенные от зоны перемещения выходаого элемента, жестко соединенного с ,якорем при ПОМО1ДИ гибкой тонкостенной трубки, отличающий- с я тем, что, с целью улучшения динамических параметров, якорь выполнен в форме цилиндра,продольная ось которого совмещена в нейтральном положении с продольной осью тош остенной трубки, магнитопроводы выполнены П-юбразными и расположены по разные стороны от якоря, 2, Преобразователь по п,1, отличающийся тем, что, с целью получения МНОГОПОЗИЦИО1ШОГО перемещения, в него введено h пар П-образных маг- нитопроБодов, симметрично расположенных относительно оси якоря. Источники информации, принятые во внимание при экспертизе 1.Патент-США № 2962611, кл 31О29, 1965, 2,Патент США № 3492515, кл,310. 49, 1970 (прототип).
Г 7 В
/ I /
6-Ж
5,6,
Фи1.1
