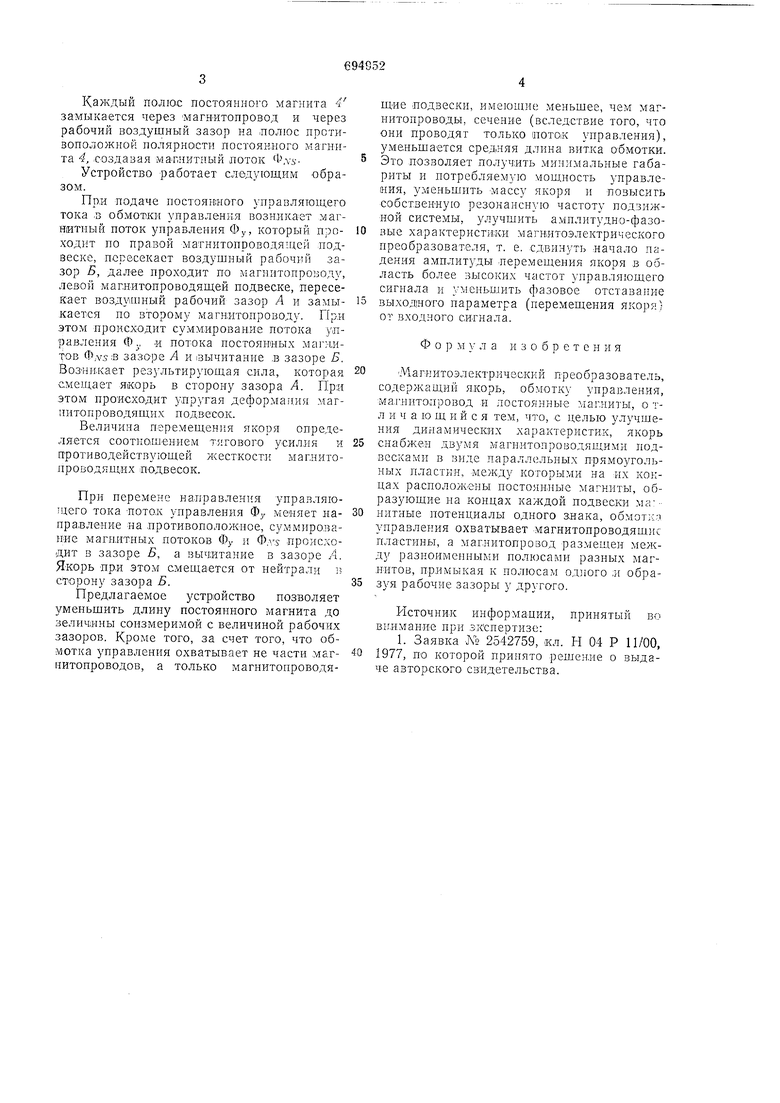
Каждый полюс постоянного -магнита 4 замыкается через магн-итопровод и через рабочий воздушный зазо.р на полюс противоположной полярности ПОСТОЯН.НОГО МаТН:Ита 4, создавая матдитный потох Ф/«Устройство -работает следующим образом. При подач-е постояниог-о управляющего тока ,в обмотки управленйя возникает магнитный поток управления Фу, кото-рый проходит по правой матн-итопроводящей подвеске, пересекает воздушный рабочий зазор Б, далее проходит по магнитопроводу, левой магнит-опроводящей подвеске, пересекает воздушный рабочий- зазо-р А и замы.кается по второму 1магн:итопроводу. Пр.и этом происходит суммирование потока управления Фу и потока постоянных магнитов Ф,У5(В зазоре А п вычитание ,в зазоре Б. Возннкает результирующая сила, которая смешает якорь в -сторону зазора А. При этом происх-одит упругая деформация магнитопроводящих подв-есо,к. Величина перемещения якоря определяется соотнО:Ш-ением -тя-говог-о усилия и противодействующей жесткости магнитопроводящих подвесок. При перемене направления управляющего тока поток управления Фу ме1няет напр авл-ение иа противоположное, суммирование магнитных потоков Фу и Фл- происходит в зазоре Б, а вычитание в зазоре А. Якорь при этом -смещается от нейтрали в сторону зазора Б. Предлагаемое устройство позволяет уменьшить длину постоянного магнита до величины соизмеримой с величиной рабочих зазоров. Кроме того, за счет того, что обмотка управления охватывает не части 1магнитойроводов, а только магнитопроводяЩИе подвески, имеющие меньшее, чем магнитопроводы, сечение (вследствие того, что они проводят только inoTOiK управления), уменьшается средняя длина витка обмотки. Это .позволя-ет получить минимальные габариты и потребляемую мощность управления, уменьшить массу якоря и -повысить собственную резонансную частоту подвижной системы, улучшить амплитудно-фазовые характеристшш магнитоэлектрического преобраз-ователя, т. е. сдеинуть начало падения амплитуды перемещ-ения як-о-ря в область более высоких частот управляющего сигнала .и уменьшить фазовое отставание выходного параметра (перемещения якоря) -от входного сигнала. Формула изобретения Магнитоэлектрический преобразователь, содержащий якорь, обмотку управления, ма.гнитопров&д и п-остоянные маг/ниты, о тл и чающийся тем, что, с целью улучшения динамических характеристик, якорь снабжен двумя магнитопроводящими под1весками в виде параллельных прям-оугольных пластин, между к-оторыми на их концах располож-ены постоянмые магниты, образующие на койцах каждой подвески магнитные потенциалы одного знака, обмотка управления охватывает магнитопроводящие пластины, а мапнитопровод размещен между разноименными полюсами разных магнитов, примыкая к полюсам одного и образуя рабочиезазоры у другого. Источник информации, принятый во внимание при экспертизе: 1. Заявка № 2542759, кл. Н 04 Р 11/00, 1977, по которой пр-инято решение о выдаче авторского свид-етельст1ва.
//j
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитоэлектрический преобразователь | 1979 |
|
SU836732A1 |
| Магнитоэлектрический преобразователь | 1979 |
|
SU836703A1 |
| Магнитоэлектрический преобразователь | 1979 |
|
SU836733A1 |
| Магнитоэлектрический преобразователь | 1980 |
|
SU970730A1 |
| Двигатель с качательным движением якоря | 1978 |
|
SU792507A1 |
| Магнитоэлектрический преобразователь | 1977 |
|
SU698675A1 |
| Электромагнитный вибратор | 1978 |
|
SU676331A1 |
| Магнитоэлектрический преобразователь | 1977 |
|
SU648283A1 |
| Шаговый электродвигатель | 1980 |
|
SU1010705A1 |
| ПОЛЯРИЗОВАННЫЙ ДВУСТАБИЛЬНЫЙ ДЛИННОХОДОВОЙ ЭЛЕКТРОМАГНИТ СО СДВОЕННОЙ ПОСЛЕДОВАТЕЛЬНОЙ МАГНИТНОЙ ЦЕПЬЮ | 2018 |
|
RU2683575C1 |

