Изобретение относится к измерительной технике и может быть исполь-. зовано в автоматизированных системах аэродинамического эксперимента.
Известен пятиканальный зонд, который каждой парой угломерных каналов подключен к дифференциальному манометру. Перемещение такого устройства в пространственном потоке осуществляется двухстепенным координатным устройством вручную, в экваториальной плоскости и вдоль своей оси l.
Недостатком такого устройства является отсутствие возможности ориентации зонда в меридиальной плоскости, в результате чего угол в меридиальной плоскости и скорость исследуемого потока определяют путем громоздкой обработки результатов эксперимента с помощью градуировочных характеристик зонда.
Известно также устройство для измерения параметров пространственного потока, содержащее пятиканальный зонд, подключенный приемником полного давления к манометру, двумя парами угломерных каналов - ко входам дифференциальных манометров и соединенный с электромеханическими узлами угловыХ и линейного перемещений 2 .
Недостатком этого устройства является неизбежная потеря информации о параметрах потока в промежуточных точках положения пятиканального зонда, что приводит к уменьшению точности. Увеличение числа фиксированных точек, в которых производят замеры параметров потока, затягивает эксперимент и предъявляет жесткие требования к быстродействию элементов ориентации зонда по углу. Кроме того, в таком устройстве перемещение пятиканального зонда в пространстве осуществляется вручную.
- Цель изобретения - повышение точности и быстродействия устройства.
Поставленная цель достигается тем, что в устро.йство для измерения параметров пространственного потока, содержащее пятиканальный зонд, подключенный приемником полного давления к манометру, двумя парами угломерных каналов ко входам дифференциальных манометров и соединенный с электромеханическими узлами угловых и линейного перемещений, введены два нелинейных блока, сумматор и коммутатор, при этом входы нелинейных блоков соединены с соответствующими входами блоков угловых перемещений и выходами
дифференциаль 1ых манометров, выходы нелинейных блоков подключены ко входам коммутатора и сумматора, выход кторого через коммутатор соединен со входом блока линейного перемещения.
Введение нелинейных блоков, сумматора и коммутатора и соединение их указанным образом позволяет осуществить связь между блоками угловых и линейного перемещений и непрерывно измерять параметры пространственного потока.
Введение нелинейных блоков, соединенных соответственно своими входами со входами электромеханических узлов углового перемещения и с выходами дифференциальных манометров позволяетпередать на сумматор только тогда сигнал, когда пятиканальный зонд займет правильное угловое положение в меридиальной и экваториальной плоскостях, так как каждый нелинейный блок представляет собой электронный блок, выходная характеристика которого имеет вид
ОВЫУ ивычуу ач -KUeik (при /U BX/ /Uore и вы -Опри /UBx/ /Uo-Tc
где Ug - напряжение на входе нелинейного блока,
JOTC напряжение отсечки,
ивыч напряжение на выходе блока К - коэффициент пропорциональ ности, зависящий от параметров электронного блока
Таким образом, выходной сигнал нелинейного блока тем больше, чем меньше сигнал на его входе, а при выходных напряжениях, больших заданного, выходной сигнал равен нулю.
Введение коммутатора позволяет осуществить передачу сигнала на узел линейного перемещения только в том случае, когда на выходе каждого нелинейного блока существует выходной сигнал, превышающий нулевой, т.е. когда пятиканальный зонд ориентирова по углу в пределах допустимой угловой ошибки как в мерродиональной, так и в экваториальной плоскостях.
Наличие сумматора позволяет регулировать скорость линейного перемещения пятиканального зонда с зависимости от суммарной угловой ошибки зог;да, чем достигается повышение точности непрерывного измерения и быстрдействия его работы.
При этом измерения не сопровождаются потерей информации о;направлении потока и давлении, так как пятиканальный зонд во всех точках при линейном перемещении ориентирован по потоку с точностью, определяемой напряжением отсечки нелинейных блоко
Кроме того, введение в устройство указанных блоков и их связей позволяет полностью автоматизировать процесс перемещения пятиканального зонда в пространственном потоке.
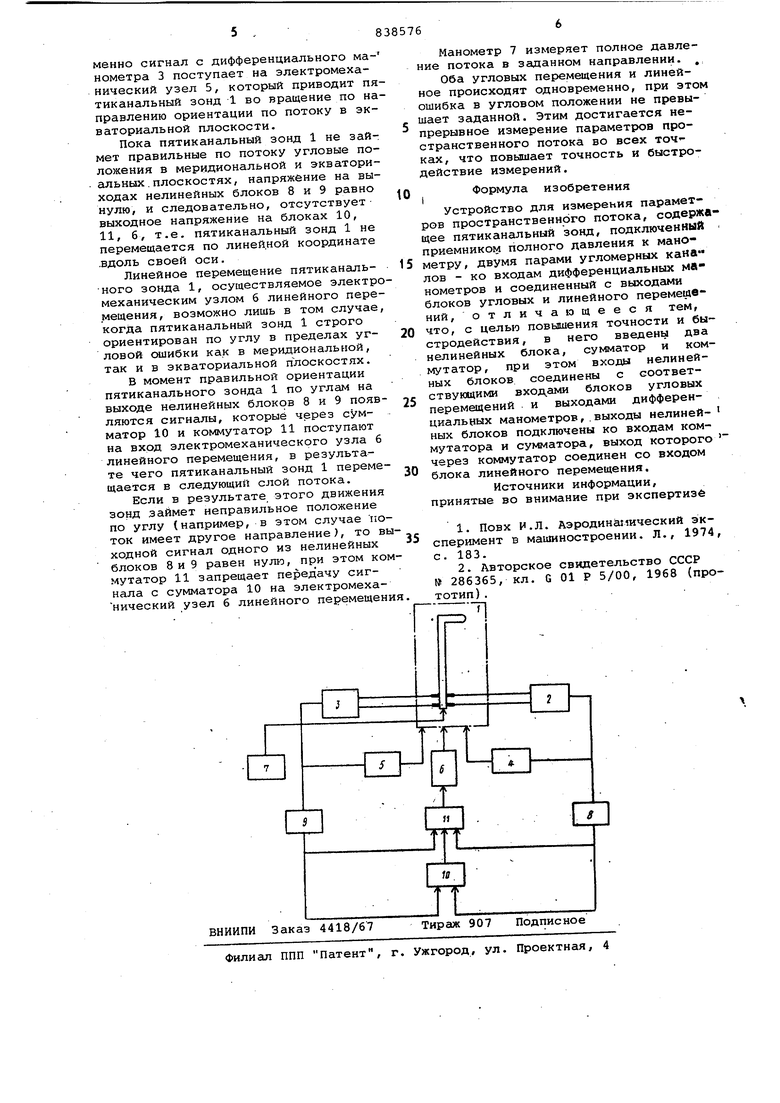
На чертеже И1 пнедена схема устройства для измерения параметров пространственного потока.
Устройство содержит пятиканальный зонд 1, дифференциальные манометры 2, 3, электромеханические узлы 4 , 5 угловых перемещений, электромеханический узел б линейного перемещения, манометр 7, нелинейные блоки 8, 9, сумматор 10, коммутатор 11.
Пятиканальный зонд 1 выполнен в виде шарика р пятью приемными каналами, два из которых предназначены для ориентации пятиканального зонда 1 в меридиональной плоскости и подключены к дифференциальному манометру 2,другие два приемные канала предназначены для ориентации пятиканаль;;ого зонда 1 в экваториальной плоскости и подключены к дифференциальному манометру 3, пятым приемником полного давления пяткканальнй зонд 1 подсоединен к манометру 7.
Пятиканальный зонд 1 соединен -с выходами электромеханических узлов 4-6 угловых и линейного перемощений.
Выходы дифманометров 2 и 3 соединены со входами соответствующих им нелинейных блоков 8 и 9 и электромеханических узлов 4 и 5 углового перемещения. Выходы нелинейных блоков 8 и 9, соединены со входами сумматора 10 и коммутатора 11.
Выход сумматора 10 соединен со входом коммутатора 11, выход которого подсоединен ко входу электромеханического узла 6 линейного перемещения.
Узлы 4-6 содержат электродвигатели и усилители мощности к ним, а также механизмы преобразования вращения двигателей в угловые и линейное перемещения пятиканального зонда 1 соответственно (на чертеже не показано).
Нелинейные блоки 8 и 9 представляю электронные блоки, напряжение отсечки иотс которых выбирают таким, чтобы оно соответствовало допустимой угловой погрешности в положении зонда. При таком выборе напряжения отсечки выходной сигнал на нелинейных блоках 8 и 9 равен нулю (если входное больше заданного). Чем меньше сигнал на входе нелинейных блоков, тем больше он должен быть на его выходе.
Устройство работает следующим образом. .
Пятиканальный зонд 1 размещают в исследуемом потоке, параметры которого (давление и направлениеJ необходимо .определить.
Пусть пятиканал1 ный :юнд 1 в исходном положении произвольно ориентирован по потоку. Тогда при включении системы сигнал с дифференциального MfiHcweTpa 2 пост пает на электромеханический узел 4, который приводит пятиканальный зонд 1 во вращение к направлению ориентации по потоку в меридиональной плоскости. Одновре
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмометрический измеритель параметров плоского потока | 1981 |
|
SU974276A1 |
| Устройство для измерения направления двухмерного парового потока | 1980 |
|
SU922640A1 |
| Устройство для измерения направления двухмерного потока | 1979 |
|
SU781700A2 |
| Устройство измерения параметровдВуХМЕРНОгО пОТОКА | 1979 |
|
SU800889A1 |
| Устройство для измерения направления двухмерного потока | 1977 |
|
SU661345A1 |
| Устройство для управления перемещением аэродинамического зонда | 1984 |
|
SU1383205A1 |
| Устройство для определения направления парогазового потока | 1979 |
|
SU980006A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА И ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2251712C1 |
| Оптико-электронное устройство для измерения линейных перемещений объектов | 1980 |
|
SU939937A1 |
| Оптико-электронное устройство для измерения линейных перемещений объектов | 1982 |
|
SU1055966A1 |
