Изобретение относится к области автоматики и может быть использовано в автоматизированных системах проведения газодинамических исследований, в частности в системах управления перемещением зонда для измерения полей скорости и давлений потоков.
Цель изобретения - повышение точности непрерывного измерения направления потока.
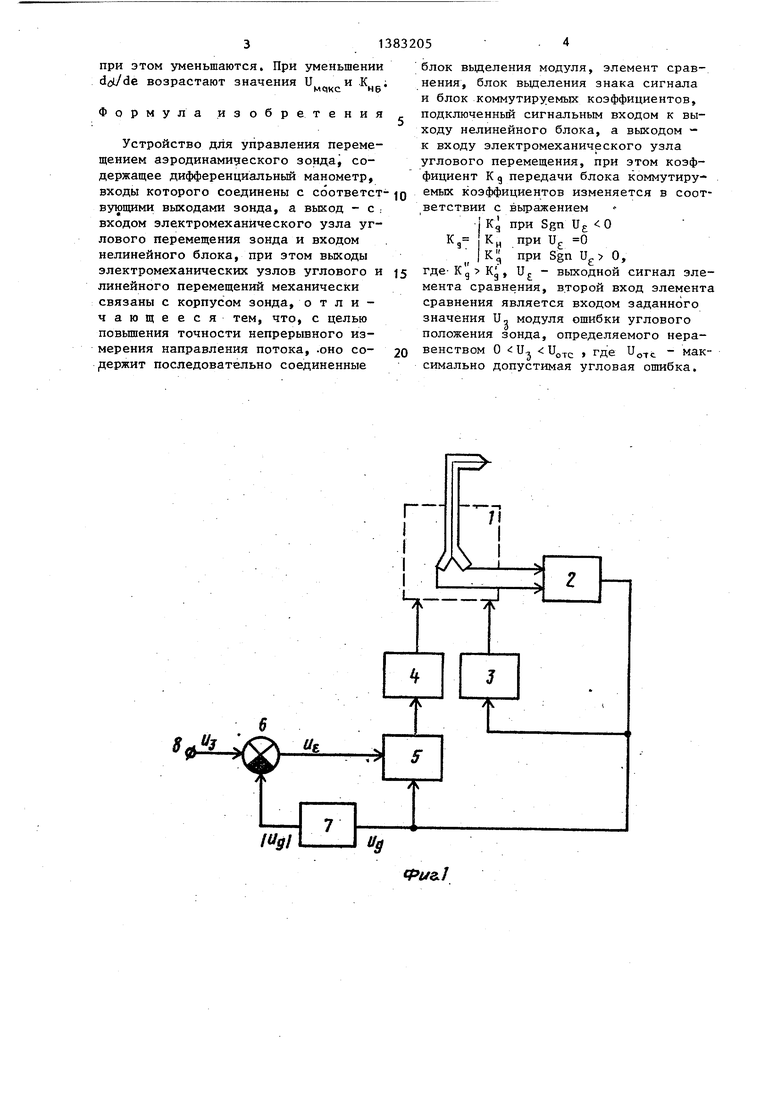
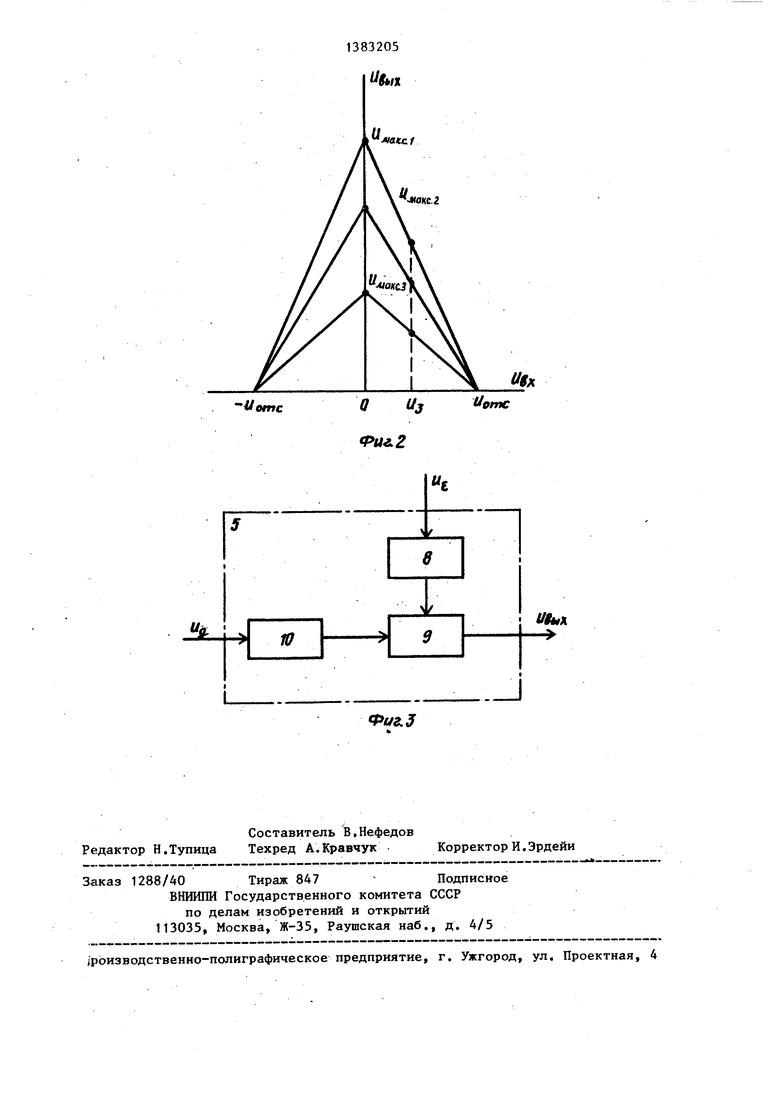
На фиг.1 приведена функциональная схема устройства; на фиг.2 - статическая характеристика нелинейного блока; на фиг.З - блок-схема видоизмененного нелинейного блока.
Устройство соде.ржит. зонд 1, дифференциальный манометр 2, электромеханический узел 3 углового перемещения электромеханический узел 4 линейного перемещения, видоизмененньй нелиней- ньй блок 5, элемент 6 сравнения, бло 7 вьщеления. модуля, блок 8 вьщеления знака, блок 9 коммутируемых коэффи- циентов и нелинейный блок 10.
Блоки устройства соединены между собой в соответствии со схемами (фиг.1 и 3).
Электромеханические узлы 3 и 4 со ответственно углового и линейного перемещений зонда содержат электродвигатели и усилители мощности к ним а также механические преобразователи вращения двигателей в угловое и линейное перемещение зонда соответственно.
Зонд 1 преобразует угол ct натека- ния потока в разность давлений, изме ряемую дифференциальным манометром 2, Сигнал и „ манометра 2, соответствующий текущему значению угловой ошибки в ориентации зонда 1 по потоку, подается на электромеханический узел углового перемещения зСонда и на нелинейньш блок 10, статическая характеристика которого в любой момент времени определяется выражением
вых UB,,, 0
де Ug Ugl при lUgU ц
отс
и
вмх
U qKC-iKnb „ , ч при lUg| UOT. , (1)
напряжение на входе видоизмененного нелинейного блока 5, соответствующее сигналу угловой ошибки ориентации зонда по потоку; напряжение на выходе видоизмененного нелинейного блока 5, соответствующее управляющему воздействию на элект10
15
20 25
ЗО
д
5
5
0
5
и
МРКС
и
отс
к
нь
и.
ромеханический узел 4 линейного перемещения зонда; максимальное напряжение на выходе видоизмененного нелинейного блока 5; напряжение отсечки, соответ- ствзтощее граничному значению допустимой угловой ошибки
UtHnl r
- - коэффициент наклона отс
характеристики видоизмененного нелинейного блока 5.
Если зонд 1 в исходном положении произвольно ориентирован по потоку, то при включении устройства сигнал с выхода манометра 2 автоматически, приводит зонд с помощью электромеха- ничес15ого узла 3 углового перемещения зонда во вращение к направлению ориентации по потоку.
В момент достижения ошибки ориентации зонда 1 по потоку соответствующей допустимому граничному значению включается рабочая зона, нелинейного блока 10 и зонд начинает перемещение вдоль линейной координаты е.
Одновременно на выходе элемента 6 сравнения непрерывно формируется сигнал рассогласования Uc- U3-fUo/, который подается на дополнительный управляющий вход блока 5 для автоматического изменения параметров его характеристики.
В процессе ориентации зонда 1 при перемещении рабочей точки по хара.кте- рйстике блока 5 на участке от / Ug-f / до / и 3 / под действием сигнала U уменьшаются значения U. и J что приводит к уменьшению -величины и и скорости линейного перемещения зонда 1. Автоматически уменьшается скорость изменения исследуемого параdc
метра г на входе устройства и уско- dt
ряется смещение рабочей точки к значению и. В йомент, когда рабочая .точка достигает значения U,,, процесс
КНБ)
изменения (уменьшения параметров нелинейной характеристики прекращается, поскольку .
Если в процессе функционирования устройства происходит изменение величины dot/de , а вместе с тем и (/dt, изменяются и значения /Unj и Uj. Когда величина do(/d4 растет, то увеличивается /Ug/ и Uf, а Ujy, и K
при этом уменьшаются. При уменьшении dclJde возрастают значения ,H
Формула изобретения
Устройство для управления перемещением аэродинамического зонда содержащее дифференциальный манометр, входы которого соединены с соответствующими выходами зонда, а выход - с : входом электромеханического узла углового перемещения зонда и входом нелинейного блока, при этом выходы электромеханических узлов углового и линейного перемещений механически связаны с корпусом зонда, отличающееся тем, что, с целью повышения точности непрерывного измерения направления потока, -оно со- рержит последовательно соединенные
блок вьщеления модуля, элемент сравнения, блок вьщеления знака сигнала и блок коммутируемьрс коэффициентов, подключенный сигнальным входом к выходу нелинейного блока, а выходом - к входу электромеханического узла углового перемещения, при этом коэффициент Kg передачи блока коммутируемых коэффициентов изменяется в соответствии с выражением
0
- при Uj.
К при Sgn U О, 5 где-Kg Kg, Uj - выходной сигнал элемента сравнения, второй вход элемента сравнения является входом заданного значения U, модуля ошибки углового положения зонда, определяемого нера
j Kg При Sgn UE Кз К„ при Uj. 0
и.
- маквенством О и, , где отс симально допустимая угловая ошибка.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения параметровпРОСТРАНСТВЕННОгО пОТОКА | 1979 |
|
SU838576A1 |
| Устройство для измерения направления двухмерного потока | 1979 |
|
SU781700A2 |
| Устройство измерения параметровдВуХМЕРНОгО пОТОКА | 1979 |
|
SU800889A1 |
| Пневмометрический измеритель параметров плоского потока | 1981 |
|
SU974276A1 |
| Устройство для измерения направления двухмерного парового потока | 1980 |
|
SU922640A1 |
| Задающее устройство для электропривода | 1986 |
|
SU1410251A1 |
| Устройство для определения направления парогазового потока | 1979 |
|
SU980006A1 |
| Устройство для моделирования вентильного электродвигателя | 1985 |
|
SU1425732A1 |
| Устройство для измерения направления двухмерного потока | 1977 |
|
SU661345A1 |
| Преобразователь углового положения вала в напряжение | 1985 |
|
SU1296828A1 |
Изобретение относится к системам для измерений параметров потока веществ и может быть использовано в качестве системы автоматического управления положением аэро- и гидродинамического зонда. Цель изобретения - повышение точности непрерывного измерения направления потока, которая достигается введением новых блоков и функциональных связей, позволяющих осуществить автоматическую подстройку параметров контура регулирования углового положения зонда для достижения минимальной величины ошибки ориентации зонда. Устройство содержит зонд, дифференциальный манометр, электромеханический узел линейного перемещения, электромеханический узел углового перемещения, нелинейный блок, элемент сравнения, блок выделения модуля, блок определения знака и блок коммутируемых коэффициентов. Повьщ1ение точности ориентации зонда достигается введением в устройство блока выделения модуля, элемента сравнения, блока выделения знака и блока коммутируемых коэффициентов. 3 ил. с (Л
fug.J
| Горлин С.М | |||
| и др | |||
| Аэродинамические измерения | |||
| - М.: Наука, 1964, с.293-296, с.589-597 | |||
| Устройство для измерения направления двухмерного потока | 1977 |
|
SU661345A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
