Изобретение относится к области систем слежения за подвижными объектами, в том числе с подвижного основания.
Из литературы (см., например [1], стр. 344, 347, 378 - рис. в, а также термограммы 6, 44, 49, указанные там же в приложении - стр. 386-391) известно, что объекты с тепловыми двигательными установками в среднем и дальнем инфракрасном диапазоне электромагнитных волн дают изображение, средневзвешенный центр яркости которого существенно отличается от геометрического центра контура изображения. Кроме того, если имеет место высокотемпературный выхлоп или факел, значительно изменяется и форма контура изображения по сравнению с контуром без такого выхлопа. Следует также отметить, что излучение факела реактивного двигателя имеет значительные составляющие в ультрафиолетовом, видимом и ближнем ИК-диапазонах длин волн. Вызванное вышеуказанными причинами искажение образа не позволяет достаточно точно определить угловое положение объекта по его изображению. Существенно изменяют образ изображения по сравнению с геометрическими формами объекта также такие феномены, как плазменный след за метеором или входящим в атмосферу космическим аппаратом, бурун за водными транспортными средствами, а также поднятыми перископами и воздухозаборниками подводных аппаратов, инверсионный след за высоколетящими летательными аппаратами.
Известен способ визуализации изображения [2], заключающийся в преобразовании потока излучения в видеосигнал, измерении смещения изображения, задержке информации о смещении на время, равное запаздыванию в формировании видеосигнала, пересчете на направление развертки с учетом нелинейностей ОЭП задержанных величин, формировании адреса записи с учетом пересчитанного смещения, запоминании элементов видеосигнала в соответствии с полученными адресами и считывании запомненного сигнала в последовательности, соответствующей закону развертки. Этот способ позволяет получить в растре стабилизированное изображение, но отсутствие операций, позволяющих анализировать изображение и сравнивать его с эталоном, не дает возможности определить координаты изображения относительно растра.
Известен способ определения координат подвижных объектов [3], при котором формируют изображение объектов и фона, преобразовывают его в видеосигнал и, сравнивая полученный образ с эталонными, получают координаты изображений, функционал сравнения с соответствующим эталоном которых наибольший (наименьший), и принимают их за координаты объекта в измерительной системе координат. Такой способ при работе с подвижного или качающегося основания формирует координаты изображений в нестабилизированной измерительной системе координат, а если имеют место искажения образа по сравнению с геометрическими параметрами объекта, то возникают и неточности, обусловленные и этим фактором.
Наиболее близким к предлагаемому способу определения координат объекта является приведенный в [4]. При реализации этого способа объект пеленгуют (преобразовывают изображение объекта и фона в видеосигнал, сравнивают с эталоном и принимают за координаты объекта относительно поля зрения положение тех образов, функционал соответствия которых эталону наилучший), пересчитывают координаты из измерительной в стабилизированную систему картинной плоскости. Кроме этого, осуществляют процедуры пересчета из картинной в систему стабилизированных сферических координат по углу горизонтального наведения, расчета корректирующих сигналов управления, преобразования сигналов коррекции из стабилизированной в исполнительную систему координат и разворота по полученным сигналам центра поля зрения в сторону центра изображения объекта. Этот способ позволяет получить стабилизированные координаты изображения объекта в картинной плоскости, но наличие искажений образа по сравнению с его геометрическими параметрами не учитывается.
Известна следящая система [5], стр. 228, 229, рис. 6.7, состоящая из последовательно соединенных датчика поступательного движения, вычислителя, гиростабилизатора, пеленгатора и усилителя мощности, выход которого соединен со вторым входом гиростабилизатора, позволяет осуществлять сопровождение с качающегося основания. Однако из-за отсутствия блоков, учитывающих несовпадение центров изображения и центра геометрической проекции объекта, нет возможности достаточно точно определить угловое положение объекта относительно центра поля зрения пеленгатора.
В [6], стр. 232, рис. 7.17, описана телевизионная система со следящим стробом, содержащая последовательно включенные телевизионную камеру, устройство обработки видеосигнала, решающее устройство, электронный интегратор, привод наведения, выходной вал которого через механическую передачу соединен с телевизионной камерой, а также задающее устройство, вход которого соединен с выходом электронного интегратора, а выход - со вторым входом решающего устройства. Эта система также по указанным выше причинам не способна точно определить координаты объектов с тепловой двигательной установкой. Синхронизация работы в данной системе осуществляется по сигналам с телекамеры. Собственно определение координат в этой системе производится оптико-электронным устройством в составе телевизионной камеры, устройства обработки видеосигнала, решающего устройства и электронного интегратора.
Наиболее близкой к предлагаемому устройству является следящая система [7], содержащая последовательно соединенные оптико-электронный блок(ОЭБ), блок определения координат, первый преобразователь координат (из измерительной в стабилизированную систему), коммутатор, корректирующее устройство, второй преобразователь координат (из стабилизированной в исполнительную систему), исполнительное устройство, третий преобразователь координат (из исполнительной в измерительную систему). Выход исполнительного устройства кинематически связан с оптико-электронным блоком, а выход третьего преобразователя координат соединен со вторым входом блока определения координат. Второй вход коммутатора служит для управления от внешних систем. В этой системе оптико-электронный блок, блок определения координат и преобразователь из измерительной в стабилизированную систему координат (ПКИзС) образуют в совокупности оптико-электронное устройство, формирующее координату сопровождаемого объекта относительно центра поля зрения в стабилизированной сферической системе координат (СССК), причем первые два блока выполняют функцию оптико-электронного пеленгатора.
Оптико-электронное устройство этой системы также не позволяет точно определить координаты объекта при наличии искажающих его геометрический образ элементов.
Задачей предлагаемой группы изобретений является повышение точности определения координат движущихся объектов с известным расположением искажающих геометрический образ элементов.
Действительно, если известно расположение искажающих геометрический образ объекта элементов относительно его геометрического центра в системе координат, связанной с объектом (ДОСК), например такой, что оси проходят через центр, причем одна в продольном направлении, другая в вертикальном, а третья перпендикулярна первым двум, то, зная ракурс объекта, можно вычислить и положение проекций искажающих элементов относительно проекции геометрического центра объекта на поверхность, на которой формируется изображение предметов и фона, находящихся в пределах поля зрения устройства, осуществляющего пеленгацию. С другой стороны для движущегося объекта в большинстве случаев продольная ось совпадает с вектором скорости, а крен в среднем за время движения равен нулю.
Учитывая сказанное, поставленная задача решается тем, что в способе определения координат объекта, при котором определяют угловую координату изображения объекта вместе с изменяющими образ элементами в поле зрения и пересчитывают полученную величину в стабилизированную систему координат, дополнительно определяют величину и направление линейной скорости объекта в стабилизированной системе координат, формируют величину углового смещения в стабилизированной картинной плоскости исходя из полученной величины и координат, характеризующих линейное смещение изменяющих образ элементов относительно собственной системы координат объекта, и корректируют угловую координату изображения объекта вместе с искажающими образ элементами в стабилизированной системе координат на величину углового смещения.
Реализация описанного способа обеспечивается тем, что в оптико-электронное устройство (ОЭУ), содержащее последовательно соединенные оптико-электронный пеленгатор и преобразователь из измерительной в стабилизированную систему координат, введены последовательно соединенные блок определения линейной скорости объекта, блок формирования величины углового смещения и сумматор, второй вход которого соединен с выходом преобразователя из измерительной в стабилизированную систему координат. При этом как один из вариантов исполнения ОЭУ можно использовать блок формирования величины углового смещения, состоящий из последовательно соединенных блока обратной пропорциональности и блока умножения, причем вход блока обратной пропорциональности и выход блока умножения соединены соответственно со входом и выходом блока формирования величины углового смещения, а второй вход блока умножения является входом угловой скорости. При этом блок обратной пропорциональности может быть выполнен с возможностью изменения коэффициента передачи.
Все используемые в приведенном способе операции по отдельности известны или могут быть сведены к совокупности известных операций. Определение угловой координаты изображения может быть осуществлено аналогично прототипу. Пересчет измеренной координаты в стабилизированное значение в картинной плоскости для угла места (вдоль меридиана стабилизированной сферической системы координат) также полностью аналогичен прототипу, а для дуги в плоскости ортогональной меридианальной в отличие от прототипа не производится деление на косинус угла места (т.е. не применяется секансное преобразование). Последовательности действий, необходимых для расчета значения линейной скорости и определения углового смещения, будут раскрыты ниже. Корректировка представляет собой операцию алгебраического суммирования.
При описании способа подразумевается, что сигналы, не формируемые в результате описываемых операций, поступают извне. Описание приводится для одного вектора состояний (совокупности сигналов, необходимых для формирования одной выходной координаты), т.к. процесс формирования другой координаты полностью аналогичен.
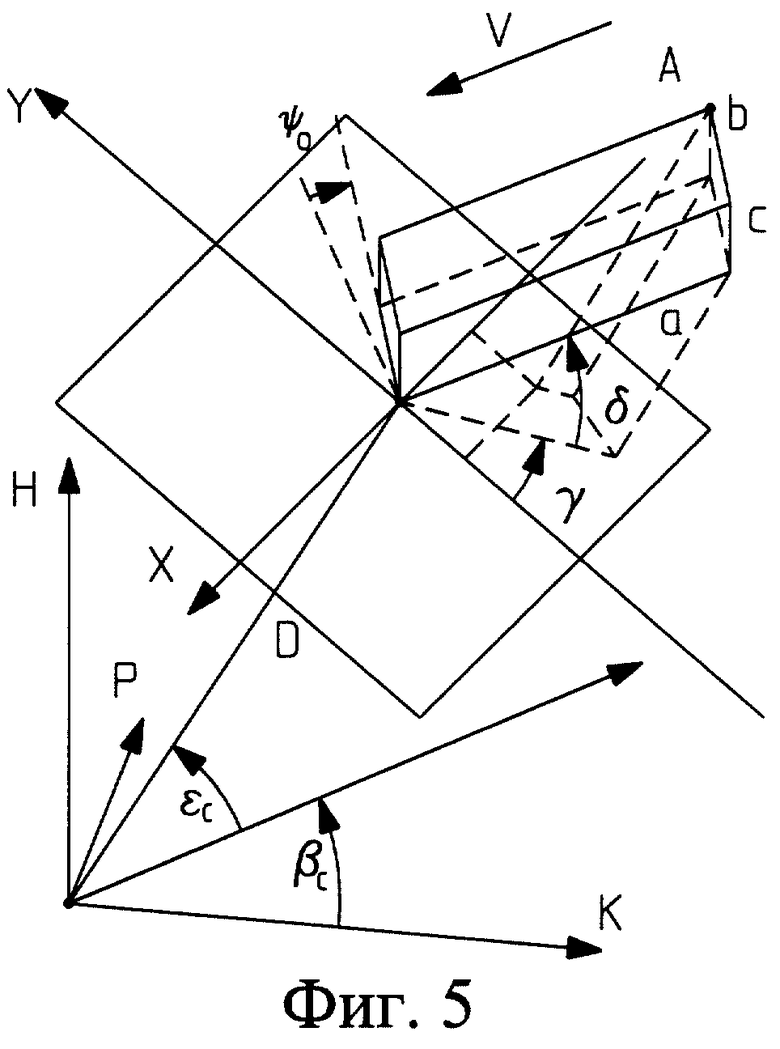
Пусть в сферической системе координат (βс, εс, D) наблюдается некоторый объект. Если известны координаты в ДОСК произвольной точки А (а, b, с) и ориентация объекта относительно картинной плоскости (см. фиг.5), то координаты проекции этой точки на картинную плоскость (x, y) могут быть определены по зависимостям (1):

где δ - угол между продольной осью объекта и картинной плоскостью;
ψo - угол между поперечной осью объекта и картинной плоскостью;
γ - угол между проекцией продольной оси объекта на картинную плоскость и осью у, связанной с картинной плоскостью системы координат;
xa, yа - координаты проекции точки А на картинную плоскость
хо, yо - координаты проекции начала координат ДОСК на картинную плоскость (на фиг.5 для простоты проекция начала координат ДОСК показана совпадающей с началом координат картинной плоскости).
Пусть направление вектора линейной скорости V совпадает с продольной осью наблюдаемого объекта, тогда его проекции на радиус-вектор сферической СК и оси x, y картинной плоскости могут быть получены по зависимостям (2):
где Vx - проекция линейной скорости на ось x картинной плоскости;
Vy - проекция линейной скорости на ось у картинной плоскости;
Vd - проекция линейной скорости на радиус-вектор сферической СК.
Если система координат (βс, εc, D) стабилизированная и ось y картинной плоскости лежит в плоскости измерения εc (в дальнейшем по аналогии с [8], стр. 40-47, будем называть плоскость измерения угла βс экваториальной, а плоскость измерения угла εc - меридианальной), то справедливы взаимосвязи (3):
где  - угловые скорости перемещения радиус-вектора по дугам больших кругов (ортодромам) в меридианальной и ортогональной ей плоскостях.
- угловые скорости перемещения радиус-вектора по дугам больших кругов (ортодромам) в меридианальной и ортогональной ей плоскостях.
Следует отметить, что, если ось у не лежит в меридианальной плоскости, но известен угол между осью у и указанной плоскостью, например δγ, то значения проекций линейной скорости на соответствующие оси могут быть получены из (2) при корректировке угла γ на величину δγ.
В системе, пеленгующей объект, угловые скорости перемещения линии визирования всегда могут быть определены. Например, если оптическая ось пеленгатора неподвижна, то в стабилизированной системе угловые скорости представляют собой производные от измеряемых пеленгов. Если оптическая ось подвижна (имеются устройства для перемещения оптико-электронного прибора или его элементов), то скорости могут быть получены исходя из сигналов с датчиков углового положения, скорости, ускорения и сигналов, характеризующих положение линии визирования относительно оптической оси. Сигнал, определяющий дальность, также может быть получен как из пеленгующей системы, например, если объект опознан - по размеру угловой проекции и известным линейным размерам объекта, или при использовании активной подсветки объекта - по задержке отраженного сигнала, так и от внешних систем, например локаторов обзора и сопровождения, лазерных дальномеров, сонаров и т.п. А если получен сигнал дальности, то может быть получена и производная от него. То есть, учитывая, что vd=-D', а из (3) могут быть получены Vx и Vy:
то имеются все три ортогональные компоненты вектора скорости, а следовательно, из системы уравнений (2) могут быть получены значения V, δ, γ. В частности, может быть получено соотношение (2а):

При сравнении систем уравнений (1) и (2) видно, что в них используются одни и те же углы δ и γ. Для определения угла ψo можно найти проекции вектора скорости V на взаимно ортогональные оси: вертикальную Н, курсовую, образованную пересечением плоскостей нулевого меридиана и экваториальной, К, параметрическую Р. При этом следует учитывать, что, если ось у лежит в меридианальной плоскости перпендикулярно оптической оси, то ось х, перпендикулярная ей, и оптической оси пеленгатора будет лежать в плоскости параллельной экваториальной. Так как меридианальные плоскости проходят через ось Н, то угол между осями Н и y равен εc. Угол же между проекцией оси x на экваториальную плоскость и осью Р равен βc. С учетом сказанного проекции вектора V на стабилизированную декартову систему координат (К, Н, Р) можно вычислить по формулам (4):

Зная проекции скорости на оси декартовой СК, можно найти углы ориентации относительно нее в СССК:

Тогда с точностью до величины угла атаки α, продольная ось а объекта ориентирована под теми же углами, ось с наклонена под углом (εv+π/2) к плоскости, проходящей через ось а и параллельной меридианальной с углом βv, а ось b при отсутствии собственного крена объекта будет лежать в плоскости, параллельной экваториальной, и иметь угол поворота относительно оси К, равный (βv+π/2). Угол между плоскостью (x, y) и осью b определяется углом между осью b и ее проекцией на указанную плоскость. Так как угол между экваториальной и картинной плоскостями равен (εc+π/2), угол между осью x и осью К равен (βc-π/2), а следовательно, угол между осью b и осью x равен (βc-βv-π), проекции b на оси картинной плоскости (x, y) можно представить как:

Зная bx, by, легко определить величину проекции b на плоскость (x, y), например, как:

Таким образом, по проекции и исходному значению определяется угол ψо:

Для каждого типового объекта значения углов εv, ψo могут быть скорректированы на априорно известные или наиболее вероятные в зависимости от выполняемого маневра значения угла атаки и собственного угла крена объекта ψ. При этом осуществить завязку траектории на основании получаемой информации о положении линии визирования и дальности до объекта можно, например, по методам, изложенным в [9].
Итак, из (1) могут быть получены значения проекций в картинной плоскости характерных точек, искажающих образ объекта, а по ним и необходимые угловые поправки:

где Δεк, Δβк - угловые поправки на искажения образа в картинной плоскости;
xo, yo - координаты в картинной плоскости точки, соответствующей началу координат ДОСК.
Получив поправки, можно добавить их к координатам изображения в стабилизированной системе координат и уточнить значение положения проекции геометрического центра или иной точки объекта относительно картинной плоскости в стабилизированной СК. Переход от измерительной к стабилизированной картинной системе координат может быть произведен, например, по зависимостям:

где δε, δβ - сигналы рассогласования в измерительной системе координат;
δεc, δβc - сигналы рассогласования в стабилизированной системе координат;
χ - угол скрутки измерительной системы координат, см. [10], стр.138.
Следует обратить внимание на частный случай, когда поперечная и вертикальная координаты в ДОСК существенно меньше, чем продольная. В этом случае, полагая составляющие от с и b в уравнениях (1) равными нулю, из (1), (2), (3), (9) можно получить соотношения:
Из сказанного видно, что операция определения величины и направления линейной скорости объекта в стабилизированной системе координат заключается в выполнении алгебраических и тригонометрических действий в соответствии с зависимостями (3а) и (2), а операция формирования величины углового смещения в стабилизированной картинной плоскости - в соответствии с зависимостями (4)-(8), (1) и (9).
Таким образом, повышение точности определения координат движущихся объектов с известным расположением искажающих геометрический образ элементов достигается за счет уточнения координат пеленгуемого изображения после пересчета их на положение в стабилизированной картинной плоскости на величину угла, под которым видны проекции искажающих геометрический образ элементов на ту же плоскость относительно проекции точки начала координат собственной СК объекта, и при этом для определения ориентации ДОСК относительно картинной плоскости используется информация об ориентации и величине линейной скорости объекта, рассчитываемая, например, исходя из дальности до объекта и угловых скоростей линии визирования на объект в стабилизированной системе координат.
Все используемые для реализации заявляемого устройства блоки являются известными либо могут быть реализованы на базе известных блоков известными методами.
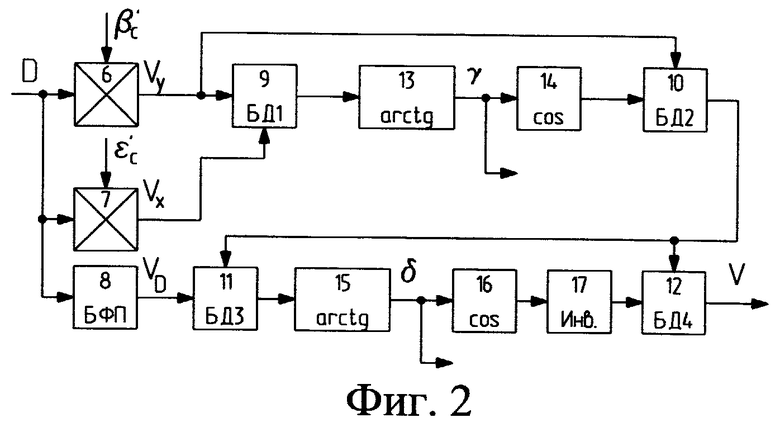
Оптико-электронный пеленгатор и преобразователь из измерительной в стабилизированную систему координат могут быть использованы аналогичными прототипу. Возможные варианты реализации блока определения линейной скорости объекта и блока формирования величины углового смещения на базе таких известных устройств, как делители, перемножители, нелинейные устройства, инверторы и блоки формирования производной, изображены на фиг.2, фиг.4.
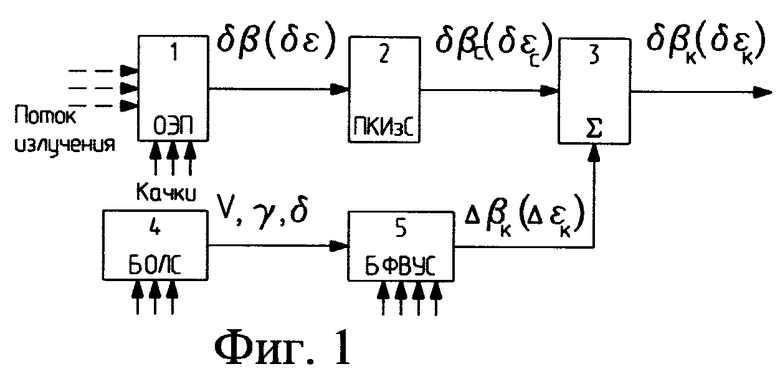
Для пояснения устройства и работы следящей системы приводятся иллюстрации: на фиг.1 изображена функциональная схема оптико-электронного устройства (для одного канала); на фиг.2 - блок-схема для формирования сигнала линейной скорости объекта; на фиг.3 - преобразователь для расчета угла скрутки измерительной системы координат относительно стабилизированной; на фиг.4, - вариант функциональной схемы блока формирования величины углового смещения; на фиг.5 - изображение, поясняющее связь между системами координат; на фиг.6 - вариант упрощенной функциональной схемы блока формирования величины углового смещения.
Оптико-электронное устройство (см. фиг.1) содержит последовательно соединенные оптико-электронный пеленгатор (ОЭП) 1 и преобразователь из измерительной в стабилизированную систему координат 2, последовательно соединенные блоки определения линейной скорости объекта (БОЛС) 4, блок формирования величины углового смещения (БФВУС) 5 и сумматор 3, второй вход которого соединен с выходом ПКИзС.
При описании работы предлагаемого устройства предполагается, что передача однородных массивов данных (элементов видеосигнала, релейных команд, наборов координат) осуществляется по каналам связи (шинам), использующим, например, временное, частотное, кодовое разделение сигналов, т.е. того или иного рода мультиплексирование. Кроме того, поскольку аппарат, обеспечивающий синхронизацию работы устройства, может находиться как в любом из его блоков, так и быть конструктивно выделенным, этот аспект работы в дальнейшем не рассматривается и подразумевается, что работа блоков синхронизирована. Следует также отметить, что входы и выходы блоков показаны как функциональные, физически же реализация блоков может иметь от одного (и более) входа-выхода, например, соединенного с общей шиной данных или многоабонентским мультиплексным каналом обмена, или локальной сетью, объединяющей блоки, и т.п. Если особо не оговорено, подразумевается, что информация (сигналы, команды и т.п.), не вырабатываемая данным каналом, поступает на его блоки (субблоки) из надсистемы, в которую входит рассматриваемое устройство, и второго канала устройства.
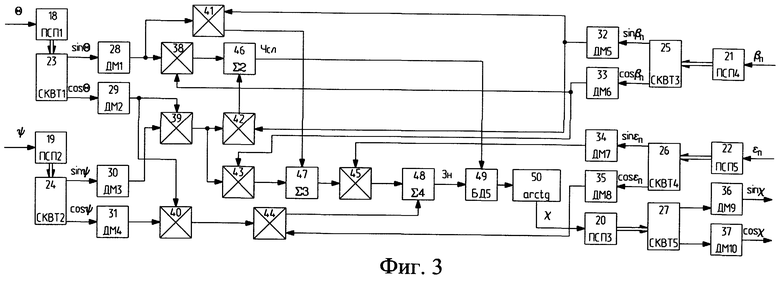
Работа устройства осуществляется следующим образом (рассматривается канал по одному направлению, работа второго канала аналогична). Пусть в процессе сопровождения объекта поток излучения от него попадает на входной зрачок оптико-электронного пеленгатора 1. Производится обработка изображения, сформированного на фотоприемнике оптической системой пеленгатора, по результатам которой выдаются координаты положения изображения относительно растра развертки изображения. Так как определение координат изображения осуществлено в измерительной системе пеленгатора, то возникает необходимость в пересчете этих координат в отклонения от центра поля зрения в стабилизированной системе. Этот пересчет производится в преобразователе координат 2 по зависимостям (10). ПКИзС по исполнению аналогичен описанному в [4] и [7] за исключением того, что отсутствует субблок деления на косинус угла. Блок-схема определения угла скрутки χ, а также синуса и косинуса от него приведена на фиг.3. Эта схема предполагает использование электромеханических устройств: позиционных следящих приводов (ПСП) и синусно-косинусных вращающихся трансформаторов (СКВТ). В ее состав входят ПСП 18-22, СКВТ 23-27, демодуляторы (ДМ) 28-37, перемножители 38-45, сумматоры 46-48, блок деления (БД) 49, нелинейный блок 50, реализующий нелинейность типа арктангенса. Нелинейность может быть выполнена, например, как кусочно-линейная по методам, приведенным в [11]. ПСП и СКВТ и их использование для преобразователей координат описаны, в частности, в [10]. Реализация блоков деления, перемножителей, демодуляторов раскрыта в [12]. В качестве входных сигналов для схемы формирования угла χ используются значения стабилизированных углов оптической оси пеленгатора βп, εп, а также углов тангажа и крена носителя θ, ψ.
Однако, как указывалось ранее, координата, полученная путем только обработки сигнала от изображения, не будет точно отражать положения объекта в пространстве, если имеются образования, искажающие его геометрический образ. Чтобы учесть эти искажения, должны быть проведены операции определения величины и ориентации вектора скорости движущегося объекта и собственно расчет необходимых поправок. Первая операция выполняется в блоке 4 определения линейной скорости. Общий случай реализации этого блока (один из возможных вариантов) приведен на фиг.2. Входными сигналами для него служат дальность до объекта D, и стабилизированные угловые скорости  . В состав блока входят перемножители 6, 7, блок формирования производной (БФП) 8, блоки деления 9-12, нелинейные блоки 13-16 и инвертор (блок, изменяющий знак входного сигнала) 17. Приведенная блок-схема представляет собой лишь один из возможных вариантов, в частности потому, что в блоках 13 и 15 нелинейность типа тангенса может быть заменена на нелинейность типа котангенса при перемене мест числителя и знаменателя соответственно в блоках деления 9 и 11 (либо с целью снятия неопределенности могут быть применены две пары соответствующих БД и нелинейностей с логическим устройством, обеспечивающим исключение принятия во внимание результата деления на ноль). Структура может также измениться в результате применения иной последовательности решения уравнений (2). Итак, в перемножителях 7, 6 путем умножения дальности на соответствующие угловые скорости получают проекции линейной скорости на стабилизированную картинную плоскость в меридианальном и ортогональном ему направлениях. В первом блоке деления 9 поперечная составляющая Vx с выхода блока 7 делится на меридианальную Vy с выхода блока 6. Частным от деления является тангенс угла γ, определяющего ориентацию проекции вектора скорости относительно системы координат картинной плоскости. Поэтому нелинейность типа арктангенса при подаче на вход блока 13 сигнала с выхода БД 1 даст на своем выходе величину угла γ. На выходе нелинейного блока 14 при подаче на его вход сигнала с выхода блока 13 получается косинус угла γ. Блок 14 (и по аналогии блок 16) может быть реализован, например на операционном усилителе как кусочно-линейная последовательность, на базе постоянного запоминающего устройства (ПЗУ), входная величина которого в виде кода угла определяет адрес ячейки, в которой записано значение соответствующей тригонометрической функции (по такому же принципу могут быть реализованы и блоки 13, 15), а также в форме последовательности из ПСП, СКВТ и ДМ (см., например, блоки 18, 23, 29 на фиг.3). Во втором блоке деления 10 меридианальная составляющая линейной скорости объекта Vy с выхода перемножителя 6 делится на выходную величину блока 14. С выхода БД2 сигнал поступает на третий блок деления 11, где выступает в качестве делителя. На другой вход БДЗ поступает сигнал, пропорциональный скорости сближения объекта с пеленгатором 1. Он может быть получен как производная от дальности в блоке 8 либо из внешней системы, например доплеровского локатора. Выходной сигнал с блока 11, соответствующий частному, будет пропорционален тангенсу угла δ (между картинной плоскостью и вектором скорости). Поэтому по аналогии со сказанным про блоки 9, 13 на выходе нелинейного блока 15, реализующего функцию арктангенса, будет сформирован сигнал пропорциональный углу δ. С выхода блока 15 сигнал поступает на вход нелинейного блока 16, реализующего функцию косинуса. Чтобы получить скалярное значение линейной скорости, нужно, например, поделить выходную величину БД2 (-V·cosδ) на cosδ. Естественно, при этом должен быть изменен знак выходной либо одной из входных величин, в частности за счет использования коэффициента передачи минус единица по одному из входов или выходу БД. На фиг.2 инвертор 17 показан установленным между четвертым блоком деления 12 и нелинейным блоком 16. Еще один вход БД4 соединен с выходом второго блока деления 10. Тогда на выходе четвертого блока деления 12 будет сформирован сигнал, пропорциональный скаляру линейной скорости объекта. Блок определения линейной скорости 4 может быть также дополнен мультиплексором (на фиг.2 не указан), входы которого соединены с выходами блоков 12, 13, 15, а выход является выходом блока 4. При необходимости через мультиплексор в дополнение к сигналам V, δ, γ могут быть выданы также сигналы Vy, Vx, vd с выходов блоков 6, 7, 8.
. В состав блока входят перемножители 6, 7, блок формирования производной (БФП) 8, блоки деления 9-12, нелинейные блоки 13-16 и инвертор (блок, изменяющий знак входного сигнала) 17. Приведенная блок-схема представляет собой лишь один из возможных вариантов, в частности потому, что в блоках 13 и 15 нелинейность типа тангенса может быть заменена на нелинейность типа котангенса при перемене мест числителя и знаменателя соответственно в блоках деления 9 и 11 (либо с целью снятия неопределенности могут быть применены две пары соответствующих БД и нелинейностей с логическим устройством, обеспечивающим исключение принятия во внимание результата деления на ноль). Структура может также измениться в результате применения иной последовательности решения уравнений (2). Итак, в перемножителях 7, 6 путем умножения дальности на соответствующие угловые скорости получают проекции линейной скорости на стабилизированную картинную плоскость в меридианальном и ортогональном ему направлениях. В первом блоке деления 9 поперечная составляющая Vx с выхода блока 7 делится на меридианальную Vy с выхода блока 6. Частным от деления является тангенс угла γ, определяющего ориентацию проекции вектора скорости относительно системы координат картинной плоскости. Поэтому нелинейность типа арктангенса при подаче на вход блока 13 сигнала с выхода БД 1 даст на своем выходе величину угла γ. На выходе нелинейного блока 14 при подаче на его вход сигнала с выхода блока 13 получается косинус угла γ. Блок 14 (и по аналогии блок 16) может быть реализован, например на операционном усилителе как кусочно-линейная последовательность, на базе постоянного запоминающего устройства (ПЗУ), входная величина которого в виде кода угла определяет адрес ячейки, в которой записано значение соответствующей тригонометрической функции (по такому же принципу могут быть реализованы и блоки 13, 15), а также в форме последовательности из ПСП, СКВТ и ДМ (см., например, блоки 18, 23, 29 на фиг.3). Во втором блоке деления 10 меридианальная составляющая линейной скорости объекта Vy с выхода перемножителя 6 делится на выходную величину блока 14. С выхода БД2 сигнал поступает на третий блок деления 11, где выступает в качестве делителя. На другой вход БДЗ поступает сигнал, пропорциональный скорости сближения объекта с пеленгатором 1. Он может быть получен как производная от дальности в блоке 8 либо из внешней системы, например доплеровского локатора. Выходной сигнал с блока 11, соответствующий частному, будет пропорционален тангенсу угла δ (между картинной плоскостью и вектором скорости). Поэтому по аналогии со сказанным про блоки 9, 13 на выходе нелинейного блока 15, реализующего функцию арктангенса, будет сформирован сигнал пропорциональный углу δ. С выхода блока 15 сигнал поступает на вход нелинейного блока 16, реализующего функцию косинуса. Чтобы получить скалярное значение линейной скорости, нужно, например, поделить выходную величину БД2 (-V·cosδ) на cosδ. Естественно, при этом должен быть изменен знак выходной либо одной из входных величин, в частности за счет использования коэффициента передачи минус единица по одному из входов или выходу БД. На фиг.2 инвертор 17 показан установленным между четвертым блоком деления 12 и нелинейным блоком 16. Еще один вход БД4 соединен с выходом второго блока деления 10. Тогда на выходе четвертого блока деления 12 будет сформирован сигнал, пропорциональный скаляру линейной скорости объекта. Блок определения линейной скорости 4 может быть также дополнен мультиплексором (на фиг.2 не указан), входы которого соединены с выходами блоков 12, 13, 15, а выход является выходом блока 4. При необходимости через мультиплексор в дополнение к сигналам V, δ, γ могут быть выданы также сигналы Vy, Vx, vd с выходов блоков 6, 7, 8.
Для частного случая, когда величина а существенно больше b и с, формирование скаляра скорости удобнее осуществлять по зависимости (2а), так как знание углов δ и γ в этом случае необязательно. Знак линейной скорости при этом может быть получен из внешней системы, например, в результате анализа интерполированной (завязанной) траектории, полученной, в частности, по методам, указанным в [9].
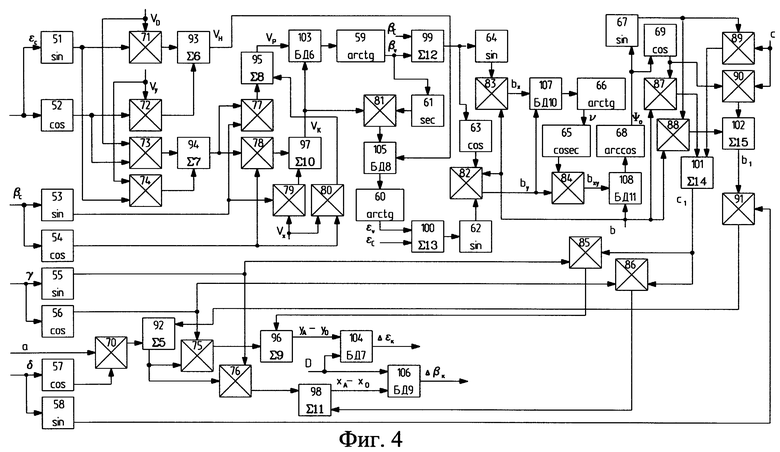
С выхода БОЛС сигнал (совокупность сигналов), определяющий линейную скорость объекта, поступает на вход блока 5 формирования величины углового смещения. Блок-схема БФВУС приведена на фиг.4. По причинам, аналогичным указанным для БОЛС, это также лишь один из возможных вариантов построения блока. БФВУС состоит из нелинейных блоков 51-69, перемножителей 71-91, сумматоров 92-102, блоков деления 103-108. В состав блока 5 может также входить демультиплексор (на фиг.4 не показан), на вход (входы) которого поступают мультиплексированные тем или иным образом сигналы от БОЛС и надсистемы, в состав которой входит оптико-электронное устройство, а выходы связаны со входами блоков, использующих соответствующие демультиплексированные сигналы. Входными сигналами для БФВУС, помимо поступающих из БОЛС, являются также стабилизированные углы εc, βc, дальность до объекта D, координаты линейного смещения в ДОСК а, b, с. Здесь же следует отметить, что сигналы Vd, Vy, Vx не только могут быть получены из БОЛС, но и сформированы в БФВУС по зависимостям (2) из V, δ, γ. В БФВУС 5 блоки 51-54, 71-74, 77-80, 93-95, 97 используются для реализации зависимостей (4). При этом нелинейные блоки, реализующие синусоидальную зависимость, могут быть выполнены аналогично ранее описанной реализации косинусоидных блоков (при электромеханической реализации см., например, фиг.3, блоки 18, 23, 28). Зависимости (5) реализуются с помощью блоков 103, 59, 61, 81, 105, 60. При этом в шестом блоке деления 103 в качестве делимого выступает сигнал с восьмого сумматора 95 (VP), а в качестве делителя - сигнал с выхода десятого сумматора 97 (Vк). В восьмом блоке деления 105 делителем служит сигнал с перемножителя 81, а делимым - сигнал с выхода шестого сумматора 93 (VH). Нелинейный блок 61, реализующий секансную нелинейность может быть выполнен теми же методами, что и ранее предлагались для реализации арктангенциальной нелинейности, а также путем взятия обратной величины от косинуса входного сигнала (реализация нелинейности типа косинус уже рассматривалась). Для реализации формул (6) используются блоки 99, 64, 83, 100, 62, 82, при этом необходимое инвертирование может быть осуществлено за счет коэффициентов передачи на соответствующих сумматорах или перемножителях. Блоки 107, 66, 65, 84, 108, 68 реализовывают зависимости (7). При этом в десятом блоке деления 107 в качестве делимого выступает выходная величина перемножителя 83, а делителя - выходной сигнал с перемножителя 82. Косекансная нелинейность блока 65 реализуется теми же методами, что и секансная блока 61, с тем уточнением, что при необходимости обратная величина должна браться от синуса входного сигнала. Формулы (8) реализованы на блоках 108 и 68. Делимым в одиннадцатом блоке деления 108 является выходной сигнал с перемножителя 84, а делителем - входной сигнал по координате b. Нелинейность типа арккосинус может быть реализована в блоке 68 методами, аналогичными указанным для реализации арктангенциальной зависимости. Определение величин проекций на картинную плоскость по зависимостям (1) производится в блоках 55-58, 70, 92, 75, 76, 67, 89, 69, 87, 101, 90, 88, 102, 91, 85, 86, 96, 98. Упрощенный вариант зависимостей (9) реализовывается на делителях 104 (для меридианального канала) и 106 (для поперечного канала). В качестве делителя в седьмом 104 и девятом 106 блоках деления применяется сигнал о дальности до объекта, а в качестве делимого используются сигнал с выхода девятого сумматора 96 для БД7 и с выхода одиннадцатого сумматора 98 для БД9. Соответственно, при рассмотрении меридианального канала выходом БФВУС будет выход седьмого блока деления, а при рассмотрении поперечного канала - выход девятого блока деления. Так как определение углового смещения возможно только для априори известного объекта, то, когда тип объекта не определен, из внешней системы выдаются нулевые значения а, b, с, естественно, величина поправок при этом будет тоже нулевая.
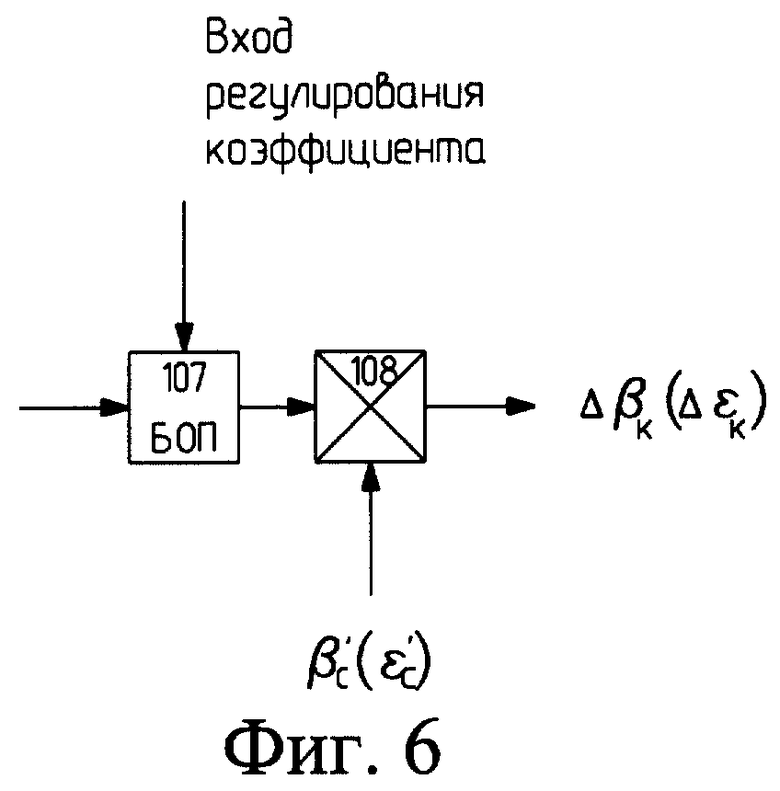
Как уже отмечалось, на практике представляет интерес частный случай, когда продольная координата образований, искажающих геометрический образ объекта, в его ДОСК существенно больше двух других координат. Функциональная схема блока формирования величины углового смещения для такого варианта резко упрощается. Предлагается выполнить его в виде последовательно соединенных блока обратной пропорциональности (БОП) 107 и блока умножения 108 (см. фиг.6). Причем вход блока обратной пропорциональности и выход блока умножения соединены соответственно со входом и выходом блока формирования величины углового смещения, а второй вход блока умножения является входом угловой скорости. Преимуществом такого исполнения является то, что в блоке обратной пропорциональности, представляющем собой разновидность блока деления, где делимое является константой, выполняется операция нахождения частного (a/V). Во-первых, изменение а (значения коэффициента по входу блока) осуществляется только при изменении типа сопровождаемого объекта, если объект не опознан, коэффициент может быть принят равным нулю. Во-вторых, в обоих каналах коэффициент и входная величина идентичны, поэтому один блок может работать на оба канала. Умножение выходной величины блока обратной пропорциональности осуществляется в блоке умножения на стабилизированную угловую скорость линии визирования по соответствующему каналу.
Заключительной операцией определения координаты объекта является алгебраическое суммирование в блоке 3 сигналов поправки с выхода блока формирования величины углового смещения 5, поступающей на первый вход сумматора 3, и стабилизированного угла изображения, поступающего с выхода преобразователя из измерительной в стабилизированную систему координат 2 на второй вход сумматора.
Итак, применение в оптико-электронном устройстве способа, заключающегося в определении параметров линейной скорости движущегося объекта, формирования на их базе угловой поправки, определении координаты изображения в нестабилизированной картинной плоскости и пересчете ее в стабилизированную, а также корректировки стабилизированной координаты на величину поправки, позволяет повысить точность определения координаты изображения геометрического центра (или другой характерной точки) движущегося объекта.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Госсорг Ж. “Инфракрасная термография. Основы, техника, применение”, пер. с франц. - М., “Мир”, 1988 г.
2. Патент Российской Федерации № 2197070, МПК7 Н 04 N 7/18, 2000 г., аналог.
3. А.с. СССР № 1019673, МКИ H 04 N 7/18, 1982, аналог.
4. Патент Российской федерации № 2172010, МПК7 G 05 D 3/12, 2000 г., прототип.
5. Максимов М.В., Горгонов Г.И. “Радиоэлектронные системы самонаведения”, М., “Радио и связь”, 1982 г., стр.228, 229, рис.6.7, аналог.
6. Барсуков Ф.И., Величкин А.И., Сухарев А.Д. “Телевизионные системы летательных аппаратов”, М., “Советское радио”, 1979 г., стр.232, рис.7.17, аналог.
7. Патент Российской федерации № 2168753, МПК7 G 05 D 3/12, 2000 г., прототип.
8. Селезнев В.П. “Навигационные устройства”, изд-е 2-е, перераб. и доп., М., “Машиностроение”, 1974 г.
9. Патент Российской федерации № 2191407, МПК7 G 01 S 17/66, G 05 D 3/12, H 04 N 7/18, 2000 г.
10. Ривкин С.С. “Стабилизация измерительных устройств на качающемся основании”, М., “Наука”, 1978 г.
11. Тетельбаум И.И., Шнейдер Ю.Р. “400 схем для АВМ”, М., “Энергия”, 1978 г.
12. “Применение интегральных микросхем. Практическое руководство”, под ред. А.Уильямса, книга 1, М., “Мир”, 1987 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ КОСМИЧЕСКОГО ОБЪЕКТА | 2006 |
|
RU2319172C1 |
| СЛЕДЯЩАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 2003 |
|
RU2248009C2 |
| СЛЕДЯЩАЯ СИСТЕМА | 2003 |
|
RU2252435C2 |
| СЛЕДЯЩАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 2001 |
|
RU2211462C2 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2007 |
|
RU2364886C1 |
| КОМБИНИРОВАННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2389041C2 |
| ИНТЕГРИРОВАННАЯ НАБЛЮДАТЕЛЬНАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2007 |
|
RU2327188C1 |
| ИНТЕГРИРОВАННАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ АВТОМАТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2321020C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ПОИСКА И СОПРОВОЖДЕНИЯ | 2001 |
|
RU2212687C2 |
Изобретение относится к области систем слежения за подвижными объектами, в том числе с подвижного основания, и может быть использовано в оптических системах промышленного назначения, навигационных системах, системах слежения за космическими объектами, системах управления заходом на посадку и других системах аналогичного назначения. Техническим результатом предлагаемого решения является повышение точности определения координат оптико-электронным устройством. Способ заключается в определении угловой координаты изображения объекта вместе с изменяющими образ элементами в поле зрения и последующем пересчете полученной величины в стабилизированную систему координат, определении величины и направления линейной скорости объекта в стабилизированной системе координат, формировании величины углового смещения в стабилизированной картинной плоскости исходя из полученной величины и координат, характеризующих линейное смещение изменяющих образ элементов относительно собственной системы координат объекта, и корректировке угловой координаты изображения объекта вместе с искажающими образ элементами в стабилизированной системе координат на величину углового смещения. Оптико-электронное устройство содержит последовательно соединенные оптико-электронный пеленгатор и преобразователь из измерительной в стабилизированную систему координат, последовательно соединенные блок определения линейной скорости объекта, блок формирования величины углового смещения и сумматор, второй вход которого соединен с выходом преобразователя из измерительной в стабилизированную систему координат. 2 н. и 2 з.п. ф-лы, 6 ил.
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ | 2000 |
|
RU2172010C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СЛЕДЯЩАЯ СИСТЕМА | 2000 |
|
RU2168753C1 |
| US 6163372 A, 19.12.2000 | |||
| Устройство коррекции кинематических цепей | 1959 |
|
SU125722A1 |
| US 6122572 А, 19.09.2000. | |||

