1
Изобретение относится к вычислительной технике и может быть использовано в робототехнических системах.
Известно вычислительное устройство, для управления манипулятором, содержащее аналоговые механические вычислители 1 ,
Однако применение устройства ограничено в виду громоздкости, сложности и узких функциональных возможностей вычислителей.
Наиболее близким техническим решением к предлагаемому изобретению является устройство, содержащее последовательно соединенные генератор синусоидального сигнала, формирователь пилообразного напряжения, первый компаратор и первый элемент памяти, второй вход которого подключен ко второму выходу генератора синусоидального сигнала, третий выход которого соединен с первым входом второго элемента памяти, второй вход которого подключен к выходу первого компаратора, вторым входом соединенного с первым входом устройства. Это устройство позволяет решать задачи преобразования координат для плоских однозвенных механизмов Г2.
Однако даже комбинацией подобных устройств не удается решить задачу преобразования командных движений охвата многозвенного пространственного манипулятора в команды управления исполнительными приводами и тем самым обеспечить разложение движений манипуляционного робота. С другой стороны, это устройство не
0 позволяет выполнить обратные преобразования координат и функциональные преобразования, необходимые для управления многозвенными манипуляционными механизмами.
5
Цель изобретения - расширение функциональныхвозможностей устройства.
Поставленная цель достигается тем, что устройство содержит пять сумма0торов и три функциональных преобразователя, причем выход формирователя пилообразного напряжения соединен с первыми входами функциональных преобразователей, вторые входы которых
5 подключены ко второму выходу генератора синусоидсшьного сигнала, третий выход которого соединен с третьим входом третьего функционального преэбразователя, второй, третий и чет0вертый входы устройства подключены
соответственно к третьему и четвер.тому входам первого функционального преобразователя и к первому входу первого сумматора, второй вход которого соединен с выходом первого элемента памяти,- авыход - с третьим входом второго функционального преобразователя, четвертый вход которого подключен к выходу второго сумматора, первый вход которого соединен с выходом второго элемента памяти, а второй вход - с первым выходом первого функционального преобразователя, второй выход которого является первым выходом устройства, четвертый вход третьего функционального преобразователя подключен к первому выход второго функционального преобразователя, первый выход - к соответствующим входам третьего и четвертого сумматоров , а второй выход - ко второму входу четвертого сурлматора и первому входу пятого сумматора, второй вход которого соединен со вторым входом первого компаратора, а третий вход - со вторым входом третьего сумматора и вторым выходом второго функционального преобразователя, а выходы третьего, четвертого и пятого сумматоров подключены соответственно ко второму, третьему и четвертому выхрдам устройства, а также то, что первый и второй функциональные преобразователи содержат фазосдвигающий блок и последовательно, соединенные шестой сумматор, первый интегратор, модулятор, фильтр низкой частоты и третий элемент памяти, а также последовательно соединенные седьмой сумматор, второй интегратор, второй компаратор, четвертый элемент памяти .второй вход которого через фазосдвигающий блок подключен к выходу фильтра низкой частоты, а выход - к первому входу седьмого сумматора,.второй вход третьего элемента памяти соединен с выходом второго компаратора, а выход - с первым входом шестого сумматора, причем вторые входы второго компаратора, модулятора, шестого и седьмого сумматоров подключен соответственно к первому, второму, третьему и четвертому входам преобразователей, а выходы первого и второго интеграторов - к первым и вторым выходам преобразователей, а также то, что третий функциональный преобразователь содержит пятый и шестой элементы памяти и последовательно соединенные восьмой сумматор, третий интегратор, третий компаратор и седьмой элемент памяти, а также последовательно соединенные восьмой элемент памяти, девятый сумматор, четвертый интегратор и четвертый компаратор, второй вход которого подключен к одноименному входу первого компаратора а выход - к первым входам пятого и шестого элемента памяти, выход третьего компаратора соединен с первым, входом восьмого элемента памяти, второй вход которого подключен к одноименному входу шестого элемента Пс1мяти, выход которого соединен со вторы входом девятого сумматора, второй вход пятого элемента памяти подключен к одноименному входу седьмого элемента памяти, а выход - к перво.му входу восьмого сумматора, второй вход которого соединен с выходом седьмого элемента памяти, причем вторые входы третьего компаратора, шестого элемента памяти, пятого эле.мента памяти и третий вход восьмого сумматора подключены соответственно к первому, второму, третьему и четвертому входам преобразователя, а выходы третьего и четвертого интеграторов - к первому и второму выходам преобразователя.
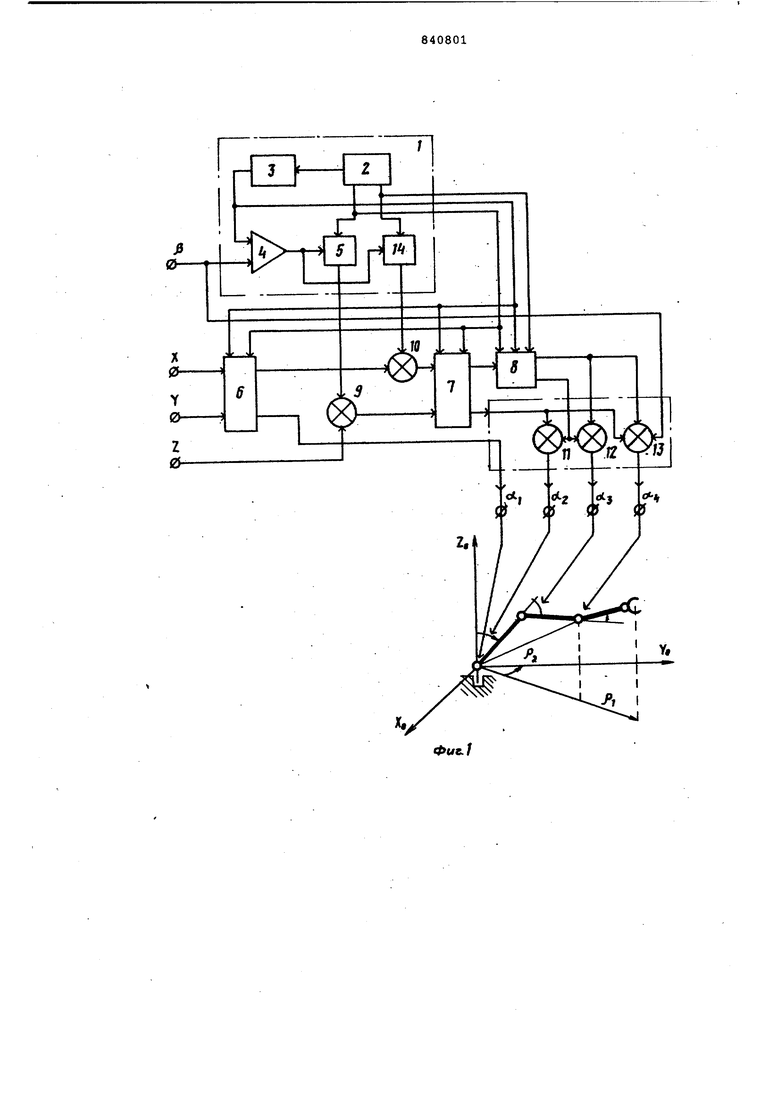
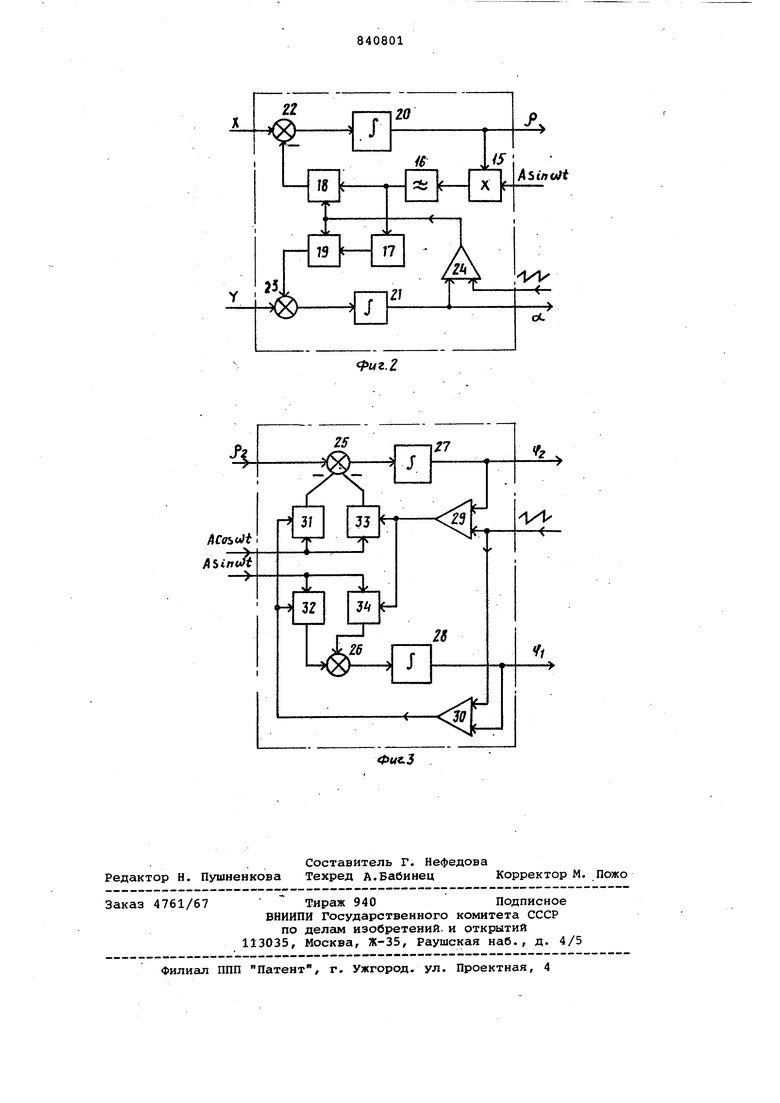
На фиг. 1 изображена функциональная схема вычислительного устройства; на фиг. 2 - функциональная схема первого и второго функциональных преобразователей; на фиг. 3 - функциональная схема третьего функционального преобразователя.
Устройство содержит преобразователь 1 полярных координат в декартовые, генератор 2 синусоидального сигнала, формирователь 3 пилообразного напряжения, первый компаратор 4, первый элемент памяти, первый, второй и третий функциональные преобразо ватели 6-8 соответственно, перйый, второй, третий, четвертый и пятый сумматоры 9-13 соответственно, второй элемент 14 памяти }, X , Y ., Z - входные сигналы dj о(„ ol.y,t команды управления приводами манипулятора С t Еп я длины звеньев манипулятора, - неподвижная система координат; модулятор 15, фильтр 16 низкой частоты, фазосдвигающий блок 17, третий и четвертый элементы памяти 18 и 19 соответственно, первый и второй интеграторы 20 и 21 соответственно, шестой и седьмой сумматоры 22 и 23 соответственно, второй компаратор 24 р и оС- выходные сигналы преобразователя, восьмой и девятый сумматоры 25 и 26 соответственно, третий и четвертый интеграторы 27 и 28 соответственно, третий и четвертый компараторы 29 и 30 соответственно, пятый, шестой, седьмой и восьиюй элементы памяти 31-34 соответственно, P/f и выходные сигналы преобразователя.
Устройство работает следующим образом.
Входные сигналы j3 и задают соответственно ориентацию и положени схвата манипулятора в неподвижной системе координат OXpYoZp, На втором и третьем выходах генератора 2 синусоидального сигнала вырабатываются сигналы А sin cot и А cos cot с амплитудой А и частотой ш, которая явл ется синхронизирующей для формирова теля 3 пилообразного напряжения. Пр подаче на первый вход устройства входного сигнала р в момент времени его равенства с пилообразным напряжением на входах первого компаратора 4 по сигналу этого компаратора на выходах элементов памяти 5 и 14 фиксируются мгновенные значения напряжений А S i п (Ь и А cosfi, которые поступают соответственно .на второй и первый входы сумматоров 9 и 10. Входные сигналы X, У поступают на вход первого функционального преобразователя 6, формирующего напряжения, пропорциональные полярному радиусу i и команде управления - углу При этом на входах второго функционального преобразователя 7 формируются сигналы двух координат ,cos Р) и /3, а на его выходах - напряжения, пропорционгшьны углу Ч и полярному радиусу р. Сигнал, пропорциональный p/j поступает на-вход третьего функционального пр образователя 8, который решает зада чу определения по известным сторона треугольника Е-| , В и УГЛОВ Фи и , заключенных между g, р,,, и 6, р соотретствен 1О. Полученные значения углов % , «/2/ f и Р позволяют определить .с помощью сумг аторов 11-13 команды управления of.i (P+ V) , 4/f + fiH 4 р + 2 - Приводы манипулятора, от1рабатывая найденные команды, приводят схват манипулятор в положение, соответствующее входны сигналам. Принцип действия первого и второ го функциональных преобразователей 6 и 7 сводится к следующему. При по ступлении входных сигналов X и У н.а выходах интеграторов 20 и 21 выраба тываются напряжения, пропорциональные полярным координатам О и с при Vс, - - -А чем р , oL arc tg у . Ука занные преобразования реализуются благодаря охвату интеграторов отрицательными обратными связями через элементы памяти 18 и 19. На выходах этих элементов фиксируются соответственно значения р s i п cd. и pcos ot в моменты времени, когда на входах компаратора 24 совпадают по значению пилообразное напряжение и напряжение пропорциональное углу od. Формирование значений psInoJ. и рcosoJ.осущест вляется с помощью модулятора 15, на входы которого поступают синусоидаль НО6 напряжение и напряжение, пропорциональное полярному радиусу р, филь ра 16 и фазосдвигающего блока 15. Третий функциональный преобразователь 8 работает следующим образом. При подаче на третий вход сумматора 25 напряжения, пропорционального зна чению р2. f на выходах интеграторов 27 и 28 устанавливаются такие значения напряжений, пропорционашьные углам Ра и -t , что на выходах сумматоров 25 и 26 реализуются равенства Pg cos %i.ezcos Y2ie4sin«p e sinPjiПри этом на выходах элементов памяти 31 и 32 в момент равенства на входах компаратора 30 пилообразного напряжения и напряжения, пропорционального углу f, фиксируются мгновенные значения напряжений, пропорциональные величинам if и s 1 . Они поступают на первый вход сумматора 25 и второй вход сумматора 26 соответственно. Аналогичным образом на выходах элементов памяти 33 и 34 формируются напряжения, пропорциональные значениям «P/j и Cg sinfg, которые поступают соответственно на второй вход сумматора 25 и первый вход сумматора 26. Применение изобретения позволяет наиболее простыми техническими средствами осуществить разложение движений манипулятора, т.е. преобразование командных движений схвата мгновенного пространстйенного манипулятора в сигналы управления исполнительными приводами. Формула изобретения 1. Вычислительное устройство для управления манипулятором, содержащее последовательно соединенные генератор синусоидального сигнала, формирователь пилообразного напряжения, первый компаратор и первый элемент памяти, второй вход которого подключен ко второму выходу генератора синусоидального си гнала,третьим выходом соединенного с первым входом второго элемента памяти, второй вход которого подключен к выходу первого компаратора, вторым входом соединенного с первым входом устройства, отличающееся тем, что, с целью расширения функциональных возможностей устройства, оно содержит пять сумматоров и три функциональных преобразователя, причем выход формирователя пилообразного напряжения соединен с.первыми входами функциональных- преобразователей, вторые входы которых подключены ко второму выходу генератора синусоидашьного сигнала, третий выход которого соединен с третьим входом третьего функционального преобразователя, второй, третий, и четвертый входы устройства подключены соответственно к третьему и четвертому входам первого функционального преобразователя и первому входу первого сумматора, второй вход которого соединен с выходом первого элемента памяти., а выход - с третьим входом второго функционального преобразователя, четвертый вход
которого подключен к выходу второго сумматора, первый- вход которого соединен с выходом второго эле мента памяти, а второй вход - с первым выходом первого функционального преобразователя, второй выход которого является первым выходом устройства, четвертый вход третьего функционального преобразователя подключен к,. первому выходу второго функционального преобразователя, первый выход - к соответствующим входам третьего и четвертого сумматоров, а второй выход - ко второму входу четвертого сумматора и первому входу пятого сумматора, второй вход которого соединен со вторым входом первого сумматора, а третий вход - со вторым входом третьего сумматора и вторым выходом второго функционального преобразователя, а выходы третьего, четвертого и пятого сумматоров подключены соответственно.ко второму, третему и четвертому выходам устройства. 2. Устройство по п. 1, отличающееся тем, что первый и второй функциональные преобразователи содержат фазосдвигснощий блок и последовательно соединенные шестой сумматор, первый интегратор, модулятор, фильтр низкой частоты и третий элемент памяти, а также последовательно соединенные седьмой сумматор, второй интегратор, второй компаратор, четвертый элемент памяти, второй вход которого через фазосдвигающий блок подключен к выходу фильтра низкой частоты, а выход - к первому входу седьмого сумматора, второй вход третего элемента памяти соединен с выходом второго компаратора, а выход - с первым входом шестого сумматора, причем вторые входы второго компаратора, модулятора, шестого и седьмого сумматоров подключены соответственнок первому, второму, третьему и четвертому входам преобразователей, а
выходы первого и второго интеграторов - к первым и вторым выходам преобразователей .
3. Устройство по п. 1, отличающееся тем, что третий функциональный преобразователь содержит пятый и шестой элементы памяти и последовательно соединенные восьмой сумматор, третий интегратор, третий компаратор и седьмой элемент памяти, а также последовательно соединенные восьмой элемент памяти, девятый сумматор, четвертый интегратор и четвертый компаратор, второй вход которого подключен к одноименному входу первого компаратора, а выход - к первым входам пятого и шестого элементов памяти, выход третьего компаратора соединен с первым входом восьмого элемента памяти, второй вход которого подключен к одноименному входу шестого элемента памяти, выход которого соединен со вторым входом девятого сумматора, второй вход пятого элемента памяти подключен к одноименному входу седьмого элемента памяти, а выход - к первому входу восьмого сумматора, второй вход которого соединен с выходом седьмого элемента памяти, причем вторые входы третьего компаратора, шестого элемента памяти, пятого элемента памяти и третий вход восьмого сумматора подключены соответственно к первому, второму, третьему и -четвертому входам преобразователя, а выходы третьего и четвертого интеграторов - к первому и второму выходам преобразователя.
Источники информации, принятые во внимание при экспертизе
1. Попов Е.П. и др. Манипуляционные работы: динамика и алгоритмы. М., Наука, 1978, с. 198-199.
- 2.. Патент ОНА № 3816736, кл, 235-186, опублик. 1974 (прототип) .
гЦЧ
| название | год | авторы | номер документа |
|---|---|---|---|
| Асинхронный следящий привод | 1979 |
|
SU877469A1 |
| Генератор функций уолша | 1978 |
|
SU840854A1 |
| Функциональный частотный преобразователь | 1983 |
|
SU1120365A1 |
| Функциональный преобразователь | 1974 |
|
SU516051A1 |
| Цифровой измеритель искажений синусоидального напряжения | 1981 |
|
SU953588A1 |
| ЧАСТОТНО-ШИРОТНО-ИМПУЛЬСНЫЙ РЕГУЛЯТОР ПЕРЕМЕННОГО НАПРЯЖЕНИЯ С РАСПРЕДЕЛЕННОЙ НАГРУЗКОЙ | 2011 |
|
RU2472279C1 |
| ЧАСТОТНО-ШИРОТНО-ИМПУЛЬСНЫЙ РЕГУЛЯТОР ПЕРЕМЕННОГО НАПРЯЖЕНИЯ С СИММЕТРИРОВАННОЙ НАГРУЗКОЙ | 2012 |
|
RU2490685C1 |
| УСТРОЙСТВО УСКОРЕННОЙ СИНХРОНИЗАЦИИ ПРИЕМНИКА ШУМОПОДОБНЫХ СИГНАЛОВ С МИНИМАЛЬНОЙ ЧАСТОТНОЙ МАНИПУЛЯЦИЕЙ | 2011 |
|
RU2446560C1 |
| ТАНКОВЫЙ БАЛЛИСТИЧЕСКИЙ ВЫЧИСЛИТЕЛЬ | 1979 |
|
SU1840138A1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2325620C2 |
X
Y 0Z 0
...
/J
И
П
ot2
о
«Ч J J 0 0 0
ACntJi АЫп
иг.г
IXV
