1
Изобретение относится к электроизмерительной технике и предназначено для использования при реализации бесконтактного измерения постоянного (пульсирующего) тока в электрофизических и электротехнических установках различного назначения.
Известен датчик постоянного тока, содержгиций магнитопровод с рабрчей. и дополнительной рбмотками, расположенными во взаимно ортогональных плоскостях, вспомогательный источник постоянного тока, подключенный к дополнительной обмотке, конденсатор, установленный между выводами рабочей обмотки и связанный с генератором .периодических колебаний, фазочувствительный детектор fll.
Недостаток этого датчика - значительная сложность его настройки. Кроме того, наличие в, устройстве колебательного контура с высокой добротностью отрицательно сказывается на быстродействии устройства во время переходных процессов в контролируемой цепи.
Наиболее близким техническим решением к предлагаемому является актокомпенсационный датчик постоянного тока, содержащий замкнутый магнитопровод, охватывающий проводник с измеряемым током, мос.т с измерительной и эталонной обмотками, усилитель и генератор переменного нап-.
ряжения, включенные в диагонгши моста, фазочувствительный вольтметр, вход которого соединен с выходом усилителя переменного напряжения, обмотки компенсации и смещения, нагрузочный резистор установленный в цепи обмотки компенсации 12J.
Однако это устройство характеризуется низкой эксплуатационной надежностью, поскольку при .быстрых
изменениях измеряемого т,ока, а также в условиях, импульсных наводок имеет место срыв режима измерений, выражающийся в быстром необратимом переходе датчика в состояние экстремального тока компенсации. Кроме того, известное устройство имеет низкую точность измерений. Отмеченные недостатки обусловлены отсутствием в устройстве функционального
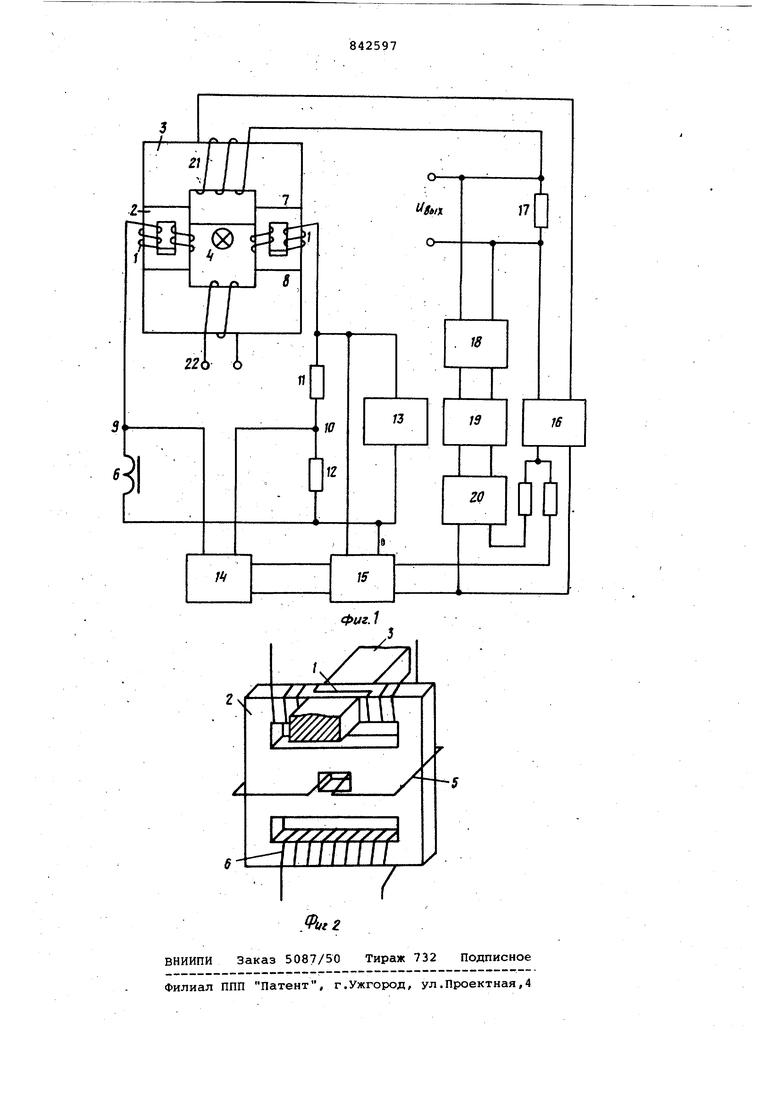
узла, Обеспечивающего.в аварийной ситуации автоматическое возобновление измерительного режима (АВИР), а также несовершенным расположением обмоток, предопределяющим, в частности, индуктивную связь между измерительной обмоткой и обмоткой компенсации. Цель изобретения - повышение надежности работы и точности измерения. Поставленная цель достигается тем, что д автокомпенсационный датчик постоянного Toka, содержащий замкнутый магнито.провод, охватывающий проводник с измеряемым током, мост с измерительной и эталонной обмотками, усилитель и генератор пере менного напряжения, включенные в диа гонали моста, фазочувствительный вып рямитель, вход которого соединен с выходом усилителя переменного напряжения, обмотки компенсации и смещени нагрузочный резистор, установленный цепи обмотки компенсации, введены амплитудный дискриминатор, реле времени, генератор пилообразного напряжения и усилитель постоянного тока, причем вход амплитудного дискриминатора подключен к выводам нагрузочного резистора, а выход через реле вре мени - ко входу генератора пилообраз ного напряжения, выходы генератора пилообразного напряжения и фазочувст вительного выпрямителя соединены со входом усилителя постоянного тока, выход которого через нагрузочный резистор связан с обмоткой компенсации а измерительная обмотка, расположенная ортогонально к обмотке компенсации, и эталонная обмотка, расположен ная ортогонально и к измерительной о мотке, и к обмотке компенсации, размещены на общем сердечнике магнитопр вода и включены в соседние плечи мос та. На фиг. 1 представлена функционал ная. схема предлагаемого автокомпенса ционногб датчика постоянного тока с упрощенным изображением измерительной и эталонной обмоток магНитопровода, на фиг. 2 - один из возможных вариан тов конструктивного выполнения указанных обмоток. Датчик содержит из1 1ерительную обмотку 1, сердечник 2, замкнутый маг.нитопровод 3, токопровод 4, короткозамкнутые витки 5, эталонную обмотку 6, поверхности 7 и 8 соприкосновения сердечника 2 и магнитопровода 3, клем мы 9 и 10 диагонали моста, резисторы 11 и 12 моста, генератор 13 перемен ного напряжения, усилитель 14 перемен напряжения, фазочувствительный выпрямитель 15, усилитель 16 постоян ного тока (УПТ). нагрузочный резистор 17, амплитудный дискриминатор 18, реле 19 времени, генератор 20 пилообразного напряжения, обмотку 21 компенсации, обмотку, 22 смещения. Блоки 18-20 составляют в целом функциональный узел АВИР, Используемый в датчике мост балан сируется по первой гармонике частоты питания при измеряемом токе в токопроводе 4, равном нулю, путем изменения тока смещения в обмотке 22 смещения. Устройство работает следующим образом. При появлении измеряемого тока в токопроводе 4 происходит разбаланс моста. Сигнал разбаланса с клемм 9 и 10, фаза которого зависит от знака измеряемого тока, поступает на вход усилителя 14 переменного напряжения. Усиленный сигнал направляется далее к фазочувствительному вып- , рямителю 15, на который подается также опорный сигнал от генератора переменного напряжения 13. Выпрямленный сигнал с выхода, фазочувствительного выпрямителя подводится к одному из входов УПТ 16, выходной ток которого поступает в обмотку 21 компенсации с такой полярностью, что создаваемое им магнитное поле оказывается направленным встречно к полю измеряемого тока. Напряжение Ug(,)j, снимаемое с нагрузочного резистора 17, пропорционально измеряемому току и является выходным сигналом датчика. Одной и той же величине начальной индуктивности измерительной обмотки 1 соответствуют два .значения магнитной индукции магнитопровода 3. Положение начальной рабочей точки задается током смещения в обмотке 22 смещения, при этом фаза полного коэффициента передачи устройства выбирается отрицательной. Если во время быстрых изменений измеряемого тока индукция в магнитопроводе 3 меняет свой знак и значительно меняется по абсолютной величине, то обратная связь в устройстве становится положительной и датчик скачком переходит в нерабочее состояние экстремального тока компенсации, т.е. происходит срыв слежения. Состояние срыва слежения обнаруживается амплитудным дискриминатором 18, который запускает реле 19 времени. Если экстремальное состояние тока компенсации длится более интервала, задаваемого с помощью реле 19 времени, запускается генератор 20 пилообразного напряжения, подключенный к одному из входов УПТ 16. При этом магнитопровод насыщается током компенсации в направлении, совпадающем с его намагниченностью в начальной рабочей точке. По мере уменьшения сигнала генератора 20 д 1лообразного напряжения насыщение магнитопровода 3 снижается до уровня возобновления режима измерений. Таким образом, при каждом срабатываУии узла АВИР происходит возврат рабочей точки магнитопровода 3 в . фиксированное положение, не зависящее от степени предшествующей намагниченности. Измерительная обмотка 1 выполнена ортогональной к обмотке 21 компен сации, т.е. таким образом, что родвижущая сила, возникающая в измерительной обмотке 1 при изменениях потока в магнитопроводе 3 в отсутствие его. постоянной намагниченности, соответствует нулю. Такая конструкция исключает явление взаимоиндукции между измерительной обмоткой 1 и любой обмоткой на магнитопро воде 3, Измерительную обмотку 1 целесообразно составлять из нескольких последовательно включенных и равноотстоящих друг от друга на магнитопроводе 3 секций, В этом случае повышается помехозащищенность датчика от внешних магнитных полей и, кроме того, обеспечивается возможность применения разъ емного магнитопровода. Измерительная обмотка 1 и эташонная обмотка 6 ортогональны друг с другом, причем последняя ортогональна еще и к обмотке 21 компенсации. Расположение обмоток 1 и б на общем сердечнике 2 обеспечивает практическое равенство их температур, а включение данных обмоток в соседние плечи моста не создает дополнительных фазовЕлх сдвигов между входным и опорным напряжениями фазочувствитель ного выпрямителя 15 при возможных изменениях частоты генератора 13 переменного напряжения. Формула изобретения Автокомпенсационный датчик пос,тоянного тока, содержащий замкнутый маг- 40 нитопровод, охватывающий .проводник , с измеряемым током, мост с измерительной и эталонной обмотками, усилитель и генератор переменного напряжения, включенные в диагонали моста, фазочувствительный выпрямитель, вход которого соединен с выходом усилителя переменного напряжения, обмотки компенсации и смещения, нагрузочный резистор, установленный в цепи обмотки компенсации, отличаю щи йс я тем, что, с целью, повышения на-дежности работы и точности измерения, в него введены амплитудный дискриминатор, реле времени, генератор пилообразного напряжения и усилитель постоянного тока, причем вход амплитудного дискриминатора подключен к выводам нагрузочного резистора, авыход через реле времени ко входу генератора пилообразного напряжения, выходы генератора пилообразного напряжения и фазочувствительного выпрямителя соединены со входом усилителя постоянного тока, выход которого через нагрузочный резистор связан с обмоткой компенсации, а измерительная обмотка, расположенная ортогонально к обмотке компенсации, и эталонная обмотка, расположенная ортогонально и к измерительной обмотке, и к обмотке компенсации, размещены на общем сердечнике магнитопровода и включены в соседние плечи моста. Источники информации, принятые во внимание при экспертизе 1, Авторское свидетельство СССР № 512533, кл. Н 02 Н 9/02, 1974, 2. Патент Японии № 39-15497, кл. 110 В б, 1964,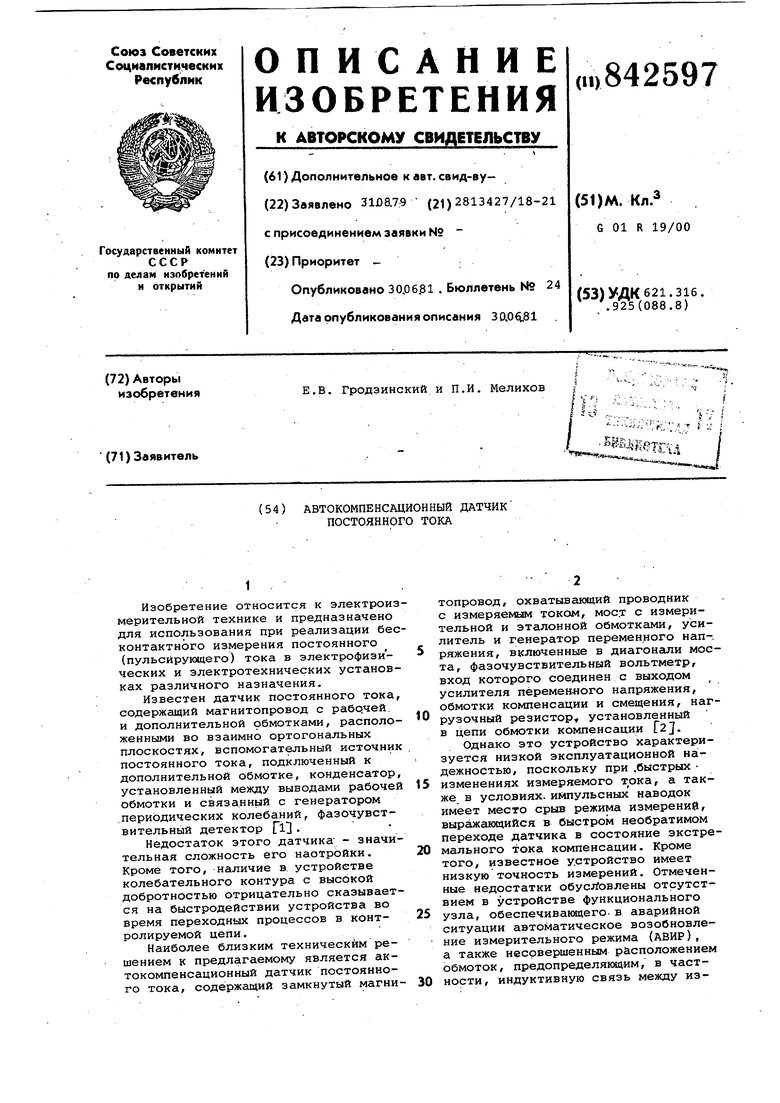
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМАГНИТНЫЙ ДАТЧИК УСКОРЕНИЯ | 2009 |
|
RU2401431C1 |
| УСТРОЙСТВО АНАЛОГОВОГО ДАТЧИКА РЕАКТИВНОЙ СОСТАВЛЯЮЩЕЙ ПЕРЕМЕННОГО ТОКА | 2017 |
|
RU2673335C2 |
| Измерительный преобразователь электрических и магнитных величин | 1977 |
|
SU702325A1 |
| Стабилизатор постоянного регулируемого тока | 1990 |
|
SU1728853A1 |
| Устройство измерения постоянного тока | 1972 |
|
SU679888A1 |
| АКСИАЛЬНЫЙ УПРАВЛЯЕМЫЙ БЕСКОНТАКТНЫЙ ДВИГАТЕЛЬ-ГЕНЕРАТОР | 2015 |
|
RU2601952C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2325620C2 |
| Устройство для измерения ускорения | 1984 |
|
SU1252730A1 |
| Устройство для управления трансформаторами с магнитной коммутацией | 1977 |
|
SU743156A1 |
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ НЕРОВНОТЫ И ДИСПЕРСИИ ЛЕНТЫ, РОВНИЦЫ И ПРЯЖИ | 1969 |
|
SU256329A1 |