Изобретение относится к электрическому моделированию и может быть использовано в системах автоматического управления для моделирования и одновременного считывания в нескольких точках различных функций. Известно устройство для моделирования кучево-дождевой облачности, содержащее три формирователя развертывающих напряжений, усилитель видео сигнала, блок выделения модуля, огра ничитель, блок умножения, преобразов тель код-напряжение, сумматор и нели нейный преобразователь. Однако это устройство не позволяет моделировать условия пелагического промысла tl} , Наиболее близким по технической сущности к предлагаемому изобретению является устройство для моделировани рельефа дна, содержащее носитель информации , исполнительный механизм, н подвижный блок считывания, преобразо ватель дискретных сигналов в видеоимпульсные, два преобразователя напряжение-частота, сумматор, два цифр анёшоговых преобразователя, реверсив ный счетчик и два индикатора l2j. Недостаткаш известного устройства являются сложность схемы и наличие нескольких преобразователей в цепи управления, что приводит к снижению точности моделирования. Цель изобретения - повышение точности моделирования. Поставленная цель достигается тем, что в известное устройство, содержащее, исполнительный механизм, механически связанный с носителем информации, неподвижный блок считывания, выход которого подключен ко входу первого преобразователя напряжения в длительность, второй преобразователь напряжения в длительность,выходы преобразова;телей напряжения в длительность соединены соответственно со входами индикаторов, введены подвижный блок считывания, потенциометр горизонтальной дальности, компаратор, два электронных ключа, исполнительный реверсивный механизм, источник опорного напряжения и источник эталонного тока, причем носитель информации выполнен в виде диэлектрической пластины, на которую нанесена токопроводящая дорожка, подключенная к шине нулевого потенциала, электрический вход исполнительного механизма является первым входом устройства, втюрым входом
которого является первый вход компаратора, источник опорного напряжения подключен к первому выводу потенциометра горизонтальной дальности, второй вывод которого соединен с шиной нулевого потенциала, источник эталонного тока подключен ко входам подвижного и неподвижного блоков считывания , выход подвижного блока считывания соединен со входом второ1ГО преобразователя напряжения в дли тельность, подвижный контакт потенциометра горизонтальной дальности подключен ко второму входу компаратора, выход которого соединен со входами первого и второго электронных ключей, выходы которых подКлючены соответственно к первому и второму электрическим входам исполнительного реверсивного механизма, механически связанного с подвиж ным блоком считывания и с подвижным контактом потенциометра горизонтальной дальности.
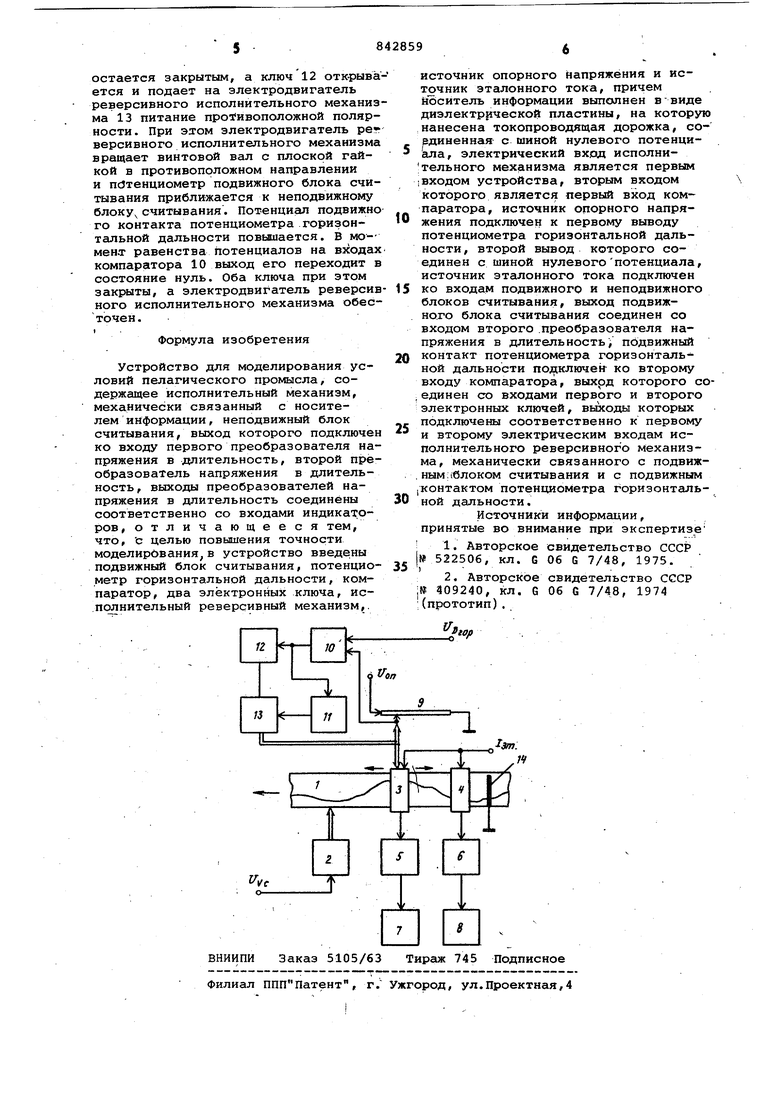
На чертеже изображено устройство для моделирования условий пелагического промысла.
Устройство содержит носитель.1 информации, исполнительный механизм 2, подвижный блок 3 считывания, неподвижный блок 4 считывания, преобразователи 5, б напряжения в длительность, индикаторы 7 и 8, потенциометр 9 горизонтальной дальности, компаратор 10, ключи 11, 12, исполнительный реверсивный механизм 13, скользящий, контакт 14.
Устройство работает следующим образом.
При подаче входного напряжения Uvc, на электрический вход исполнительного механизма 2 носитель 1 информации перемещается в направлении от неподвижного блока считывания 4 к подвижному блоку 3 считывания со скоростью, пропорциональной величине приложенного напряжения Uvj. (скорость судна). Потенциометры подвижного блока считывания и неподвижного блока считывания прижаты к. токопроводящей дорожке носителя 1 информации, форма которой соответствует заданному рельефу дна. Потенциометры подвижного и неподвижного блоков считывания и токопроводящая дорожка носителя информации, соединенная , скользящий контакт 14с общей шиной, образуют переменные резисторы сопрс|тивление которых зависит от местсАюложения точки касания токопроводящей дорожки с потенциометрами. Соответствующий потенциал, снимамый с потенциометров блоков считывания, пропорционален, глубине под судном и тралом. Потенциалы блоков считывания поступают на. входы преобразователей 5, б напряжения в длительность и регистрируются на соответствующих индикаторах 7, 8. Подвиж
ный блок считывания (считыватель тралового зонда) жестко связан с реверсивным исполнительным механизмом 13, который предназначен для установки расстояния между блоками считывания до величины, пропорциональной расчетной горизонтальной дальности между судном и тралом.
Реверсивный исполнительный механизм работает следующим образом.
Если оба ключа закрыты, электродвигатель реверсивного исполнительного механизма обесточен. Подвижный блок 3 считывания и ползунок потенциометра горизонтальной дальности неподвижны. При поступлении положительного напряжения на электродвигатель реверсивного исполнительного механизма через один из ключей, винтовой вал вращается в сторону увеличения расстояния между блоками считывания. При подаче отрицательного напряжения на электродвигатель реверсивного исполнительного механизМа винтовой вал вращается в противоположном направлении, т.е. на сближение блоков считывания, К потенциометру 9 горизонтальной дальности подключено опорное напряжение Upn. С ползунка потенциометра гор1 зонтальной дальности снимается потенциал, пропорциональный действительному расстоянию между блоками считывания. Этот потенциал подается на второй вход компаратора 10, на первьй вход которого, подается напряжение, пропорциональное расчетной величине горизонтальной дальности. Если потенциал, посту пающий на подвижный контакт потенциометра горизонтальной дальности 9, выше потенциала Uupop напряжение на выходе компаратора 10 находится в состоянии минус-. При этом ключ 11 открыт, а ключ 12 закрыт. Электродвигатель реверсивного исполнительного механизма 13 через понижающий редуктор вращает винтовой вал с плоской гайкой. Закрепленный на плоской гайке потенциометр подвижного блока 3 считывания удаляется от неподвижного блока 4 считывания (считыватель эхолота) . При этом потенциал подвижного контакта потенциометра горизонтальной дальности понижается. В момент равенства потенциалов на входах компаратора последний переходит в состояние нуль. Электродвигатель реверсивного исполнительного механизма обесточийается. Такое состояние компаратор сохраняет до тех пор пока не произойдет изменение расчетной горизонтальной дальности t/Upj p. Если потенциал подвижного контакта потенциометра горизонтальной дальности ниже потенциала расчетной горизонтальной дальности UD ,напряжение на выходе компаратора переходит в состояние йлюс. Ключ 11 при этом
Г
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ШУМА | 1999 |
|
RU2180732C2 |
| Тренажер оператора энергоемких процессов | 1981 |
|
SU1043720A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВ.\НИЯ РЕЛЬЕФА ДНА | 1973 |
|
SU409240A1 |
| Устройство слежения за информационной дорожкой носителя оптической записи | 1988 |
|
SU1638724A1 |
| Устройство для защиты трехфазного асинхронного электродвигателя от аварийного режима | 1985 |
|
SU1377955A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ ФИЛЬТРАЦИИ ЖИДКОСТИ | 1995 |
|
RU2094090C1 |
| Устройство для моделирования зондирования рельефа дна гидролокатором и эхолотом | 1983 |
|
SU1138810A1 |
| Функциональный преобразователь | 1981 |
|
SU980108A1 |
| Функциональный преобразователь | 1978 |
|
SU781838A1 |
| Устройство для считывания гра-фичЕСКОй иНфОРМАции | 1978 |
|
SU805368A1 |
