первому и второму выходам третьего усилителя, электронно-лучевая трубка оптически соединена через оптическую маску с входом фотоприемника, выход генератора тактовых импульсов подключен к управляющим входам первого и второго коммутаторов первого и второго блоков памяти, выход второго блока памяти соединен с вторым входом компаратора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для имитации отраженных эхосигналов | 1980 |
|
SU943764A1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2434246C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ИЗМЕРЕНИЯХ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2429507C1 |
| Морское патрульное судно для экологического контроля территориальных вод, континентального шельфа и исключительной экономической зоны | 2015 |
|
RU2610156C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2439614C2 |
| ГИДРОАКУСТИЧЕСКАЯ СИСТЕМА ДЛЯ ВИЗУАЛИЗАЦИИ ПОДВОДНОГО ПРОСТРАНСТВА | 2011 |
|
RU2461845C1 |
| СИСТЕМА И СПОСОБ 3D ИССЛЕДОВАНИЯ МОРСКОГО ДНА ДЛЯ ИНЖЕНЕРНЫХ ИЗЫСКАНИЙ | 2015 |
|
RU2608301C2 |
| ГИДРОАКУСТИЧЕСКАЯ СИСТЕМА ВИЗУАЛИЗАЦИИ ПОДВОДНОГО ПРОСТРАНСТВА | 2014 |
|
RU2572666C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ФОРМЫ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ДИСКРЕТНЫХ ИЗМЕРЕНИЯХ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2326408C1 |
| ИМИТАТОР ЭХОСИГНАЛА ЭХОЛОТА | 2015 |
|
RU2604170C1 |
УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ЗОНДИРОВАНИЯ РЕЛЬЕФА ДНА ГИДРОЛОКАТОРОМ И ЭХОЛОТОМ, содержащее два ключа, два цифроаиалоговых преобразователя, генератор тактовых импульсов, первьй сумматор, первый вход которого является входом задания максимальной гулибны устройства, вход задания первой составляющей скорости которого подключен к информационному входу входного генератора, выход которого соединен с первым входом компаратора, выход которого является выходом наклона рельефа устройства, отличающееся тем, что, с целью повышения точности, в него введены второй и третий сумматоры, три усилителя, генератор синхроимпульсов, два блока памяти, первый и второй блоки моделирования сигнала гидролокатора, каждый из которьгх выполнен в виде интегратора, преобразователь напряжения в оптический сигнал, выполненный в виде электронно-лучевой трубки, блок преобразования рельефа дна в оптический сигнал, выполненный в виде оптической маски, и фотоприемник, выход которого через первьш усилитель подключен к второму входу первого сумматора, выход которого соединен с входами первого и второго блоков памяти, выход первого блока памяти является выходом глубины дна устройства, первый и второй входы задания координат местопогожег ния устройства подключены к входам соответственно первогб и второго цифро-аналоговых преобразователей, выходы которых соединены с первыми входами соответственно второго и третьего сумматоров, выход генерато(Л ра синхроимпульсов подключен к входам запуска входного интегратора первого и второго блоков моделирования сигнала гидролокатора, входы задания второй и третьей составляющих скорости устройства соединены с инфор мационными входами интеграторов соответственно первого и второго блоСАд 00 00 ков мбделирования сигнала гидролокатора, выходы которьгх подключены к информационньм входам соответственно второго и третьего коммутаторов, вьпсоды которых соединены с вторыми входами соответственно первого и второго сумматоров, выходы которых подключены к входам соответственно второго и третьего усилителей, первый и второй выходы второго усилителя соединены соответственно с первым и вторым отклоняющими электродами электронно-лучевой трубки, третий и четвертый отклон5пощие электроды которой подключены соответственно к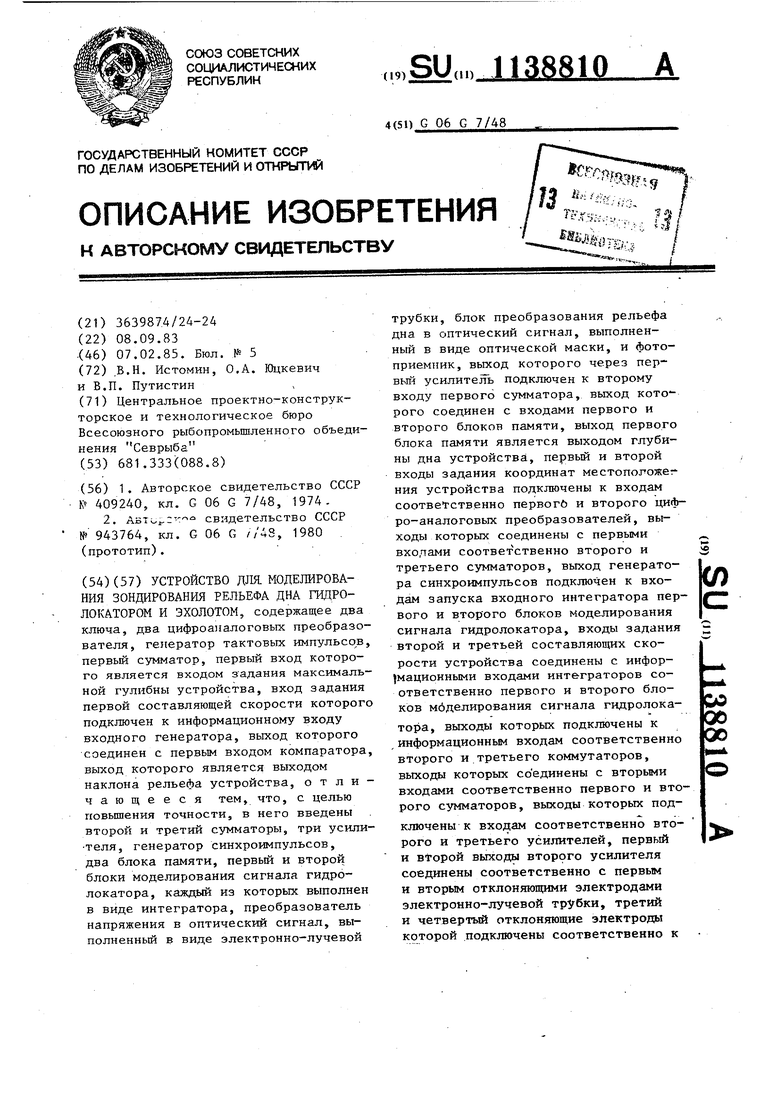
Изобретение относится к области моделирования и может быть использо вано в тренажных комплексах для ими тации движения судов или самолетов относительно рельефа дна или земной поверхности с возможностью зондирования их локационными станциями. Известно устройство для моделиро вания реяьефа дна, содержащее носитель информации о рельефе дна, блок считывания, преобразователи напряжение - частота и код - напряжение, индикатор, регистратор, реверсивный счетчик, сумматор ГЛ . Недостатком данного устройства является невозможность имитации зон дирования рельефа дна в стороне от судна при различных углах поворота антенны лоцирующей станции в вертикальной и горизонтальной плоскостях Наиболее близким по технической сущности к изобретению является уст ройство для имитации отраженных эхосигналов, содержащее регистры, реверсивные счетчики, цифро-аналого вые преобразователи, сумматор, компаратор, интегратор, элементы И, преобразователи напряжения в часто«ту Z. Недостатком известного устройств -является то, что оно моделирует зондирование гидролокатором условного рельефа дна в стороне от судна, характер которого задается нелинейными цифро-аналоговыми преобразователями. Точность моделирования конкретных рельефных участков дна Мирового океана в данном устройстве мала и ограничена в основном техни ческими возможностями цифро-аналоговых преобразователей. В то же в-ремя известное устройство не обеспечивает возможности одновременного зондирования участков дна гидролокатором в стороне от судна в зависимости от направления зондирования и эхолотом под килем судна. В промысловых тренажерных комплексах, в которых должны применяться такие устройства, необходимо моделировать рельеф дна конкретного промыслового района моря с той целью, чтобы обучающиеся на тренажере судоводители приобрели навыки работы в данном районе с учетом особенностей рельефа дна. Это особенно важно в условиях придонного траления, когда трал проводится на небольшом удалении от дна. Применение промысловых тренажерных комплексов с моделированием рельефа грунта конкретных прог мысловых районов позволяет значительно повысить качество подготовки судоводительского состава, что в конечном итоге приводит к повьшению эффективности промысловой эксплуатации судов на реальном промысле. В то же время в реальных условиях промысла судоводитель для проводки трала одновременно использует информацию о рельефе дна и подводных объектах в стороне от судна, получаемую от гидролокатора, и под килем судна - от эхолота. Цель изобретения - моделирование рельефа дна конкретных промысловых районой Мирового океана с возможностью зондирования его одновременно гидролокатором и эхолотом, т.е. повышение точности моделирования и расширение функциональных возможностей. Поставленная цель достигается тем, что в устройство, содержащее два ключа, два цифро-аналоговых преобразователя, генератор тактовых импульсов, первый сумматор, первьй вход которого является входом задания максимальной глубины устройства, вход задания первой составляющей скорости которого подключен к инфор31
мационному входу входного интегратора, выход которого соединен с первым входом компаратора, выход которого является выходом наклона рельефа устройства, введены второй и третий сумматоры, три усилителя, генератор синхроимпульсов, два блока памяти, первый и второй блоки моделирования сигнала гидролокатора, каждьй из которых выполнен в виде интеграторов, преобразователь напряжения в оптический сигнал, в зшолненный в виде электронно-лучевой трубки, блок преобразования рельефа дна в оптический сигнал, выполненный в вид оптической маски, и фотоприемник, ВЫХОД ко-торого через первый усилител подключен к второму входу первого суматора, выход которого соединен с входами первого и второго блоков памяти, выход первого блока памяти является выходом глубины дна устройства, первый и второй входы задания координат местоположения эхолота устройства подключены к входам соответственно первого и второго цифро-аналоговых преобразователей, выходы которых соединены с первыми соответственно второго и третьего сумматоров, выход генератора синхроимпульсов подключен к входам запуска входного интегратора и интеграторов первого и второго блоков моделирования сигнала гидролокатора, входы задания второй и третьей составляющих скорости устройства соединены с информационными входами интегваторов соответственно первого и второго блоков моделирования сигнала гидролокатора, выходы которых подключены к информационным входам соответственно второго и
третьего коммутаторов, выходы которых соединены с вторыми входами соответственно первого и второго сумматоров, выходы которых подключены к входам соответственно второго и третьего усилителей, первый и Лорой выходы второго усилителя соединены соответственно с первым и .вторым отклоняющими электродами электроннолучевой трубки, третий и четвертый отклоняющие электроды которой подключены соответственно к первому и второму выходам третьего усилителя, электронно-лучевая трубка оптически соединена через оптическую маску с входом фотоприемника, выход
104
генератора тактовых импульсов подключен к управляющим входам первого и второго коммутаторов и первого и второго блоков памяти, выход второго блока памяти соединен с вторым входо компаратора.
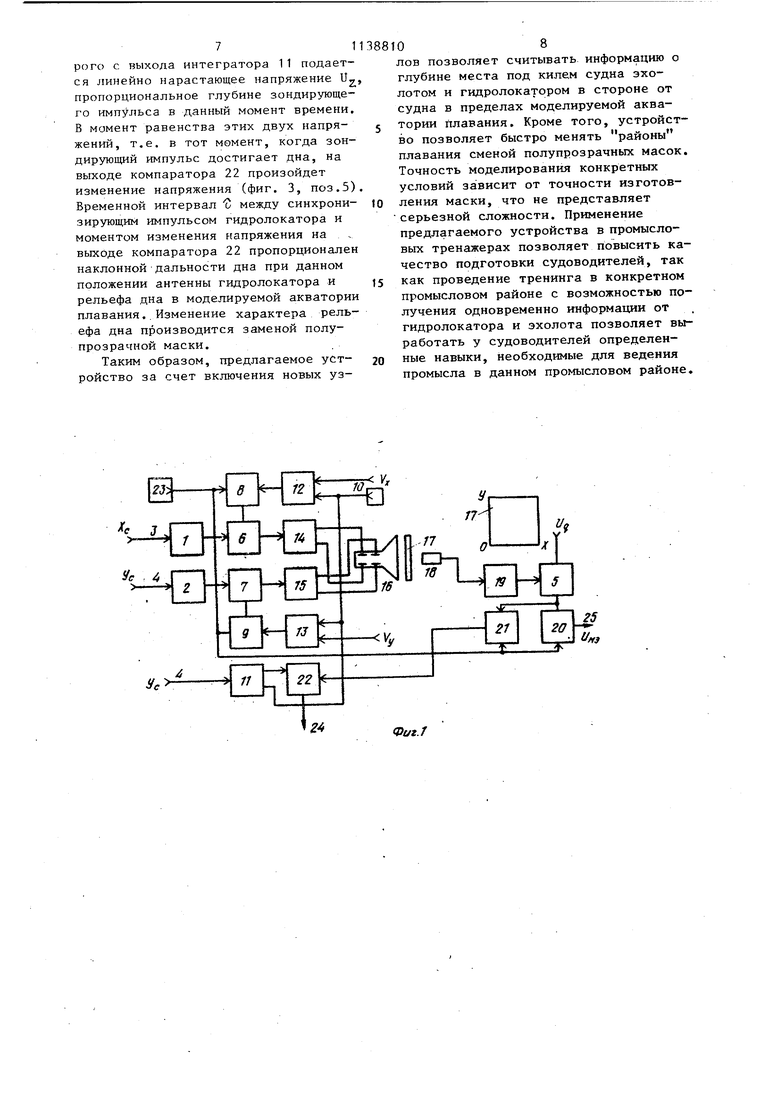
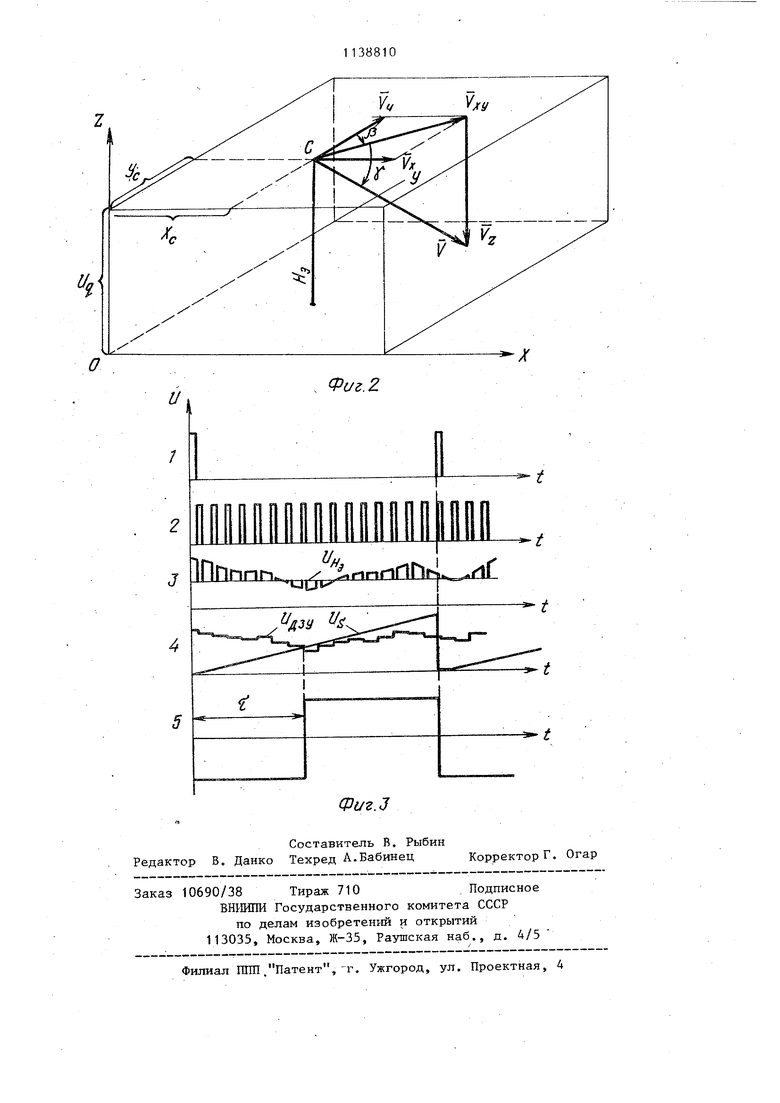
На фиг. 1 представлена функциональная схема устройства; на фиг. 2 схема разложения вектора скорости зондирующего импульса; на фиг. 3 - временная диаграмма работы устройства.
Устройство содержит цифро-аналоговые преобразователи 1 и 2, входы 3 и 4 текущих координат судна Х и УС, сумматоры 5-7, коммутаторы 8 и 9 генератор 10 синхроимпульсов, интегратор 11, блоки моделирования сигнала гидролокатора, выполненные в виде интеграторов 12 и 13, усилители 14 и 15, электронно-лучевую трубку 16, блок преобразования рельефа дна в оптический сигнал, выполненный в виде полупрозрачной оптической маски 17, фотоприемник 18, усилитель 19, блоки 20 и 21 памяти, компаратор 22, генератор 23 тактовых импульсов, выходы 24 и 25.
Устройство рабо4ает следующим образом;
Инофрмация о рельефе дна з аписы-, вается на квадратной полупрозрачной оптической маске 17. Левый нижний угол маски принят за начало отсчета координат. Координата X отсчитывается по горизонтальной стороне маски о начала отсчета координат, координата У от начала отсчета по вер.тикальной стороне маски, и это направление принято за направление на север в принятой системе координат. Отсчет углов в горизонтальной плоскости производится от направления на север по часовой стрелке. Координата Z зависит от прозрачности маски, а ее величина пропорциональна прозрачности маски. Таким образом, каж,цой паре координат X и У соответствует вполне определенная вехшчина координаты Z.
Полупрозрачн ая оптическая маска 17 закреплена на экране электроннолучевой трубки 16. С другой стороны оптической маски 17 помещен фотоприемник 18, Текущие координаты Х, и Yf. судна носителя эхолота и гидролокатора через соответствующие цифро-аналоговые преобразователи 1 и 2 поступают на первые входы сумматоров 6 и 7, На вторые входы сумматоров 6 и 7 через соответствующие ком мутаторы 8 и 9 подключены относительные текущие коорнднаты зондирую щего импульса гидролокатора с выхода интеграторов 12 и 13. Запуск интеграторов 12 и 13 осуществляется о генератора 10 синхронизирующим импульсом гидролокатора одновременно с запуском его генератора зондирующего импульса. Управление коммутато рами 8 и 9 и блоками 20 и 21 памяти осуществляется импульсами генератора 23, частота следования которых значительно выше частоты следования генератора 10 синхронизирующих импульсов гидролокатора и выбирается исходя из необходимой дискретности считьгоания рельефа дна. Вектор скорости распространения зондирующего импульса гидролокатора V -раскладывается на горизонталь ную Удц (фиг. 2) и вертикальную V составляющие. Горизонтальная состав ляющая Vv., раскладывается в свою U составляющие по коордиочередьнатным осям V;. и Vn. Величины сосвычисляются с потавляющих вектора мощью выражений V,y V siny V sin В cosY; - угол наклона антенны гидро локатора в вертикальной плоскости; угол поворота антенны в го ризонтальной плоскости. Аналоговые величины составляющих Х Н подаются на входы интег раторов 11-13 соответственно. Синхронизирующим импульсом гидролокатора интеграторы 11-13 устанавливаю ся в исходное состояние (фиг. 3, поз. 1), ПосЛе этого на выходах интеграторов 12 и 13 появляются линей но нарастающие напряжения, пропорци нальные относительным координатам X и У зондирующего импульса, а на выходе интегратора 11 - линейно нарастающее напряжение, пропорциональ ное глубине зондирующего импульса относительно поверхности моря. Единичным уровнем синхронизирующего им пульса генератора 23 (фиг. 3, поз.2) коммутаторы 8 и 9 запрещают прохож.дение координат X и У зондирующего импульса на сумматоры 6 и 7. На выходах сумматоров присутствуют напряжения, пропорциональные координатам судна Х и У-;. Эти напряжения усиливаются усилителями 14 и 15 и прикладываются к соответствующем электродам электронно-лучевой трубки 16. Светящаяся точка на экране трубки устанавливается в положение, соответствующее текущим координатам судУС, при этом яркость свечения люминофора постоянна для любых координат. За счет того, что оптическая маска 17 имеет различную прозрачность, количество света, падающего на фотокатод фотоприемника 18 для различных координат различно, а следовательно, различна и величина сигнала на входе усилителя 19. Напряжение на выходе усилителя 19 изменяется от нуля на темных участках оптической маски 17 flo максимального значения на светлых участках маски. Это напряжение складывается с напряжением Urf-, пропорциональным диапазону глубины. С выхода сумматора 5 напряжение, соответствующее глубине места в данной точке с координатами Х и УС, поступает на входы блоков 20 и 21 памяти. Единичным уровнем синхроимпульса генератора 13 разрешается запись информации в блок 20 памяти и запрещается в блок 21 памяти. Таким образом, с выхода блока 20 памяти постоянно снимается напряжение , пропорциональное глубине места в точке нахождения судна в принятой системе координат. Нулевым уровнем синхроимпульса генератора 23 разрешается прохождение относительных координат X и У зондирующего импульса через коммутаторы 8 и 9 на сумматоры 6 и 7. На выходах сз мматоров 6 и 7 появляются напряжения, пропорциональные текущим истинным координатам зондирующего импульса. Напряжение на выходе сумматора5 (фиг. 3, поз. 3), пропорциональное глубине места в точке с координатами зондирующего импульса, записьюается в блоке 21 памяти. Напряжение глубины места с выхода блока 21 памяти (фиг. 3, поз.4) поступает на вход компаратора 22, на другой вход кото711
рого с выхода интегратора 11 подается линейно нарастающее напряжение И. пропорциональное глубине зондирующего импульса в данный момент времени. В момент равенства этих двух напряжений, т.е. в тот момент, когда зондирующий импульс достигает дна, на выходе компаратора 22 произойдет изменение напряжения (фиг. 3, поз.5). Временной интервал о между синхронизирующим импульсом гидролокатора и моментом изменения напряжения на выходе компаратора 22 пропорционален наклонной дальности дна при данном положении антенны гидролокатора и рельефа дна в моделируемой акватории плавания.. Изменение характера рельефа дна производится заменой полупрозрачной маски.
Таким образом, предлагаемое устройство за счет включения новых уз108
лов позволяет считывать информацию о глубине места под килем судна эхолотом и гидролокатором в стороне от судна в пределах моделируемой акватории плавания. Кроме того, устройство позволяет быстро менять районы плавания сменой полупрозрачных масок. Точность моделирования конкретных условий зависит от точности изготовления маски, что не представляет серьезной сложности. Применение предлагаемого устройства в промысловых тренажерах позволяет повысить качество подготовки судоводителей, так
как проведение тренинга в конкретном промысловом районе с возможностью получения одновременно информации от гидролокатора и эхолота позволяет выработать у судоводителей определен-
ные навыки, необходимые для ведения промысла в данном промысловом районе.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВ.\НИЯ РЕЛЬЕФА ДНА | 0 |
|
SU409240A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
