(54) ТРЕНАЖЕР ПЛОВЦОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер пловца | 1979 |
|
SU943810A1 |
| Узел для регистрации параметров прыжка в длину | 1980 |
|
SU923559A1 |
| Устройство для регистрации фальстартаВ СпОРТиВНОМ плАВАНии | 1978 |
|
SU836639A1 |
| Тренажер операторов систем управления | 1981 |
|
SU953650A1 |
| Тренажер спортсмена-воднолыжника | 1980 |
|
SU921585A1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ ПЛОВЦОВ | 2014 |
|
RU2568865C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПУЛЬСА | 1990 |
|
RU2032375C1 |
| Способ оценки техники гребковых движений рук при плавании | 2017 |
|
RU2679589C1 |
| СПОСОБ ВЫПОЛНЕНИЯ ТРЕНИРОВОЧНОГО ПОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2156501C1 |
| Устройство для прыжков | 1989 |
|
SU1787459A1 |
1
Изобретение Относится к автоматике и вычислительной технике, в частности к спортивному оборудованию, и может быть использовано, в основном, для управления тренировочным процессом подготовки пловцов в условиях спортивного бассейнаИзвестны тренажеры, состоящие из нагрузочных устройств и кинематических цепей, воспроизводящих структуру движений изучаемого стиля плавания 1.
Возможности этих тренажеров ограничены. Они преимущественно используются для силовой тренировки на суще или начального обучения технике плавания.
Известны тренажеры, состоящие из водного трегбана-бассейна со встречным потоком воды, блока задания режима лидирования, лидирующего устройства, устройства управления режимом лидирования, видеоконтрольного устройства и блока регистрации 2.
Такие тренажеры позволяют контролировать все движения пловца, задавать ему темп, частоту дыхания и другие параметры. Скорость потока регулируется с точностью до 0,02 м/с. Бассейн компактный, его размеры - 8,3x3,1x3,3 м. Однако такие устройства не дают возможности проводить комплексную тренировку пловцов, отрабатывать технику старта, поворота и финища. Kpojvie того, ограниченность размеров третбана в какой-то мере способствует закреплению неадекватного динамического стереотипа движения.
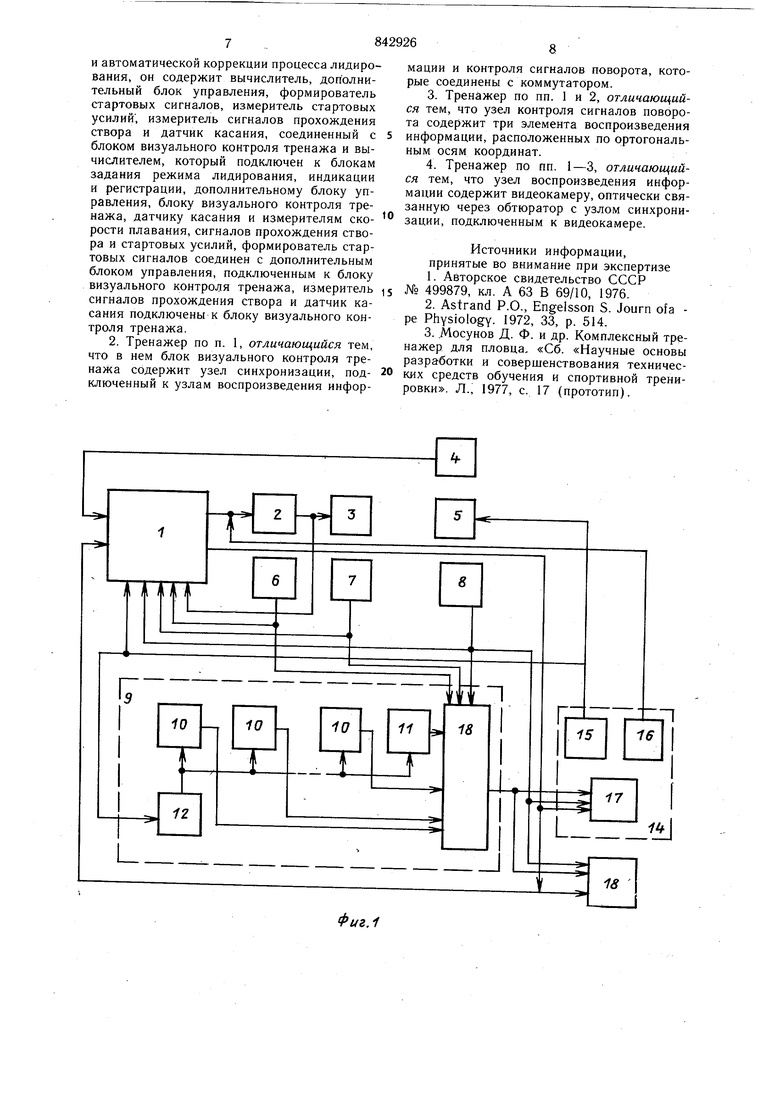
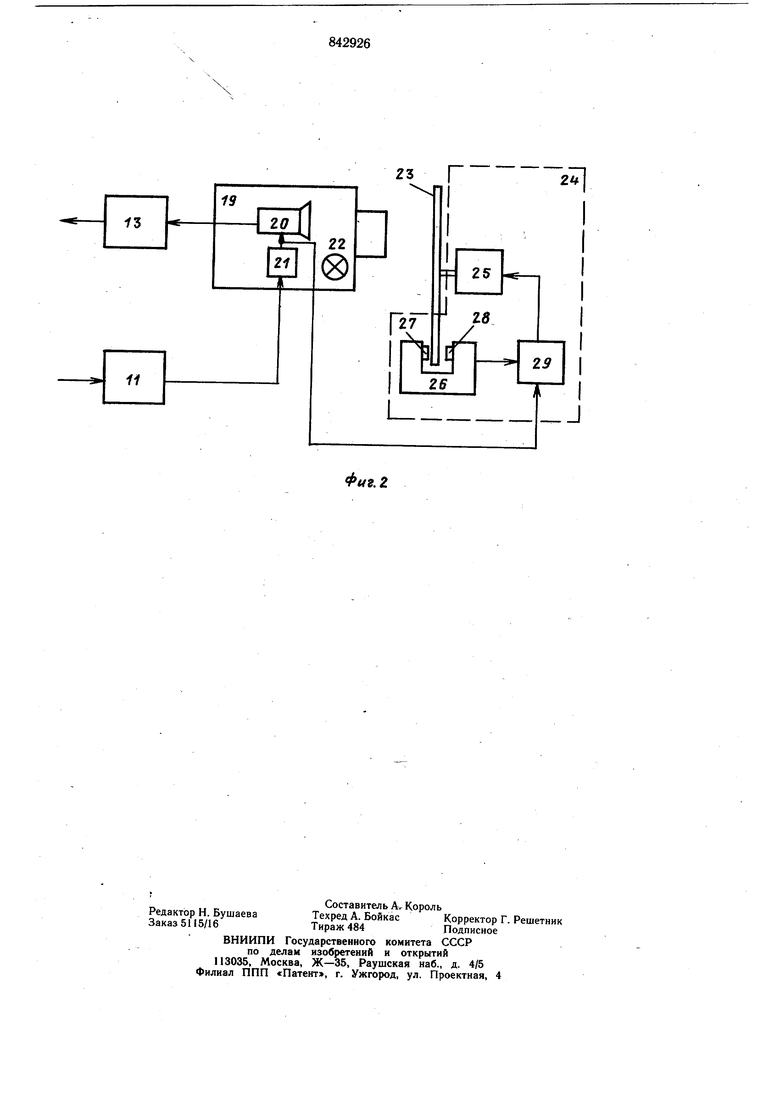
Наиболее близок к предлагаемому тренажер, состоящий из последовательно соединенных устройства управления режимом лидирования, блока задания режима лидирования и лидирующего устройства, измерителя скорости пловца, динамометра, датчика ускорения, резинового амортизатора, видеоконтрольного устройства, выполненного в виде двух видеокамер, соединенных параллельно, блока визуального контроля и блока регистрации. Резиновый амортизатор укреплен одним концом к поясу на теле пловца, а другим через динамометр - к торцовой стороне бассейна, кроме того, измерительный выход динамометра, датчик ускорения, измеритель скорости пловца и видеоконтрольное устройство подсоединены к блоку визуального контроля и блоку регистрации 3. Этот тренажер позволяет совершенствовать технику спортивного плавания, способствует развитию специальной выносливости, силы, скорости, темпа и ритма движений. Принцип работы тренажера состоит в том, что пловец с установленным «на стопе резиновым амортизатором выполняет плавательные движения с заданной частотой и силой согласно блоку задания режима лидирования и лидирующего устройства. В устройстве предусмотрена цепь коррекции режима лидирования, состоящая из измерительных приборов (измерителя скорости пловца, динамометра, датчика ускорения и видеоконтрольного устройства), блока визуального контроля и устройства управления режимом лидирования. Тренер-преподаватель имеет постоянную возможность контролировать движения спортсмена и изменять по своему усмотрению режим лидирования. Недостатками рассмотренного устройства являются наличие резинового амортизатора, ограничивающего диапазон движений, выполняемых спортсменом, а также отсутствие количественной оценки качества выполняемого движения, коррекция режима лидирования производится по субъективным что, ееоценкам тренера-преподавателя тественно, снижает качество тренировочного процесса. Цель изобретения - повышение точности устройства за счет автоматической оценки биомеханических параметров движения и автоматической коррекции процесса лидирования. Указанная цель достигается тем, что в тренажер, содержащий последовательно соединенные блок управления режимом лидирования, блок задания режимов лидирования и формирователь сигналов заданной скорости плавания, блока визуального контроля тренажа, индикации и регистрации, подключенные к измерителю скорости плавания, блок визуального контроля тренажа соединен с блоками индикации и регистрации, введены вычислитель, дополнительный блок управления, формирователь стартовых сигналов, измеритель стартовых усилий, измеритель сигналов прохождения створа и датчик касания, соединенный с блоком, визуального контроля тренажа и вычислителем, который подключен к блокам задания режимов лидирования, индикации и регистрации, дополнительному блоку управления, блоку визуального контроля тренажа, датчику касания и измерителям скорости плавания, сигналов прохождения створа и стартовых усилий, формирователь стартовых сигналов соединен с дополнительным блоком управления, подключенным к блоку виз зльиого контроля тренажа, изм-ерит€ль сигналов прохождения створа и датчик касания подключены к блоку визуального контроля тренажа. Блок визуального контроля содержит узел синхронизации, подключенный к узлам воспроизведения инфор1у1ации и контроля сигналов поворота, которые соединены с коммутатором. Узел контроля сигналов поворота содержит три элемента воспроизведения информации, расположенных по ортогональным осям координат. Кроме того, узел воспроизведения информации содержит видеокамеру, оптически связанную через обтюратор с узлом синхронизации, подключенным к видеокамере, На фиг. 1 схематически изображено предлагаемое устройство, на фиг. 2 - блок предъявления информации. Устройство содержит вычислитель 1, блок 2 задания режимов лидирования, формирователь 3 сигналов заданной скорости плавания, измеритель 4 стартовых усилий, формирователь 5 стартовых сигналов, измеритель 6 сигналов прохождения створа, датчик 7 касания, измеритель 8 скорости плавания, блок 9 визуального контроля тренажа; узлы 10 воспроизведения информации, узел 11 контроля сигналов поворота, узел 12 синхронизации, коммутатор 13, пульт 14 оператора, дополнительный блок 15 управления, блок 16 управления режимом лидирования, блок 17 индикации, блок 18 регистрации, видеокамера 19, видикон 20, узел 21 кадровой развертки, лампочка 22 подсвета, обтюратор 23, узел 24 синхронизации, узел 25 управления работой обтюратора, датчик 26 положения обтюратора лампочка 27, фотосопротивление 28, элемент 29 совпаПредлагаемое устройство состоит из следуюш,их основных подсистем; вычислительной, контрольно-измерительной, управления режимом лидирования и пульта оператора. Вычислитель 1 предназначен для автоматической оценки качества выполняемого движения. В связи с этим он включает биомеханическую модель пловца и элементы оценки качества движения. В качестве биомемеханической модели можно, например, использовать модель, в которой пловца представляют в виде разветвленной кинематической цепи, связывающей соответствующие двигательные звенья пловца, и системы уравнений, описывающей динамику движения этих звеньев. Входными параметрами такой модели являются координаты «опорных точек каждого звена, выходными - моменты и силы, возникающие в сочленениях двигательного аппарата пловца. Элемент оценки качества движения вычислителя 1 сопоставляет значение моментов и сил со скоростью движения пловца и на этом основании вырабатывает корректирующий сигнал для изменения режима лидирования. Измеритель 6 сигналов прохождения створа служит для определения момента на чала и окончания поворота. Поэтому он расположен обычно в 5 м от торцовой стенки бассейна и может быть выполнен в виде источника света и фотоэлемента или двух трехкомпонентных феррозондов и источника постоянного магнитного поля, размещенного на пловце. Датчик 7 касания размещен непб.средственно на торцовой поверхности бассейна и выполнен в виде тензочувствительной пластины. Измеритель 8 скорости плавания представляет собой гидроакустический измеритель скорости пловца с использованием эффекта Допплсра. Все эти узлы управляют с помощью коммутатора 13 переключением узлов 10 и 11. В свою очередь, предлагаемое выполнение узла 10 позволяет устранить инерционность видеокамеры 19, обусловленной послесвечением люминофора видикона 20. Использование только одной видеокамеры 19 не позволяет получить точные значения координат «опорных точек. Датчик 26 может быть выполнен различно, например в виде отверстий на обтюраторе 23, лампочки 27 и фотосопротивления 28. Он предназначен совместно с узлом 25 для синхронизации вращения обтюратора 23 согласно кадровой развертке. Блок 11 предназначен для контроля выпол-. нения поворота и представляет собой три телевизионных устройства, аналогичных узлам 10 (представлены на фиг. 2) и помещенных в водонепроницаемые боксы. Телевизионные устройства блока 11 располагают внутри бассейна ортогонально друг другу. Формирователь 5 и блок 4 измерения стартовых усилий -используют для отработки техники старта, они выполнены в виде обычного стартового пистолета и тензоплатформы, установленной на стартовой тумбочке (не показаны).
Управление режимом лидирования, как и в известном устройстве, включает последовательно соединенные блок 16 управления режимом лидирования, блок 2 задания режима лидирования и формирователь 3. Такое управление позволяет задавать спортсмену условия тренировки и лидирования его в процессе прохождения дистанции. Блок 2 выполнен в виде информационного табло и может содержать средства экспресс-информации об изменении режима лидирования, например систему радиосвязи. Формирователь 3 представляет собой, например, светолидер или звуколидер, как в известном устройстве.
Пульт 14 опе.ратора предназначен для управления работой всего тренажера. В нем имеются блок 15 управления вычислениями, блок 16 управления режимом лидирования и блок 17 индикации. Кроме того, тренажер содержит блок 18 регистрации, в котором может быть записана как видеоинформация, так и основные параметры плавания.
Работа тренажера пловцов заключается в следующем.
На пульте 14 тренер-преподаватель с помощью блока 16 управления режимом лидирования устанавливает тренировочное задание. Это задание вь1свечивается на блоке 2 задания режима лидирования, предъявляется спортсмену и подготавливает работу формирователя 3. Одновременно, с помощью блока 15 и конкретного задания корректируется модель спортсмена, заложенная в вычислителе 1, и в нее вводятся основные
параметры, характеризующие индивидуальные биомеханические характеристики спортсмена. После подготовки устройства и готовности спортсмена тренер запускает формирователь 5, спортсмен стартует, и тренажер начинает работать. Формирователь 3
О заставляет спортсмена плыть с заданной скоростью. Движения спортсмена регистрируются блоком 9.
Во время регистрации узлы 10 переключаются коммутатором 13 синхронно движе5 нию пловца и позволяют с достаточной точностью измерять координаты «опорных точек на разных участках прохождения дистанции. Такая коммутация осуществляется согласно сигналам, поступающим с измерителя 8. Наблюдение за техникой поворота
0 соверщается с помощью узла 11, который подключается к выходу блока 9 по сигналу с измерителя 6. После выполнения поворота коммутатор 13 выполняет последовательное переключение узлов 10. Сигнал на изменение режима работы коммутатора 13
поступает с датчика 7 касания. Таким образом, на выходе блока 9 постоянно присутствует информация о координатах «опорных точек спортсмена при прохождении им всех участков дистанции. Эта информа« ция, синхронно с остальными параметрами (скоростью движения, стартовыми усилиями, усилиями, развиваемыми повороте), поступает на входы вычислителя 1, отображается в блоке 17 и записывается в блоке 18. Вычислитель 1 обрабатывает эту информацию согласно заложенной модели или программе, определяет качество выполняемого движения, вычисляет оптимальный режим лидирования и автоматически корректирует режим лидирования.
Предлагаемое выполнение устройства,
позволяет расщирить его функциональные возможности, повысить качество тренировочного процесса путем, автоматической оценки биомеханических параметров движения и автоматической коррекции лидирования.
45
Формула изобретения
соединен с блоками индикации и регистрации, отличающийся тем, что, с целью повышения точности устройства за счет оценки биомеханическиххпараметров движения
и автоматической коррекции процесса лидирования, он содержит вычислитель, дополнительный блок управления, формирователь стартовых сигналов, измеритель стартовых усилий; измеритель сигналов прохождения створа и датчик касания, соединенный с блоком визуального контроля тренажа и вычислителем, который подключен к блокам задания режима лидирования, индикации и регистрации, дополнительному блоку управления, блоку визуального контроля тренажа, датчику касания и измерителям скорости плавания, сигналов прохождения створа и стартовых усилий, формирователь стартовых сигналов соединен с дополнительным блоком управления, подключенным к блоку визуального контроля тренажа, измеритель сигналов прохождения створа и датчик касания подключены к блоку визуального контроля тренажа.
Источники информации, принятые во внимание при экспертизе
Фиг.1 Z3
Фиг.2 Г
