(54) СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПАРАМЕТРОВ ЭНЕРГОСИСТЕМЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического регулирования параметра энергосистемы | 1980 |
|
SU983881A1 |
| Способ автоматического регулирования перетоков мощности | 1988 |
|
SU1697182A1 |
| Способ автоматического регулирования параметров энергосистемы "Юлика | 1984 |
|
SU1297166A1 |
| Способ автоматического регулирования частоты и перетоков мощности | 1985 |
|
SU1259404A1 |
| Способ автоматического ограничения перетока мощности электропередачи | 1990 |
|
SU1823069A1 |
| Способ регулирования перетоков мощности между энергосистемами | 1988 |
|
SU1647758A1 |
| Устройство для автоматического регулирования перетока мощности между двумя частями энергосистемы | 1978 |
|
SU864426A1 |
| Способ автоматического регулирования перетока мощности | 1990 |
|
SU1774431A1 |
| Устройство для автоматического регулирования перетока мощности между двумя частями энергосистемы | 1983 |
|
SU1120449A1 |
| Способ автоматического регулирования перетока мощности между двумя энергосистемами | 1989 |
|
SU1721703A1 |
Изобретение относится к электроэнергетике и может быть использовано для автоматического регулирования, параметров энергосистемы, например, перетока обменной мощности и частоты энергообъеди}иений.
Известны способы регулирования перетока мощности по линии Электропередач путем воздействия на задание мощности или отно сительного прироста регулирующих электростанций в функции вели1шны отклонения перетока мощности от заданного значения на основе йропорционально-иитегрально-дифференциального регулирования 1 и 2,
Недостаток указанных способов связан с тем, что фактическое долевое участие электростанвдй в регулировании отклонения контролируемого параметра изменяется в процессе отработки задания. Дело в том, что в процессе регулирования участвуют электростанции, имеющие разлишые динамические характеристики автоматического изменения мощности (различные и переменные в процессе регулирования допустимые скорости изменения мощности).
В соответствующих аналоговых системах автоматического регулирования перетоков мощности и частоты формирование интегральной составляющей регулирующего воздействия, которое в соответствующих пропорциях поступает Tia электростанции, осуществляется одним общим для всех регулирующих электростанций интеграторов. Настройку интегратора производят, исходя из требований подавления автоматической системой отклонений регулируемого па0раметра заданной амплитлды и скорости изменения. В автоматической системе каждая регулирующая электростанция, как объект управления, представляет собой следящую систему, которая должна обеспечивать изменеше своей
5 фактической мощности вслед за изменением управляющего воздействия без запаздывания или в худщем случае с постоянным запазды- . ванием, не увеличивающимся в процессе отслеживания, управляющего воздействия. При указан0ной настройке интегратора скорость изменения интегральной -составляющей регулирующего воздействия в ряде случаев превышает допустимую скорость изменения нагрузки части менее
быстродействующих электростанций. Вследствие этого на входе менее быстродействующих следящих систем возникает расходящаяся дишмическая ошибка (т.& увеличивающееся во времени запаздывание), которая ликвидируется в то время, когда отклонение регулируемого параметра подавлено изменением мощности более быстродействующих электростанций. Вре,мя ликвидации этих запаздываний определяется величиной накопленного запаздывания и динамическими возможностями объекта (электростанции).
Вследствие этого в начале процесса регулирования за счет более высокой динамики происходит значительное изменение мощности быстродействуюищх электростанций и только затем начинается изменение мощности электростанций, имеющих меньшее быстродействие.
При этом происходит обратное изменение laгрузки быстродействующих электростанций. Таким образом, регулирование производится в несколько этапов, последовательно во времени, с неоднократным перераспределением дагрузки между регулирующими электростанциями. В существующих система; автоматического управ ления, реализующих известные способы регулирования, подобный колебательный процесс неизбежен при участии в регулировании электростанций с различными, мгняющимися в процессе регулирования скоростями изменения нагрузки. Неоднократные перераспределения мощности между регулирующими злектростанциями в процессе регулирования не возникаю только при условии, что изменения активной мощности электростанций не запаздывают относительно задания, поступающего на элек станцию.
Наиболее близким к предлагаемому является способ автоматического регулировшия перетока мощности между двумя частями энергосистемы заключающийся в воздействии на зада{ше мощности или относительного аркроста регулирующих электростанций в фушсщш величины отклонения перетока, его интеграла и производной с увеличением интегральной составляющей при положительном значении отклонения, при этом при отрт(ательяом жачении отклонения перетока сигналы, пршорциональные отклонению перетока я по производной, уменьщают в заданном соотяошепюь а после снижения внтегралшой составляющей воздействия до нуля отключают сигнал по отклонению перетока, используемый для получения интегральной составляющей 3.
Этому способу присуща все недостатка известных способов.
Шль изобретения - повышшпе эковомвчнести в надежности автоматчЁСкого регулирования параметров энергосистемы например перетоков обменной мощности и частоты, путем устранения в переходных процессах излишних перераспределений нагрузки между регулирующими электростанциями.
Указанная цель достигается тем, что в способе автоматического регулирования параметров энергосистемы, например, перетоков мощности и частоты, путем формирования управляющего воздействия на задание мощности или относительного прироста регулирующих электросташщй в функции текущего отклонения регулируемого параметра, например, пропорционально-интегрально-дифференциальной, измеряют текущее значение мощности каждой регулирующей электростанции непосредственно или значение мощности на выходе модели наиболее вероятного переходного процесса автоматиздского изменения мощности этих электростанций, для каждой электростанции определяют разность между текущей величиной ее управляющего воздействия и измеренной мощностью, полученную разность умножают на коэффициент влияния изменения мощности соответствующей электростанции на регулируемый параметр, суммируют полученные произведения и изменяют текущее отклонение регулируемого праметра на величину суммы полученных произведений, взятой с отрицательным знаком, и полученный сигнал используют в качестве отклонения peryjfflpyeMoro параметра.
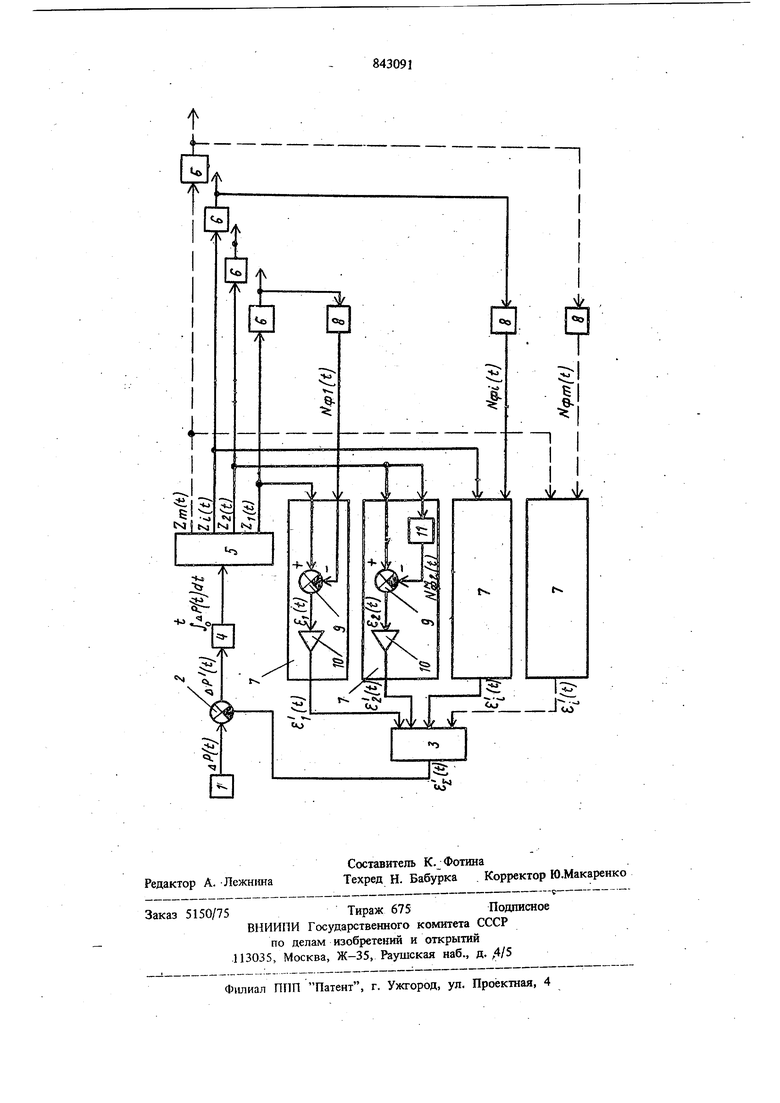
На чертеже представлена структурная схема устройства, реализующего предложенный способ для случая, когда отсутствует измерение фактической мощности одной (а именно второй) регулирующей электростанции.
Устройство содержит последовательно включенные орган 1 измерения фактического отклон шя регулируемого параметра, злемент 2 форм}фования упрежденного отклонения регулируедюго параметра, связанный по второму входу с с)гмматором 3, интегратор 4 и задатчик 5 мощкосш регулирующих электростанций. Каждь й выход задатчика 5, связанный с регулятаром мощности 6 соответствующей регулирую й электростанции, подключен к суммаtdpy 3 через один из входов последовательно вклюфгниого блока 7 формирования обратной Ьереходной фухкацт этой электростанции, связанного по другому входу с датчиком 8 фактической мощности соответствующей регулирующей электростанции. При отсутствии датчика В фактической мощности регулирующей элек1гростанций соответствующий выход задатчика 5 подключен к обоим входам блока 7 формирования обратной переходаой функции электростанции. Блок 7 з свою очередь содержит последовательно включенные элемент 9 вьпштания и усилт-ель 10 с коэффшХиентом усиления, равным коэффициенту влияния из58менения мощности соответствующей регулирую щей электростанции m регулируемый параметр Для электростанции, у которой отсутствует датчик 8 фактической мощности, в блок 7 введен дополнительно блок 11 с передаточной функцией, моделирующей переходной процесс автоматического изменения мощности этой электростанции при иэменении ей задания, выход которого подключен ко второму входу элемента 9 вычитания. Предлагаемый способ осуществляется следующим образом. Сигнал Д Р (-ь) , соответствующий фактическому отклонению регулируемого параметра, подают на один из входов элемента 2 формирования сигнала д р (t ), соответствующего упрежденному отклонению регулируемого п параметра, на второй вход которого подают сигнал (-ь ), соответствующий сумме ве , ,. ,, . личин обратных переходных функций регулиру ющих электростанций. Для формирования сигнала ё (t ) производят измерение фактической мощности каждой регулирующей электростанции, которое получают на выходе соответствующих датчиков 8 в виде сигнала Кф (tK. для каждой регулирующей электростанции формиру-а ют сигнал (t), соответствующий величине за- ,. паздывания изменения фактической мощности электростанции Мф() относительно текущего задания электростанции, которое в виде сигнала 2 (t) подают с соответствующего выхода задат1шка 5 на второй вход элемента 9 вычи тания. На выходе элемента 9 получают сигнал т (t) , определяемый по формуле. €.()-2,.и)-Мф.а; .(1) Сигнал В (t) , соответствующий величине обратной переходной функции электростанции, формируют путем изменения сигнала ё ( Ct) пропорционально коэффициенту К влияния изменения мощности электростанции на регули руемый параметр с помощью усилителя 10 по формуле ё;(tЬgl(t) (Сигнал §21 W формируют с помощью сумматора 3 по формуле (t), i-1 где щ - общее количество регулирующих электростанций. - Сигнал § Ct) подают в качестве сигнал отрицательной обратной связи (ООС) на второй вход элемента 2 формирования сигнала 6 дрС) , соответсттзующего упрежденному отклонению регулируемого параметра. При возникновении отклонения регулируемого параметра Л pCtr в установившемся режиме (закончен переходный процесс автоматического изменения мощности всех регулирующих электростанций - N4(-t)2/i),....N{(t)Z,(t),... )(i) сигнал€ Е() равен нулю и сигнал дрС) упрежденного отклонения регулируемого параметра на входе элементе 2 равен сигналу ЛP(t) фактического отклонения регулируемого параметра на одном из его входов (upCt) A p(t)l. В случае отсутствия запаздывания автоматического изменения фактической мощности всех регулирующих электростанций относительно not ступающих на электростанцию заданий в течение всего времени процесса регулирования сигнал на входе сумматора 3 равен нулю, и регулирование осуществляется по известному способу. При возникновении запаздывания автомати,,,„ , -- - .V qecKoro изменения фактической мощности, например, первой электростанции на выходе умматора 3 возникает сигнал )-Нф/):К, что приводит к упреждению изменению сигнала по отнощению к изменению сигна. . . & ( ла AP(tJ фактического отклонения регулируемого параметра на указанную величину обратной переходной функции первой регулирующей электростанции. В результате появление запаздывания автоматического изменения фактической мощности первой регулирующей электростанции приводит к упреждающему изменению до нуля сигнала ApCtJ по отношению к сигналу др(1) , останову интегратора 4 и окончанию изменения заданий всем регулирующим электростанциям При4Р -Б2-,(1) 0. В дальнейшем по мере ликвидации запаздывания в-j (t) первой регулирующей электростанцией происходит одииаковое синхрониое изменение к нулю как ДР(Ь так ) в результате чего сигнал Ap(t) сохраняет постоянно нулевое значение, и изменение заданий регулирующим электростанциям не производится. Это происходит в результате того, что изменение сигнала фактического откжжения регулируемого параметра, происходящее в результате реального влияния изменения мощности первой регулирующей электростаи1ШИ, идентично воспроизводится в изменении 78 сигнала ООС с помощью коэффициента влияния изменений мощности первой электростанции на регулируемый параметр. Таким образом, ликвидация отклонения регулируемого параметра осуществляется без неоднократных перераспределений нагрузки между регулирующими электростанциями независимо от величины запаздывания и времени его ликвидации регулирующей электростанцией. При наличии запаздывания у двух и более регулирующих электростанций способ осуществляется аналогично. В случае невозможности Измерения фактической мощности какой-либо регулирующей электростанции (например второй электростанции) используют блок if моделирования переходного процесса автоматического изменения мощности этой электростанции, на вход которого подают сигнал ) задания, пост пающий на электростанцию. На выходе блока И получают сигнал N,(i) . , моделирующий процесс автоматического изменения мощности второй электростанции, который используют вместо измерения фактической мощности регулирующей электростанции. Таким образом, использование предлагаемого способа автоматического регулирования перетоков обменной мощности и частоты энер гообъединения регулирующими электростанциями с -различными нелинейными динамическилш характеристиками обеспечивает исключение неоднократных перераспределений мощности электростанций в процессе регулирования, уменьщение износа энергетического оборудования н тем самым повыщение надежности и экономичности- автоматического регулирования В электрических сетях сложной конфигурации.« 8 1 Формула изобретения .Способ автоматического регулирования параметров энергосистемы, например перетоков мощности и частоты, путем формирования управляющего воздействия на задание мощности или относительного прироста регулируюцу« электростанций в фуякгзщ текущего отклонения регулируемого параметра, например пропорционально-интегрально-дифференциальной, от л ичающийся тем, что, с целью повышения экономичности и надежности, измеряют значение мощности каждой регулирующей электростанции непосредственно или значение мощнфти на выходе модели наиболее вероятного переходного процесса автоматического изменения мощности этой электростанции, для каждой электростанции определяют разность между текущей величиной ее управляющего воздейстВИЯ и - измеренной мощностью, полученную разность умножают на коэффициент влияния изменения мощности соответствующей электростанции на регулируемый параметр, суммируют полученные произведения и изменяют текущее отклонение регулируемого параметра на величину суммы полученных произведений, взятой с отрицательным знаком, и .полученный сигнал используют в качестве отклонения регулируемого параметра. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 505085, кл. Н 02J- 3/06, 1969. 2.Авторское свидетельство СССР № 498687, кл. Н 02Л- 3/06, 1974. 3.Авторское сввдетельство СССР № 450284, кл. Н 02 J- 3/06,1971.
