(54) СПОСОБ -АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПАРАМЕТРА ЭНЕРГОСИСТЕМЫ
1
Изобретение относится к электроэнер гетике и может быть использовано для автоматического регулирования параметра энергосистемы, в частности перетока обменной мощности и частоты энергосистемы.
Известны способы регулированияпараметра энергосистемы, в частности перетока мощности по линии электропередачи путем воздействия на задание мощности или относительного прироста регулирующих электростанций в функции величины отклонения перетока мощности от заданного значения на основе пропорционально-интегрально-дифференциальногорегулирования 1 .
Недостаток указанного способа связан, с тем, что в процессе регулирования участвуют объекты управления, например, регулирующие электростанции, имеющие различные динамические характеристики автоматического изменения своих регу- лкруемых параметров, например, мощности (различные и переменные в процессе
регулирования допустимые скорости нэменения мощности). Это приводит к тому, что процесс регулирования параметра энергосистемы протекает с неоднократ ным изменением в противоположных направлениях регулируемых параметров объектов управления, например, с неоднократным перераспределением, нагрузки между регулирующими электростанциями,
,Q что, приводит к снижению надежности автоматического регулирования в электрических сетях сложной конфигурации,, увеличению износа энергетического, оборудования и снижение экономического
f5 эффекта действия систем регулирования.
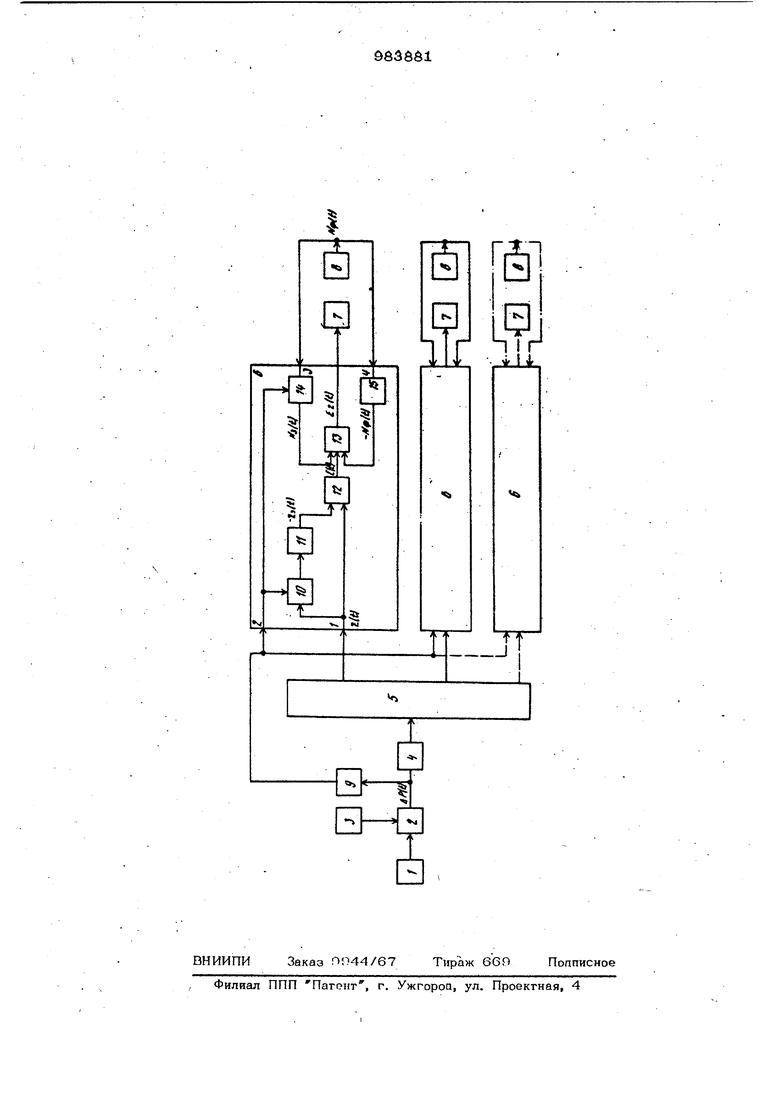
Этот процесс регулирования происходит вследствие существования на входе регуляторов менее быстродействующих объектов управления динамической ошиб20 ки, которая представляет собой разницу между текущим фактическим значением регулируемого параметра объекта управления, KOTOjpoe задаетЬя регулятором более высокого уровня, например, регул5ь« тором перетока и частоты, и фактичесi КИМ значением регулируемого параметра объекта управления. Динамическая ошибк на входе регуляторов. менее быстроде стьующих объектов управления существует и в то время, когда отклонение ре гулируемого параметра энергосистемы подавлено изменением регулируемых параметров более быстродействующих обь ектов управления, что приводи - к продолжающемуся изменению регулируемых параметров менее быстродействующих объектов управления и вступлению в работу более быстродействующих объектов управления с изменением. своих регулируемых параметров уже в противоположном направлении. Известен также способ автоматическо го регулирования параметров Энергосиотемы путем формирования управляющего воздействия на задание мощности или относительного прироста регулирующих электроста1щий в функций измененного . (упрежден ного) отклонения регулируемог параметра, например, пропорциональноинтегрально-дифференциальной f 23 . Недостаток указанного способа заклк чается в необходимости применения(использования) обратных каналов связи и устройств телемеханики при его реали- зации в системах автоматического регулирования Судаленныкш объектами управления, которые необходимы для передачи информации о текущем фактическом значении регулируемых параметров объек тов управления. Применение в этом спос бе моделей наиболее вероятного переходного процесса автоматического изменени регулируемого параметра объекта управления наиболее целесообразно и эффективно при кратковременном выходе из работы обратных каналов связи или устройств телемеханики. Поэтоглу необходимость применения и использования обратных каналов связи и устройств телемеханики при реализации указанного способа в системах автоматического регули рования параметров энергосистемы сохграняет свою актуальность, что увеличивает себестоимость создания подобных систем, себестоимость их эксплуатации и надежность их работы по мере удлинения обратных каналов связи. Наиболее близким к изобретению является способ автоматического регулирования параметра энергосистемы, в частности перетока мощности между двумя частями энергосистемы. Q S1; Этот способ автоматического регулвн рования перетока мощности заключается в воздействии на задание мощности или относительного прироста регулирующих электростанций в функции величины от клоненвя перетока, его-интеграла и производной с увеличением интегральной составляющей при положительном значении отклонения, при этом, при отрицательном значении отклонения перетока, сигналы, пропорциональные отклонению перетока и по производной, уменьщают в заданном соотношении, а после снижения интегральной составляющей воздействия до нуля отключают сигнал по отклонению перетока, используемый для получения интегральной составляющей 3. Недостатки этого способа такие же . как у вышеописанного аналога. Целью изобретения является повышение экономичности и надежности автоматического регулирования парамет ров энергосистемы , Поставленная цель достигается тем, что в способе автоматического регулирования параметра энергосистемы путем формирования управ ля к)щего воздействия на объект управления с наличием интегральной составляющей отклонения регулируемого параметра, фиксируют момент достижения регулируемым параметром энергосистемы нулевого значения и прекращают на объектах управления изменение регулируемого параметра в направлении, приводящем к достижению регу- лируемым параметром энергосистемы нулевого значения. На чертеже приведена структурная схема устройства, реализующего предлагаемый способ. Устройство содержит последовательно включенные задатчик 1 установки регулируемого параметра энерг осистемы, элемент 2 сравнения, связанный с датчиком 3 регулируемого параметра энергосистемы, пропорционально-интегрально-дифференциальнъ1й регулятор 4, задатчик 5 сигналов управляющего воздействия объектом отправления, каждый выход которого через последовательно вк/цочевн ные блоки 6 принудительного обнуления сигнала динамической ошибки, соединен с регулятором 7 соответствующего объекта управления, датчики 8 текущего фактического значения регулируемого параметра соответствующего объекта упра&ления,. выходы которых подключены к третьему и четвертому входам соответствующих блоков 6 и блок 9 определения момента изменения отклонения регулируемого параметра- энергосистемы до нуля или момента изменения его знака, связанного с выходом элемента 2, и подключенного своим выходом к вторым входам блоков 6. Блок 6 в свою очередь содержитпоследовательно включенные управлйемое зйпоминаюшее устройство 1О, инвертор 11, сумматор 12. и сумматор 13, связанный по одному из входов с j ipasляемым запоминающим устройством 14; а по другому входу - с инвертором 15. Способ осуществляется следующим образом. В исходном состоянии в момент времени -Ьо отклонение регулируемого параметра энергосистемы равно нулю и ДРС-Ьо) на выходе элемента 2 сра&нения равен нулю. На выходах задатчика 5 существуют неизменяемые во времени сигналы Z-Cto), так как лРСЬо)0. На выходе управляемого запоминающего устройства Ю существует сигнал который запомнен в момент времени fe . Сигнал Zitt-olpaBeH по величине и знаку сигналу 4.,,) Сигнал 2) проуодя через инвертор 11 изменяет свой зна на противоположный, в результате чего на выходе сумматора 12 в момент вр&мени -6(3 существует сигнал .j(-to. равный нулю 8,(4.o) IC-t)-Z(to). t) На выходе инвертора 15 существует сигнал - ГУ/Ф (-to) равный по величине и противоположный по знаку сигналу текущего фактического значения регулируемо го параметра объекта управления ) На выходе управляемого запоминающего устройства 14 существует сигнал Ы(о) который запомнен в момент времени i,Q СигналN.,(iо) равен по.величине и знак сигналу Кф{4;о Сигналы g (t) , N, (-to и - Nai(to) складываясь в сумматоре 13 дают на его выходе сигнал 2(р) , равный нулю; ч .о)--iC-fc о)-2b(to) ). Сигнал f З-С-Ьо является входным сиз налом регулятора 7, который при нулевом сигнале не производит измнения ре- . гулируемого параметра объекта управления. При возникновении отклонения регулируемого параметра энергосистемы |ДР( на весь период времени его .регулирования до момента т- , пока о- клонение регулируемого параметра энер- осистемы не изменит знак или не стаг авным нулю, на выходе управляемых апоминающих устройств 1О и 14 сохраняются сигналы, запомненные в момент вр&мени to - соответственно TjC-fe) и М(о) ПрилРОО Она выходе задатчйка 5 существует сигнал 2.() соответ ствующий текущему отклонению лРС-fc} . В результате, на выходе сумматора 12 возникает отличный от нуля сигнал f Ш , знак и величина которого будет соответ- ствовать требуемому направлению и в&личине изменения регулируемого парамет ра объекта управления. C V-lC-b)-7,,C-t) . СЗ На выходе сумматора 13 также возникнет отличный от нуля сигнал гС-ЬЛ который по зраку будет соответствовать знаку сигнала (4;) , а его величина будет зависеть от динамических свойств объекта управления. Ct)--Z(-fc)- аС-Ьо),,(-Ьо)-МфС-1).(4) При достижении отклонением регулируемого параметра энергосистемы, в моivieHT времени i:, значения; ноль /Ap(t,) 0/, блок 9 определения момента изм&нения до нуля или момента изменения знака отклонения регулируемого napaMeiv. pa энергосистемы, сформирует на своем выходе импульсный сигнал достаточной длительности, по которому управляемые запоминающие устройства 10 и 14 осуществляют перезапись в памяти значение текущих входных сигналов на момент времени -t-t . В результате на выходе сумматор 12 и 13 в момент времени произойдет обнуление сигналов € 4p-za,)-z3Ci,)-, ) ex(ii)-2Cii)-:z:3XiO N(t,)-N0(ti).(6r Нулевой сигнал на входе регулятора 7 приводит к прекращению изменения регулируемого параметра объекта управле ния в направлении, приведшем к ликвиден ции отклонения регулируемого параметра энергосистемы в момент времени t , когда Фактическое отклонение регулируемого параметра энергосистемы стало равным нулю /ДР (t ) 0/ и дальнейшее изменение регулируемого параметра объекта управления в преяонем направлении привело бы к его перерегулированию. Таким образом, начиная с момента времени Ь , регулятор 7 стабилизирует параметр объекта управления около значеНИИ, равного текущему фактическому значению регулируемого параметра объек та в момент времени 4f . Если в момент времени -t произойдет не обнуление сигнала ) t а-изменение его знака, то по сигналу от блока 9 произойдет перезаписьпамяти управляемых запоминающих устройств i аналогично вышеизложенному. В этом случае сигналы ) iC-ti момент времени Ъ также будут равны нулю. Иоменение знака отклонения регулируемого параметра энергосистемы приведет к перемене направления изменения сигнала управляющего воздействия, в результате чего начиная с.момента времени и далее изменяются знаки сигналов eUVAt) ei() )2l(ti-fAt)-i5(-ti)-, (7; k(.ii I Ci 1 + (1 N3i.ti)-N(,VAt. В результате начиная с момента време ни-fc -fut , одновременно с изменением знака сигнала управляющего воздействия происходит тождественное изменение знака на входе регулятора 7, что приводит к одновременному изменению направления регулирования пар 1метра объекта управления. Таким образом, предлагаемый способ позволяет повысить экономичность и надежность автоматического регулирования параметров энергосистемы за счет уст ранения в переходных процессах регулирования неоднократных изменений в противоположных направлениях регулируемых параметров объектов управления. Формула изобретения Способ автоматического регулирования параметра энергосистемы путем формирования управляющего воздействия на объекты управления с наличием интегральной составляющей отклонения регулируемого параметра, отличающийся тем, что, с целью повыщения экономичности и надежности, фиксируют момент достижения регулируемым параметром энергосистемы нулевого значения и прекращают на объектах управления изменение регул1фу- eMoiro параметра в направлении, приводящем к достижению регулируемым параметром энергосистемы нулевого значения. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 5О5О85, кл. Н О2 7 3/06, 1969. 2.Авторское свидетельство СССР № 843О91, кл. Н 02 J 3/О6, 1979. 3.Авторское свидетельство СССР № 450284, кл. Н 02 j 3/06, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического регулирова-Ния пАРАМЕТРОВ эНЕРгОСиСТЕМы | 1979 |
|
SU843091A1 |
| Устройство для задания внеплановой нагрузки электростанции | 1980 |
|
SU1065955A1 |
| Способ автоматического регулирования параметров энергосистемы "Юлика | 1984 |
|
SU1297166A1 |
| Способ автоматического регулирова-Ния пЕРЕТОКА МОщНОСТи МЕжду дВуМячАСТяМи эНЕРгОСиСТЕМы | 1979 |
|
SU843092A1 |
| Способ автоматического регулирования параметров энергосистемы | 1986 |
|
SU1467664A1 |
| Устройство для автоматического регулирования перетока мощности между двумя частями энергосистемы | 1978 |
|
SU864426A1 |
| Устройство для автоматического регулирования перетока мощности между двумя частями энергосистемы | 1983 |
|
SU1120449A1 |
| Устройство для автоматического регулирования частоты и перетока активной мощности энергообъединения | 1983 |
|
SU1136250A1 |
| Способ регулирования перетоков мощности в объединенной энергосистеме | 1985 |
|
SU1277297A1 |
| Способ автоматического регулирования перетока мощности межсистемной электропередачи | 1989 |
|
SU1809490A1 |