(54) ПРИВОД АГРЕГАТА ДЛЯ ПРОИЗВОДСТВА ХИМИЧЕСКИХ МОНОНИТЕЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования скорости намотки нити | 1975 |
|
SU553183A1 |
| МАЛОГАБАРИТНЫЙ ВЫСОКООБОРОТНЫЙ СУДОВОЙ ГЕНЕРАТОРНЫЙ АГРЕГАТ | 2015 |
|
RU2617713C2 |
| Устройство для регулирования скорости намотки нити | 1972 |
|
SU454158A1 |
| Статический преобразователь частоты для синхронного электропривода | 1983 |
|
SU1164847A1 |
| Электропривод с синхронным двигателем | 1974 |
|
SU658690A1 |
| Устройство для регулирования уровня расплава полиамида | 1980 |
|
SU991379A1 |
| Электропривод переменного тока | 1987 |
|
SU1453566A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ ТОПЛИВНО-РЕГУЛИРУЮЩЕЙ АППАРАТУРЫ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ | 1991 |
|
RU2008642C1 |
| Система регулирования электропривода насосного агрегата и способ работы системы | 2018 |
|
RU2687175C1 |
| АСИНХРОННЫЙ ВЕНТИЛЬНЫЙ КАСКАД | 2011 |
|
RU2474951C1 |
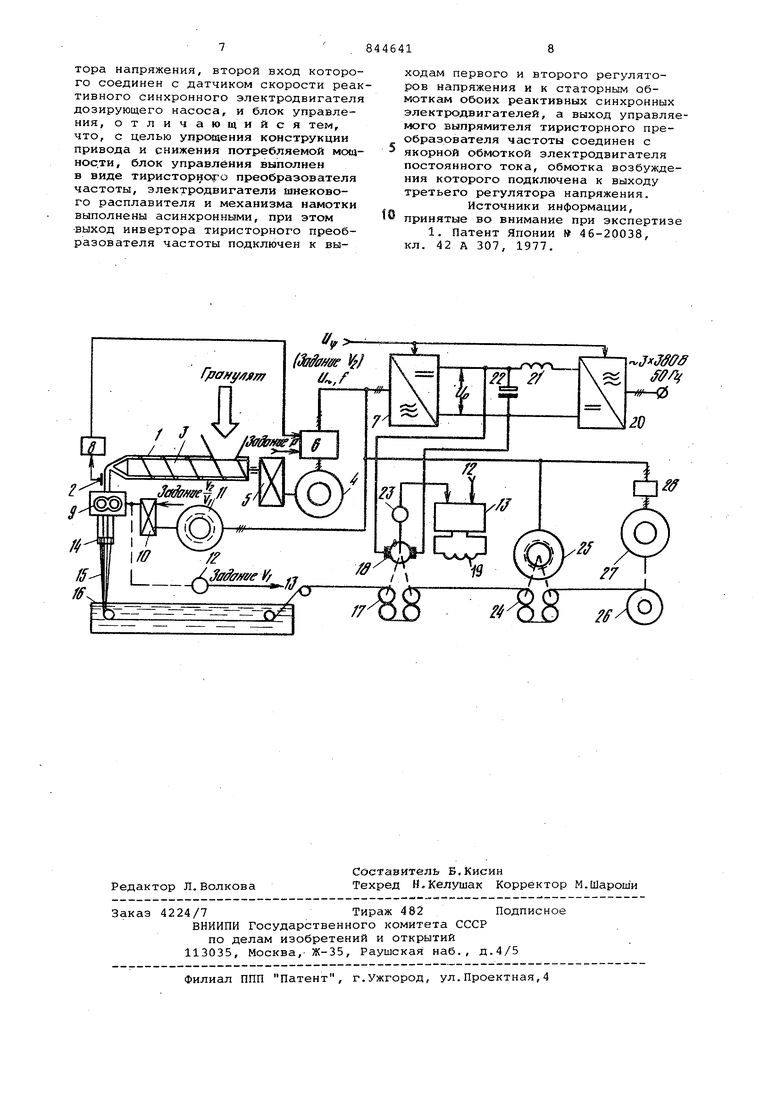
Изобретение относится к производс ву химических мононитей из расплавов полимеров, а именно к агрегатам для производства химических мононите и может быть использовано также с мн годвигательными приводами, например, на агрегатах для производства штапельных волокон из растворов и в подобных установках, где требуется согласованное движение нескольких ра бочих механизмов. Известен привод агрегата для производства химических мононитей, с держащий электродвигатель шнекового расплавителя, статорная обмотка которого соединена с выходом первого регулятора напряжения, электродвигатель механизма намотки, статорная об мотка которого подключена к выходу второго регулятора напряжения, реактивные синхронные электродвигатели дозирующего насоса и выпусктлх цилиндров, электродвигатель постоянного тока, вал которого кинематически связан с входными цилиндрами и с тахогенератором, электрически связанным с первым входом третьего регулятора напряжения, второй вход которого соединен с датчиком скорости реактивного синхронного электродвигателя дозирующего насоса и блок управления . Недостаток известного привода заключается в сложности выполнения блока управления, состоящего из узлов индивидугшьного управления каждого двигателя, и в большом потреблении мсмдности. Цель изобретения - упрощение конЬтрукции привода и снижение потребляемой мощности. Поставленная цель достигается тем, что блок управления выполнен в виде тиристорного преобразователя частоты, электродвигатели шнекового расплавителя и механизма намотки выполнены асинхронныг при этом выход инвертора тиристорного преобразователя частоты подключен к выходам первого и второго регуляторов напряжения и к статорным обмоткам обоих реактивных синхронных электродвигателей, а выход управляемого выпрямителя тиристорного преобразователя частоты соединен с якорной обмоткой двигателя постоянного тока, обмотка возбуждения которого подключена к выходу третьего регулятора напряжения. На чертеже изображена структурная функциональная схема предлагаемого привода агрегата. Привод содержит шнековый расплавитель 1, на выходе которого установ лен датчик 2 давления расплава полимера. Шнек. 3 расплавителя приводится во вращение специальным асинхронным трехфазным электродвигателем 4 через механический редуктор 5. Статорная обмотка электродвигателя 4 через регулятор напряжения б подключена к выходу трехфазного автономного инвертора 7. Регулятор напря жения 6 выполнен на основе магнитного усилителя и имеет два выхода. На один вход регулятора 6 подводится аналоговый электрический сигнал, про порциональный требуемой величине дав ления на выходе шнекового расплавите ля (задание Р), а на другой вход сигнал, пропорциональный фактической величине давления, измеряемой датчиком 2 и преобразованной преобразователем 8. Таким образом создан замкнутый контур регулирования давления на выходе шнекового расплавителя. Последний соединен распла вопроводом с дозирующим насосом 9 шестеренчатого типа, приводимым посредством подстроечного редуктора 10 во вращение от электродвигателя 11. С валом подстроечного редуктора 10 связан тахогенератор 12, вырабатываю щий аналоговый электрический сигнал, подводимый на вход регулятора напряжения 13. Электродвигатель 11 выполнен трехфазным синхронным реактивным Его статорная обмотка подключена к в ходу инвертора 7. На выходе насоса 9 установлена фильера 14. Образующиеся при истечении расплава через фильеру нити 15 поступают в охлаждающую ванну 16. Далее нити поступают на питающие вхо ные транспортирукндие цилиндры 17, приводимые во вращение электродвигателем 13 постоянного тока с обмоткой независимого возбуждения 19. Якорь электродвигателя 18 подключен к выходу управляемого выпрямителя 20 через индуктивно-емкостной фильтр состоящий из дросселя 21 и конденсатора 22. С валом электродвигателя 18 связан тахогенератор 23, вырабаты вакяций аналоговый электрический сигнал, подводимый на вход регулятора напряжения 13 встречно сигналу за дания величины скорости входных тран спортнрующих цилиндров (задание VJ поступающего от тахогенератора 12. Выпускные транспортирующие цилиндры 24 снабжены синхронным реактивным электродвигателем 25, статорная обмотка которого подключена к инвертору 7. Механизм намотки нити на бобину 26 включает асинхронный электродвигатель 27 повышенного скольжения. Ст торная обмотка . этого двигателя подключена к выходу инвертора через регулятор напряжения 28. Привод работает следующим образом. Поступающий в шнековый расплавитель гранулят плавится и с определенным давлением, регулируемым по заг-в нутому контуру, нагнетается на вход дозирующего насоса 9. Последний продавливает расплав сквозь отверстия фильеры 14. Выйдя из фильеры, расплав застывает в охлаждающей ванне 16 в виде мононитей 15. Фильерная вытяжка осуществляется транспортирующими цилиндрами 17, окружная скорость которых в десятки раз превосходит скорость истечения расплава из фильеры. Так как на вход регулятора 13 напряжения, питающего обмотку возбуждения электродвигателя 18, поступают сигналы от тахогенераторов 23 и 12, причем последний вырабатывает сигнал задания, то величина фильерной вытяжки стабилизируется по замкнутому контуру и не зависит от абсолютных частот вращения приводного вала дозирующих насосов и транспортирующих цилиндров 17. Изменение величины фильерной вытяжки осуществляется при настройке с помощью делителя напряжения (не показан)сигнала тахогенератора 12. Дсшее нить 15 поступает на вытяжные выпускные транспортирующие цилиндры 24, которые приводятся во вращение синхронным реактивным электродвигателем 25. Окружная скорость этих цилиндров в 3-5 раз превышает скорость подачи нити питающими цилиндрами 17. Вытягивание нити происходит за счет разности этих скоростей. Двигатель 25 подключен к выходу инвертора 7. Вытянутая нить наматывается на бобину 26 с помощью наметывающего устройства (не показано), приводимого в движение асинхронным электродвигателем 27, статоркая обмотка которого через регулятор 28 напряжения подключена к выходу инвертора 7. Асинхронный электродвигатель 27 имеет ротор специальной конструкции, обеспечивающий работу двигателя в области больших скольжений при достаточном моменте на валу. По мере увеличения диаметра бобины 26 момент сопротивления, обусловленный натяжением нити на участке вытяжные цилиндры - бобина, возрастает за счет роста диаметра бобины. Это приводит к увеличению скольжения ротора двигателя 27 и к снижению частоты вращения бобины. При этом, если правильно выбраны параметры роторной клетки двигателя 27, натяжение нити практически изменяется в небольших пределах, а скорость намотки остается постоянной. Беличина натяжения нити определяется напряжением и частотой переменного тока, питающего обработку статора двигателя 27. Эти зависят от напряжения U и частоты. на выходе инвертора 7. При постоянной величине скольжения момент двигателя 27 тем больше, чем выше отношение ii. Это отношение может быть изменено с помощью регулятора 28, выполненного на магнитном усилителе Благодаря такому устройству натяжение нити при намотке остается практически постоянным и не -изменяется при переходе агрегата с заправочной скорости на рабочую. Посленее объясняется следующим.
Тиристорный преобразователь частоты, состоящий из управляемого выпрямителя 20, сглаживающего фильтра (дроссель 21 и конденсатор 22) и автономного инвертора 7, обеспечивает на выходе последнего с высокой точностью отношение j- . Величины и и f пропорциональны величине аналогового электрического сигнала (задание / поступающего на вход выпрямителя и инвертора. При этом величина напряжения U переменного тока пропорциональна выпр ленному напряжению Ug , снимаемому с выхода управляемого выпрямителя через сглаживающий фильтр. Так как двигатели 25 и 27 получают питание от общего преобразователя, то при изменении частоты питающего напряжения синхронные частоты вращения этих двигателей изменяются пропорционально друг другу. Благодаря такому решению скольжение ротора двигателя 27 при намотке мононити на бобину 26 изменяется незначительно и режим его работы облегчаетгся. Это позволяет также выбрать на меньшую мощность регулятор 28 напряжения, снизить потери электроэнергии в регуляторе 28 и двигателе 27.
Выпускаемые тиристорные преобразователи частоты со звеном постоянного тока обеспечивают диапазон регулирования выходной частоты и напряжение 20:1 и более. Благодаря этому агрегат может работать как на пониженной заправочной скорости (25 м/мин), так и на максимальной рабочей (400-500 м/мин) Управление преобразователя осуществляется аналоговым сигналом в виде напряжения постоянного тока U. Величина напряжения 1) определяет частоту f на выходе инвертора 7 и, следовательно, скорость Vj нити на выходных транспортирующих цилиндрах 24 . Отношение скоростей Vj/V является кратностью вытяжки нити и плавно регулируется подстроечным редуктором 10. Регулировка кратности вытяжки подстроенным редуктором 10 позволяет сохранить максимальную выходную скорость намотки мононитей на бобину 26, так как при этом через посредство тахогенератора 12 скорость приемных транспортирующих цилиндров, приводимых во вращение двигателем 18, изменяется так, чтобы фильерная вытяжка ост.алась неизменной (пропорциональное слежение) .
Так как момент нагрузки на валу электродвигателя 18 совпадает с
0 направлением вращения, то электродвигатель работает в генераторном режиме. ЭДС якоря превышает величину
напряжения UQ и направлена противоположно ему. Ток якоря в этом случае
5 определяется усилием вытягивания нити и потребляется через автономный инвертор 7 двигателями переменного тока. Благодаря этому потери рекуперируемой энергии малы, так как
0 КПД инвертора достаточно высок (9095%), и энергетические показатели привода агрегата улучшаются. Мощность электродвигателя 18 в 3-5 раз меньше мощности электродвигателя 25, так как скорость цилиндров 17 в 355 раз меньше скорости цилиндров 24. Например, в предлагаемом агрегате электродвигатель 18 устанавливается типа ПЕСТ 53, 1000 об/мин, 440 В, 3,3 кВт. Условия его работы облегчены
0 малой величиной частоты вращения в номинальном режиме и электродвигатель 18 может работать достаточно надежно. Электродвигатель 25 должен быть более быстроходным и выполняется бесконтактным синхронным реактивным.
Поскольку в предлагаемом агрегате двигатели, дозирующего насоса и выходных транспортирующих цилиндров синх0ронные и реактивные и подключены параллельно друг другу к выходу инвертора 7, то во всем диапазоне регулирования скорость формования нити строго пропорциональна скорости ее вцпуска и наматывания.
Формула изобретения
1
Привод агрегата для производства химических мононитей,,содержащий электродвигатель шнекового расплавителя, статорная обмотка которого соединена с выходом первого регуля5тора напряжения, электродвигатель механизма намотки, статорная обмотка которого подключена к выходу второго регулятора напряжения, реактивные синхронные электродвигатели дозирующего насоса и выпускных цилиндров, электродвигатель постояного тока, вал которого кинематически связан с входными цилиндрами и с тахогенератором,электрически связанным с первым входом третьего регулятора напряжения, второй вход которого соединен с датчиком скорости реактивного синхронного электродвигателя дозирующего насоса, и блок управления, отличающийся тем, что, с целью упрсмйения конструкции привода и снижения потребляемой мощнос.ти, блок управления выполнен в виде тиристорнозго преобразователя частоты, электродвигатели шнекового расплавителя и механизма намотки выполнены асинхронными, при этом выход инвертора тиристорного преобразователя частоты подключен к выходам первого и второго регуляторов напряжения и к статорным обмоткам обоих реактивных синхронных электродвигателей, а выход управляемого выпрямителя тиристорного преобразователя частоты соединен с якорной обмоткой электродвигателя постоянного тока, обмотка возбуждения которого подключена к выходу третьего регулятора напряжения.
Источники информации, принятые во внимание при экспертизе
,JxJ&0ff
