Изобретение относится к области моделирования газотурбинных двигателей (ГТД) и испытаний топливно-регулирующей аппаратуры (ТРА).
Известны полунатурные стенды для испытаний агрегатов ГТД, содержащие аналоговую модель ГТД, испытуемый агрегат, датчик расхода топлива с преобразователем, электропривод постоянного тока с редуктором, реализующий функцию преобразования координаты модели ГТД в реальную частоту вращения [1] .
Недостатком известных стендов является использование в них электроприводов на основе электродвигателя постоянного тока, который из-за ограничений, накладываемых его коллектором на скорость изменения тока якоря  и максимальную частоту вращения (не выше 1500 об/мин) не позволяет получить необходимое для обеспечения требуемой динамической точности преобразования координаты модели ГТД быстродействие и имеет большие по сравнению с приводимыми агрегатами габариты, массу, низкие эксплуатационные показатели, обусловленные необходимостью применения повышающего редуктора.
и максимальную частоту вращения (не выше 1500 об/мин) не позволяет получить необходимое для обеспечения требуемой динамической точности преобразования координаты модели ГТД быстродействие и имеет большие по сравнению с приводимыми агрегатами габариты, массу, низкие эксплуатационные показатели, обусловленные необходимостью применения повышающего редуктора.
Наиболее близким к предложенному является стенд для испытаний топливно-регулирующей аппаратуры газотурбинных двигателей, содержащий связанную с испытуемым агрегатом синхронную электрическую машину, датчик положения ротора и тахогенератор, связанные с валом синхронной электрической машины, секции обмотки якоря которой подключены через инвертор и сглаживающий дроссель к выходу выпрямителя, а обмотка возбуждения - к системе регулирования тока возбуждения, выполненной в виде датчика тока возбуждения, соединенного с первым входом регулятора тока возбуждения, и тиристорного возбудителя, соединенного через систему импульсно-фазового управления с выходом регулятора тока возбуждения, второй вход которого соединен с датчиком выпрямленного тока и первым входом регулятора выпрямленного тока, выход которого через систему импульсно-фазового управления выпрямителя соединен с управляющим входом выпрямителя, связанный с тахогенератором регулятор частоты вращения ротора, выход которого соединен с вторым входом регулятора выпрямленного тока и через релейный элемент - с первым входом блока управления инвертором, второй вход которого связан с датчиком положения ротора, а выход - с системой импульсно-фазового управления инвертором, выходы которой соединены с управляющими входами инвертора [2] .
Недостатком такого стенда является характерная для зависимых инверторов склонность к аварийным режимам вызванным опрокидыванием ("прорывами") инвертора, когда действительное значение угла управления инвертором β, превосходит установленное блоком управления значение β.
Например, в динамических режимах при разгоне или переходе с меньшей частоты вращения на большую испытуемого агрегата оператором могут задаваться такие приращения сигнала частоты вращения, которые вызовут приращение выпрямленного тока, определяющие в соответствии с известным выражением
β = arccos (1) где U
(1) где U - выходное напряжение управляемого выпрямителя;
- выходное напряжение управляемого выпрямителя;
n - частота вращения;
Uл - линейное напряжение на обмотке статора двигателя;
I - выпрямленный ток;
- выпрямленный ток;
K2=  ·
·  - коэффициент, учитывающий зависимость индуктивного сопротивления синхронной машины Xан от частоты вращения;
- коэффициент, учитывающий зависимость индуктивного сопротивления синхронной машины Xан от частоты вращения;
K3=  - коэффициент, определяемый мостовой схемой инвертора, значение β, превышающее установленные блоком управления инвертором.
- коэффициент, определяемый мостовой схемой инвертора, значение β, превышающее установленные блоком управления инвертором.
Возникающий при этом режим опрокидывания ("прорыва") инвертора приводит к аварийному отключению управляемого выпрямителя, а следовательно, и стенда, что влечет необходимость повторения испытаний ТРА сначала, увеличение материальных затрат, рост доли некондиционных испытаний.
Целью изобретения является повышение надежности стенда для испытаний ТРА ГТД путем исключения опрокидывания инвертора.
Указанная цель достигается тем, что в стенд для испытаний топливно-регулирующей аппаратуры газотурбинных двигателей, содержащий связанную с испытуемым агрегатом синхронную электрическую машину, датчик положения ротора и тахогенератор, связанные с валом синхронной электрической машины, секции обмотки якоря которой подключены через инвертор и сглаживающий дроссель к выходу выпрямителя, а обмотка возбуждения - к системе регулирования тока возбуждения, выполненной в виде датчика тока возбуждения, соединенного с первым входом регулятора тока возбуждения, и тиристорного возбудителя, соединенного через систему импульсно-фазового управления с выходом регулятора тока возбуждения, второй вход которого соединен с датчиком выпрямленного тока и первым входом регулятора выпрямленного тока, выход которого через систему импульсно-фазового управления выпрямителя соединен с управляющим входом выпрямителя, связанный с тахогенератором регулятор частоты вращения ротора, выход которого соединен с вторым входом регулятора выпрямленного тока и через релейный элемент - с первым входом блока управления инвертором, второй вход которого связан с датчиком положения ротора, а выход - с системой импульсно-фазового управления инвертором, выходы которой соединены с управляющими входами инвертора, введены два датчика напряжения, вычислитель угла управления тиристорами инвертора, компаратор, два управляемых ключа, датчик расхода топлива и электронная вычислительная машина, причем датчик расхода топлива соединен через электронную вычислительную машину с вторым входом регулятора частоты вращения ротора, первый вход вычислителя угла управления тиристорами инвертора соединен с датчиком выпрямленного тока, второй вход - с выходом первого датчика напряжения, подключенного к выходу управляемого выпрямителя, третий вход - с выходом второго датчика напряжения, подключенного к двум фазам синхронной электрической машины, четвертый вход - с выходом тахогенератора, а выход - с входом компаратора, выход которого соединен с входом первого управляемого ключа, выходы которого соединены с вторым и третьим входами регулятора выпрямленного тока, и входом второго управляемого ключа, выходы которого соединены с первым и третьим входами регулятора тока возбуждения.
Новым в стенде является то, что введение двух датчиков напряжения, вычислителя угла управления тиристорами инвертора, компаратора, двух управляемых ключей, датчика расхода топлива и электронной вычислительной машины с контролем фактического значения угла управления тиристорами инвертора при помощи вычислителя этого угла и сравнением его с заданным значением при помощи компаратора позволяет при приближении фактического значения угла β к заданному и вырабатывать команду на снижение выпрямленного тока и увеличение тока возбуждения при сохранении момента путем перестройки коэффициентов усиления регуляторов выпрямленного тока и тока возбуждения по соответствующим входам, устранить этим опасность "опрокидывания" инвертора и соответственно повысить надежность стенда.
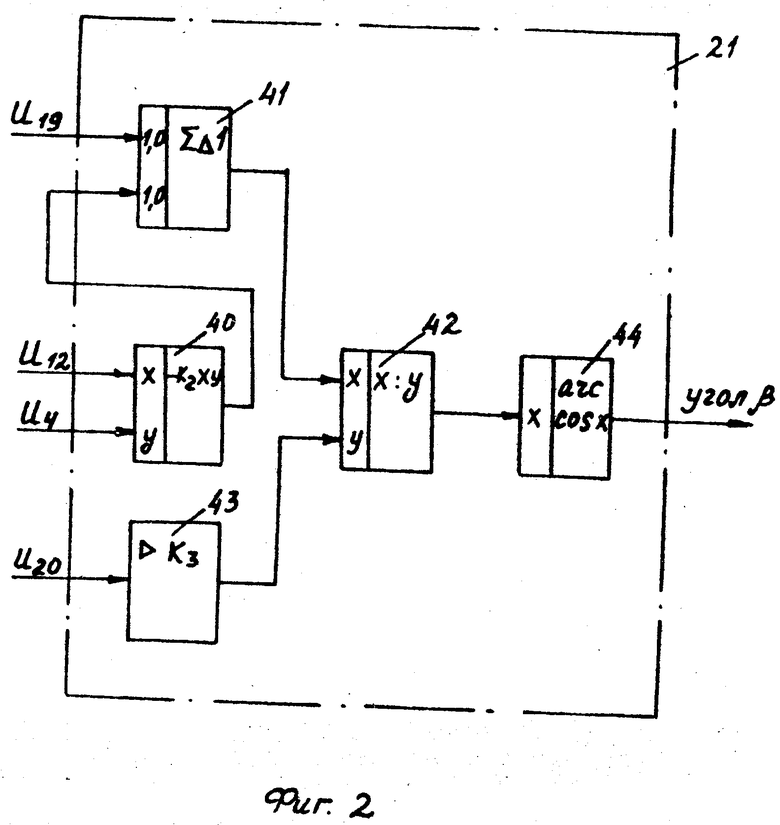
На фиг. 1 изображена структурная схема стенда для испытаний ТРА ГТД, на фиг. 2 - структурная схема вычислителя угла управления тиристорами инвертора.
Стенд для испытаний топливно-регулирующей аппаратуры газотурбинных двигателей содержит связанную с испытуемым агрегатом 1 синхронную электрическую машину 2, датчик 3 положения ротора и тахогенератор 4, связанные с валом синхронной электрической машины 2, секции обмотки якоря которой подключены через инвертор 5 и сглаживающий дроссель 6 к выходу выпрямителя 7, а обмотка возбуждения - к системе регулирования тока возбуждения, выполненной в виде датчика 8 тока возбуждения, соединенного с первым входом регулятора 9 тока возбуждения и тиристорного возбудителя 10, соединенного через систему 11 импульсно-фазового управления с выходом регулятора 9 тока возбуждения, второй вход которого соединен с датчиком 12 выпрямленного тока и первым входом регулятора 13 выпрямленного тока, выход которого через систему импульсно-фазового управления 14 выпрямителя соединен с управляющим входом выпрямителя 7, связанный с тахогенератором 4 регулятор 15 частоты вращения ротора, выход которого соединен с вторым входом регулятора 13 выпрямленного тока и через релейный элемент 16 - с первым входом блока 17 управления инвертором, второй вход которого связан с датчиком 3 положения ротора, а выход - с системой 18 импульсно-фазового управления инвертором, выходы которой соединены с управляющими входами инвертора 5.
Кроме этого, стенд содержит первый 19 и второй 20 датчики напряжения, вычислитель 21 угла управления тиристорамми инвертора, компаратор 22, первый 23 и второй 24 управляемые ключи, датчик 25 расхода топлива и электронную вычислительную машину 26, причем датчик 25 расхода топлива соединен через электронную вычислительную машину 26 с вторым входом регулятора 15 частоты вращения ротора, первый вход вычислителя 21 угла управления тиристорами инвертора соединен с датчиком 12 выпрямленного тока, второй вход - с выходом первого датчика 19 напряжения, подключенного к выходу управляемого выпрямителя 7, третий вход - с выходом второго датчика 20 напряжения, подключенного к двум фазам синхронной электрической машины 2, четвертый вход - с выходом тахогенератора 4, а выход - с входом компаратора 22, выход которого соединен с входом первого управляемого ключа 23, выходы которого соединены с вторым и третьим входами регулятора 13 выпрямленного тока и входом второго управляемого ключа 24, выходы которого соединены с первым и вторым входами регулятора 9 тока возбуждения.
Регулятор 13 выпрямленного тока выполнен на операционном усилителе 27, цепь задания которого образована резистором, состоящим из последовательно соединенных первой 28 и второй 29 секций, причем секция 28 образует второй, а секция 29 - третий входы регулятора 13. В цепи обратной связи по выпрямленному току установлен резистор 30, а цепь обратной связи усилителя 27 состоит из резистора 31 и конденсатора 32.
Регулятор 9 тока возбуждения выполнен на операционном усилителе 33, в цепь задания по выпрямленному току которого включен резистор 34, в цепь обратной связи по току возбуждения установлен резистор, состоящий из последовательно соединенной первой 35 и второй 36 секций, причем секция 35 образует первый, а секция 36 - третий входы регулятора 9. В цепь задания тока возбуждения установлен резистор 37, а цепь обратной связи усилителя 33 состоит из резистора 38 и конденсатора 39.
Вычислитель 21 угла управления тиристорами инвертора (см. фиг. 2) вычисляет фактическое значение угла управления тиристорами инвертора β в соответствии с выражением (1) и состоит из инвертирующего перемножителя 40, в котором перемножаются сигналы от датчика 12 выпрямленного тока и от тахогенератора 4 с коэффициентом усиления К2, сумматора 41, в котором складывается результат перемножения в перемножителе 40 с сигналом от датчика 19 выпрямленного напряжения, делителя 42, осуществляющего деление выходного сигнала сумматора 41 на выходной сигнал усилителя 43 с коэффициентом усиления К3, на вход которого поступает сигнал от датчика 20 напряжения на обмотке статора синхронной машины 2, блока 44 арккосинуса, осуществляющего вычисление функции арккосинуса по значениям аргумента от делителя 42. Выходом блока 44 является действующее в системе стенда фактическое значение угла управления тиристорами инвертора β.
Компаратор 22 может быть выполнен на операционном усилителе. Входом управления компаратора в рассматриваемом случае является сигнал задания угла β, а входом - выход вычислителя 21 угла β.
Управляемые ключи 23 и 24 могут быть выполнены на интегральных микросхемах. При нулевом сигнале на их управляющем входе ключи 23 и 24 открыты.
Стенд работает следующим образом.
Изменение положения ручки сектора газа αруд. ведет к изменению текущего расхода топлива испытуемого агрегата 1. Предположим, что ручка сектора газа αруд переводится в положение, соответствующе увеличению топлива ΔGт+. Это приращение ΔGт+ по каналу датчика 25 расхода топлива дает сигнал задания UG для электронной вычислительной машины 26, которая воспроизводит математическую модель ГТД. Выходной сигнал модели Ung, являющийся аналогом частоты вращения вала турбины и поступающий на второй вход регулятора 15 частоты вращения, который до этого уравновешивался сигналом фактического значения частоты вращения от тахогенератора 4, поступающим на первый вход регулятора 15 (статический режим), увеличится относительно сигнала от тахогенератора и вызовет увеличение выходного сигнала регулятора 15 с положительным знаком (динамический режим). Выходной сигнал регулятора 15 частоты вращения поступает на вход релейного элемента 16, на выходе которого появляется единичный сигнал положительной полярности. По этому сигналу блок 17 управления инвертором дает команду на поступление импульсов от датчика 3 положения полюсов ротора в систему 18 импульсно-фазового управления инвертором в порядке, соответствующем двигательному режиму, и с углом управления β , определяемым коммутационной устойчивостью инвертора 5, исходя из широко известного соотношения
β ≥ γu + δu (2) где δu - угол запирания, необходимый для восстановления запирающих свойств тиристоров инвертора 5, с запасом на погрешность СИФУ инвертора, значения δu принимаются равными 10-15о.
γu - угол коммутации, в течение которого происходит переход тока с тиристора, выходящего из работы, на тиристор, вступающий в работу, определяется сверхпереходным индуктивным сопротивлением синхронной электрической машины 2 и выпрямленным током I , который определяется статическим методом стенда и динамическим моментом, зависящим от требуемого быстродействия, а значит и динамической точности. В инверторном режиме работы инвертора 5 угол γu не можете превышать 60о, при γu > 60о наступает "прорыв" инвертора.
, который определяется статическим методом стенда и динамическим моментом, зависящим от требуемого быстродействия, а значит и динамической точности. В инверторном режиме работы инвертора 5 угол γu не можете превышать 60о, при γu > 60о наступает "прорыв" инвертора.
Таким образом, максимальное значение угла β не рационально устанавливать больше 60о + 15о = 75о. Обычно с учетом запаса величина β не превышает 60о.
Величина выходного сигнала регулятора 15 частоты вращения ротора служит также заданием для регулятора 13 выпрямленного тока и сравнивается на его входе с сигналом от датчика 12 выпрямленного тока. Выходной сигнал редуктора 13, определяемый результатом сравнения, воздействует на систему 14 импульсно-фазового управления выпрямителем 7, устанавливая значения его выходного напряжения, соответствующее заданной ЭВМ 26 частоте вращения.
Сигнал задания тока возбуждения Uзтв, суммируясь на входе регулятора 9 тока возбуждения с сигналом от датчика 12 выпрямленного тока, сравнивается с сигналом от датчика 8 тока возбуждения. Выходной сигнал регулятора 9 воздействует на вход системы 11 импульсно-фазового управления возбудителем 10, определяя требуемое значение тока возбуждения.
Вычислитель 21 угла управления тиристорами инвертора β, вычисляет по сигналам датчика 12 выпрямленного тока, датчика 19 выпрямленного напряжения, датчика 20 напряжения на обмотке статора синхронной машины 2 и тахогенератора 4 фактическое значение угла β в соответствии с формулой (1). Результат вычисления сравнивается на входе компаратора 22 с сигналом задания угла U , (вход управления компаратора), величина которого выбирается несколько меньшей 60о. Если выходной сигнал вычислителя 21 меньше, чем сигнал U
, (вход управления компаратора), величина которого выбирается несколько меньшей 60о. Если выходной сигнал вычислителя 21 меньше, чем сигнал U , то на выходе компаратора 22 присутствует нулевой сигнал, первый 23 и второй 24 управляемые ключом открыты, шунтируя соответственно секцию 28 резистора в цепи задания регулятора 13 выпрямленного тока и секцию 35 резистора в цепи обратной связи по току возбуждения регулятора 9 тока возбуждения. При этом стенд работает в описанном нормальном режиме.
, то на выходе компаратора 22 присутствует нулевой сигнал, первый 23 и второй 24 управляемые ключом открыты, шунтируя соответственно секцию 28 резистора в цепи задания регулятора 13 выпрямленного тока и секцию 35 резистора в цепи обратной связи по току возбуждения регулятора 9 тока возбуждения. При этом стенд работает в описанном нормальном режиме.
В ходе осуществления требуемых технологией испытаний режимов в зависимости от вида принятого математического описания ГТД и величины коэффициентов и постоянных времени дифуравнений этого описания, а также от величины задаваемых изменений углового положения ручки сектора газа αруд, темп и величина приращений частоты вращения на выходе ЭВМ 26 могут быть насколько большими, что выпрямленный ток I достигает значений, при которых фактическое значение угла β в соответствии с формулой (1) становится большим, чем заданное значение, определяемое блоком 17 управления инвертором и установленное на входе управления компаратора 22. При равенстве или превышении фактическим сигналом β заданного значения выходной сигнал компаратора 22 становится равным единичному значению, которое подается на управляющие входы ключей 23 и 24, последние закрываются и вводят соответственно секцию 28 резистора в цепи задания регулятора 13 выпрямленного тока и секцию 35 резистора в цепи обратной связи по току возбуждения регулятора 9 тока возбуждения. Дешунтирование секции 28 резистора в цепи задания регулятора 13 выпрямленного тока приведет к уменьшению коэффициента усиления регулятора 13 по этому каналу в соответствии с выражением
достигает значений, при которых фактическое значение угла β в соответствии с формулой (1) становится большим, чем заданное значение, определяемое блоком 17 управления инвертором и установленное на входе управления компаратора 22. При равенстве или превышении фактическим сигналом β заданного значения выходной сигнал компаратора 22 становится равным единичному значению, которое подается на управляющие входы ключей 23 и 24, последние закрываются и вводят соответственно секцию 28 резистора в цепи задания регулятора 13 выпрямленного тока и секцию 35 резистора в цепи обратной связи по току возбуждения регулятора 9 тока возбуждения. Дешунтирование секции 28 резистора в цепи задания регулятора 13 выпрямленного тока приведет к уменьшению коэффициента усиления регулятора 13 по этому каналу в соответствии с выражением
Kрт=  (3)
(3)
В результате уменьшается выпрямленный ток I , так как выходной сигнал регулятора 13 тока уменьшится.
, так как выходной сигнал регулятора 13 тока уменьшится.
Уменьшение выпрямленного тока повлечет в соответствии с выражением (1) уменьшение фактического значения угла β, а значит и удаление его из области значений, больших заданного, при которых возникает режим опрокидывания инвертора, вызывающий аварийное отключение стенда защитой. Сохранение работоспособности стенда в рассмотренных режимах повышает его надежность, что сокращает количество повторных и некондиционных испытаний.
Введение секции 35 резистора в цепи обратной связи по току возбуждения регулятора 9 приведет к уменьшению коэффициента усиления регулятора тока возбуждения по каналу обратной связи в соответствии с выражением
Kртв=  (4) Это приведет к увеличению тока возбуждения, так как заданное сигналом Uзтв значение тока возбуждения по прямому входу, образованному резистором 37, будет уравновешено на входе регулятора 9 сигналом по каналу обратной связи при большем, чем до дешунтирования значения тока возбуждения вследствие уменьшения коэффициента усиления регулятора 9 по этому каналу.
(4) Это приведет к увеличению тока возбуждения, так как заданное сигналом Uзтв значение тока возбуждения по прямому входу, образованному резистором 37, будет уравновешено на входе регулятора 9 сигналом по каналу обратной связи при большем, чем до дешунтирования значения тока возбуждения вследствие уменьшения коэффициента усиления регулятора 9 по этому каналу.
Благодаря этому момент и динамические свойства синхронной электрической машины 2 несмотря на уменьшение выпрямленного тока I не изменяются, что следует из известного выражения
не изменяются, что следует из известного выражения
M = K ˙ I ˙ Φ (5) где Φ - поток синхронной машины, определяемый током возбуждения;
˙ Φ (5) где Φ - поток синхронной машины, определяемый током возбуждения;
К - коэффициент пропорциональности, если подобрать соответствующим образом отношение резисторов по выражениям (3) и (4). При уменьшении темпа задаваемых ЭВМ 26 приращений частоты вращения выпрямленный ток I будет уменьшаться, фактическое значение угла β на выходе вычислителя 21 также будет уменьшаться, и когда оно станет меньше, чем заданное значение U
будет уменьшаться, фактическое значение угла β на выходе вычислителя 21 также будет уменьшаться, и когда оно станет меньше, чем заданное значение U , выходной сигнал компаратора 22 станет равным нулю, управляемые ключи 23 и 24 откроются, шунтируя тем самым в соответствующих цепях секции 28 и 35 резисторов. При этом выпрямленный ток I
, выходной сигнал компаратора 22 станет равным нулю, управляемые ключи 23 и 24 откроются, шунтируя тем самым в соответствующих цепях секции 28 и 35 резисторов. При этом выпрямленный ток I возрастет, а ток возбуждения уменьшится и стенд вернется в исходное состояние.
возрастет, а ток возбуждения уменьшится и стенд вернется в исходное состояние.
Таким образом, контроль фактического значения угла β и формировании команды на уменьшение выпрямленного тока I при соответствующем увеличении тока возбуждения при приближении фактического значения β к заданному позволяет избежать режимов опрокидывания инвертора и вызванных этим аварийных отключений стенда при высоких темпах изменения задаваемых ЭВМ в соответствии с параметрами дифуравнений принятого математического описания ГТД приращений частоты вращения, а также при больших изменениях углового положения ручки сектора газа αруд. Это повышаете надежность стенда, сокращает количество повторных и некондиционных испытаний топливорегулирующей аппаратуры. (56) Шевяков А. А. Теория автоматического управления силовыми установками летательных аппаратов. М. : Машиностроение, 1976, с. 344.
при соответствующем увеличении тока возбуждения при приближении фактического значения β к заданному позволяет избежать режимов опрокидывания инвертора и вызванных этим аварийных отключений стенда при высоких темпах изменения задаваемых ЭВМ в соответствии с параметрами дифуравнений принятого математического описания ГТД приращений частоты вращения, а также при больших изменениях углового положения ручки сектора газа αруд. Это повышаете надежность стенда, сокращает количество повторных и некондиционных испытаний топливорегулирующей аппаратуры. (56) Шевяков А. А. Теория автоматического управления силовыми установками летательных аппаратов. М. : Машиностроение, 1976, с. 344.
Сторожев Г. А. Примение вентильного электродвигателя в высокоскоростном электроприводе безмоторного испытательного стенда. Инструктивные указания по проектированию электротехнических промышленных установок. М. : Энергоатомиздат, 1986, N 1, с. 6.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления стендом для испытаний топливорегулирующей аппаратуры газотурбинных двигателей | 1989 |
|
SU1688143A1 |
| Вентильный электропривод | 1990 |
|
SU1697251A1 |
| Вентильный электропривод | 1987 |
|
SU1584056A1 |
| Вентильный электродвигатель | 1986 |
|
SU1379931A1 |
| Вентильный электродвигатель | 1985 |
|
SU1297184A1 |
| Вентильный электродвигатель | 1984 |
|
SU1259426A1 |
| Вентильный электродвигатель | 1985 |
|
SU1336187A1 |
| Вентильный электродвигатель | 1985 |
|
SU1275676A1 |
| Вентильный электродвигатель | 1985 |
|
SU1267578A1 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОСНАБЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1994 |
|
RU2090389C1 |
Использование: испытание газотурбинных двигателей. Сущность изобретения: стенд для испытаний топливорегулирующей аппаратуры содержит вычислитель 1 угла управления тиристорами инвертора β , компаратор 22, первый 19 и второй 20 датчики напряжения, первый 23 и второй 24 управляемые ключи, датчик расхода топлива и электронную вычислительную машину 26. Управляющие входы ключей 23 и 24 подключены к выходу компаратора 22, вход управления которого образует вход задания угла управления тиристорами инвертора, вход соединен с выходом вычислителя 21 угла управления тиристорами инвертора, первый вход которого подключен к выходу датчика 12 выпрямленного тока, второй вход - к выходу первого датчика 19 напряжения, подключенного к выходу управляемого выпрямителя 7, третий вход - к выходу второго датчика 20 напряжения, подключенного к двум фазам синхронной машины 2, а четвертый вход соединен с выходом тахогенератора 4. Это позволяет обеспечить контроль фактического значения угла управления тиристорами инвертора b , сравнение его с заданным значением, определяемым коммутационной устойчивостью инвертора, и формирование команды на уменьшение выпрямленного тока с одновременным увеличением тока возбуждения при условии равенства заданного и фактического значений b . В результате этого фактическое значение угла b уменьшается и уходит из области значений, где возможно опрокидывание инвертора при высоких темпах, задаваемых математической моделью двигателя приращений частоты вращения, чем предотвращается аварийное отключение стенда и обеспечивается повышение его надежности. 2 ил.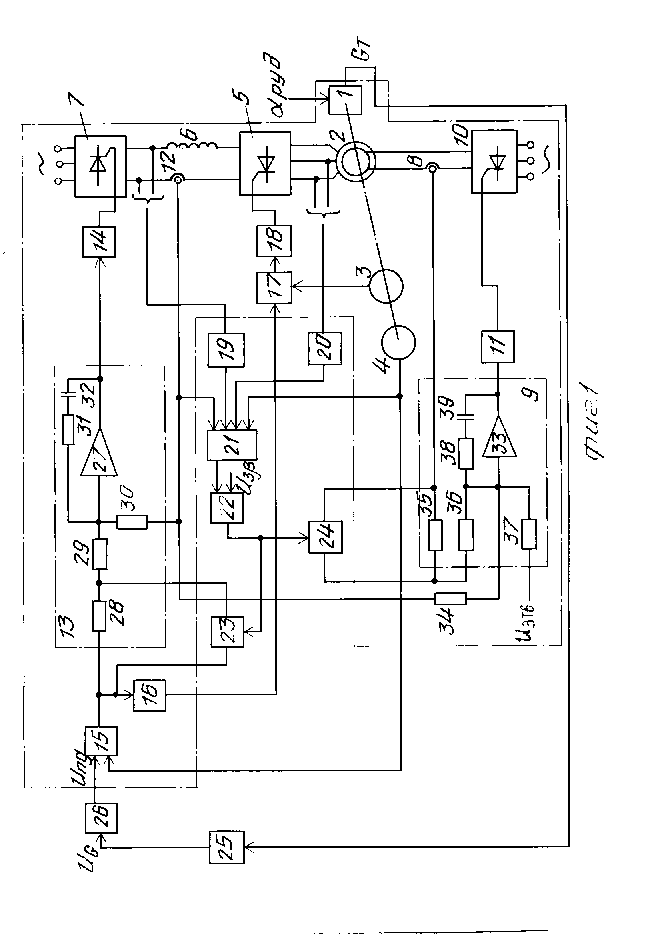
СТЕНД ДЛЯ ИСПЫТАНИЙ ТОПЛИВНО-РЕГУЛИРУЮЩЕЙ АППАРАТУРЫ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ, содержащий связанную с испытуемым агрегатом синхронную электрическую машину, датчик положения ротора и тахогенератор, связанные с валом синхронной электрической машины, секции обмотки якоря которой подключены через инвертор и сглаживающий дроссель к выходу выпрямителя, а обмотка возбуждения - к системе регулирования тока возбуждения, выполненной в виде датчика тока возбуждения, соединенного с первым входом регулятора тока возбуждения, и тиристорного возбудителя, соединенного через систему импульсно-фазового управления с выходом регулятора тока возбуждения, второй вход которого соединен с датчиком выпрямленного тока и первым входом регулятора выпрямленного тока, выход которого через систему импульсно-фазового управления выпрямителя соединен с управляющим входом выпрямителя, связанный с тахогенератором регулятор частоты вращения ротора, выход которого соединен с вторым входом регулятора выпрямленного тока и через релейный элемент - с первым входом блока управления инвертором, второй вход которого связан с датчиком положения ротора, а выход - с системой импульсно-фазового управления инвертором, выходы которой соединены с управляющими входами инвертора, отличающийся тем, что, с целью повышения надежности, он содержит два датчика напряжения, вычислитель угла управления тиристорами инвертора, компаратор, два управляемых ключа, датчик расхода топлива и электронную вычислительную машину, причем, датчик расхода топлива соединен через электронную вычислительную машину с вторым входом регулятора частоты вращения ротора, первый вход вычислителя угла управления тиристорами инвертора соединен с датчиком выпрямленного тока, второй вход - с выходом первого датчика напряжения, подключенного к выходу управляемого выпрямителя, третий вход - с выходом второго датчика напряжения, подключенного к двум фазам синхронной электрической машины, четвертый вход - с выходом тахогенератора, а выход - с входом компаратора, выход которого соединен с входом первого управляемого ключа, выходы которого соединены с вторым и третьим входами регулятора выпрямленного тока и входом второго управляемого ключа, выходы которого соединены с первым и третьим входами регулятора тока возбуждения.
