(54) ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель | 1982 |
|
SU1065979A1 |
| Управляемый вентильный электродвигатель | 1987 |
|
SU1458961A1 |
| Вентильный электродвигатель | 1985 |
|
SU1387124A1 |
| Управляемый вентильный электродвигатель | 1988 |
|
SU1577002A2 |
| Вентильный электродвигатель | 1987 |
|
SU1427508A2 |
| Вентильный электродвигатель | 1989 |
|
SU1676019A2 |
| Вентильный электродвигатель | 1984 |
|
SU1197019A2 |
| Вентильный электродвигатель | 1983 |
|
SU1119130A2 |
| Устройство для регулирования облучения | 1988 |
|
SU1612275A1 |
| Вентильный электродвигатель | 1984 |
|
SU1201970A1 |
1
Изобретение относится к области электротехники, в частности к вентильным электродвигателям (БД). Кроме того, данное изобретение может быть использовано в устройствах перемотки магнитной ленты в магнитофонах.
Известен ВД, в котором реализована механическая характеристика, близкая к линии равной механической мощности, за счет аппроксимации ее участками характеристик статической стабилизации частоты вращения вала двигателя и ограничения потребляемого двигателем тока 1.
Недостатком такого электродвигателя является снижение КПД при увеличении диапазона частот, вращения, соответствующих малой жесткости механической характеристики, так как с увеличением глубины регулирования частоты вращения КПД двигателя падает.
Для двигателей, предназначенных для работы в электроприводе мотор-колесо, необходимо осуществлять режимы рекуперации энергии в сеть либо динамического торможения. Эти режимы могут быть реализованы при использовании коммутаторов,
силовая часть которых выполнена по мостовой схеме с обратными диодами.
Известен также ВД, который по технической сущности и технико-экономическому эффекту является наиболее близким к предложенному устройству. ВД содержит статор с расположенной на нем многофазной обмоткой, каждая фаза которой включена в одну из диагоналей моста, каждое плечо которого образовано параллельно соединенными транзистором и диодом, а другая диагональ моста подключена к источнику питания, и датчик положения ротора, соответствующие входы которого подключены к управляющим входам транзисторов плеч мос. та 2. ВД имеет линейную механическую характеристику, отличную от линии равной t5 механической мощности, что является его недостатком.
Целью изобретения является повыщение коэффициента полезного действия двигателя в щироком диапазоне изменения частоты вращения вала двигателя.
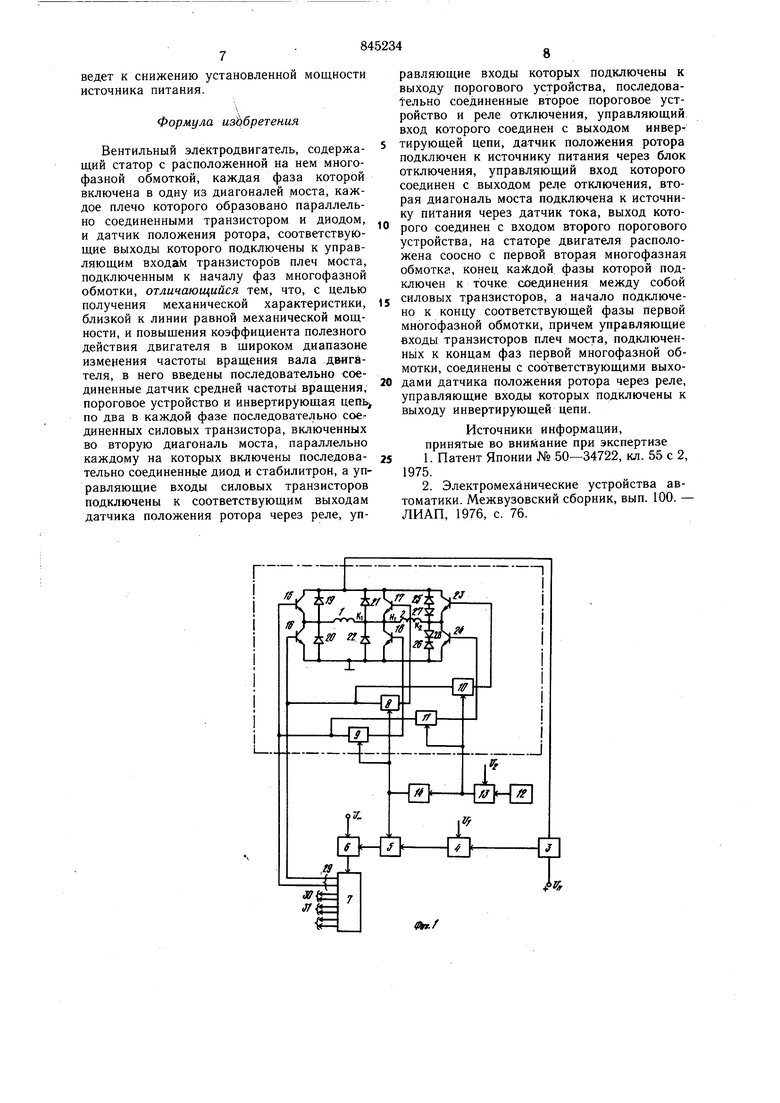
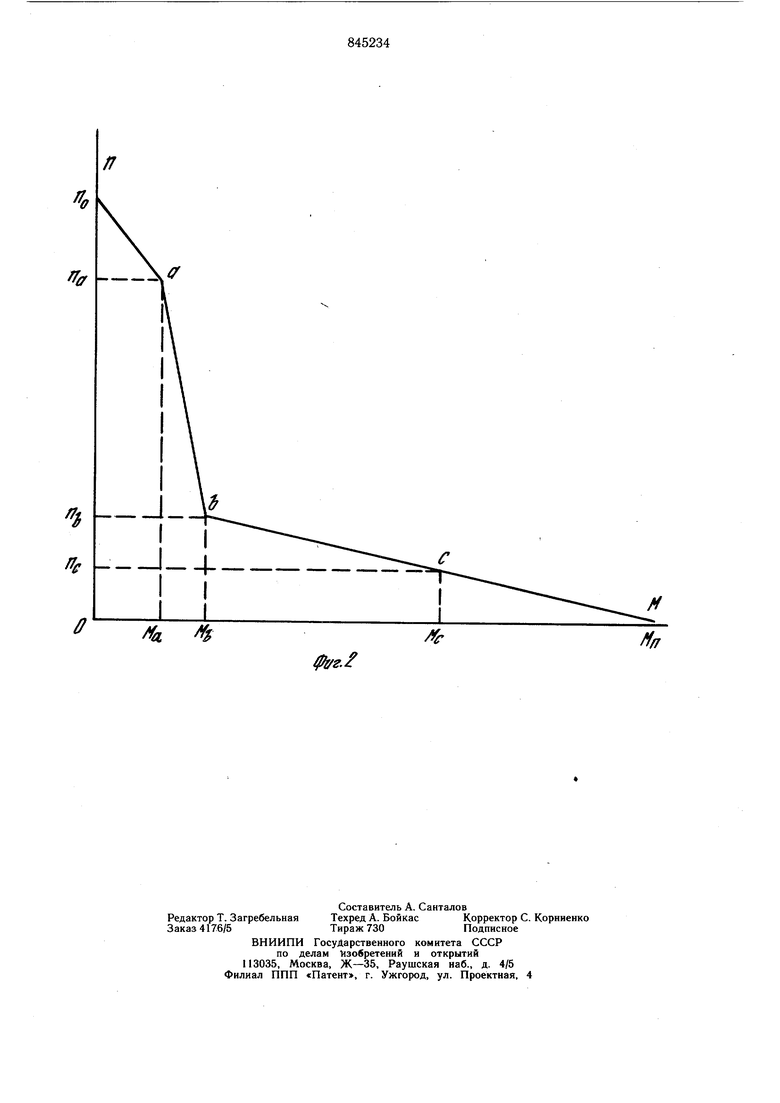
Для достижения этого в известный бесконтактный электродвигатель постоянного тока, содержащий ст-атор с расположенной на нем многофазной обмоткой, каждая фаза которой включена в одну из диагоналей моста, каждое плечо которого образовано параллельно соединенными транзистором и диодом, и датчик положения ротора, соответствующие выходы которого подключены к управляющим входам транзисторов плеч моста, подключенным к началам фаз многофазной обмотки, введены последовательно соединенные датчики средней частоты вращения, пороговое устройство и инвертирующая цепь, по два в каждой фазе последовательно соединенных силовых транзистора, включённых во вторую диагональ моста, параллельно каждому из которых включены последовательно соединенные диод и стабилитрон, а управляющие входы силовых транзисторов подключены к соответствующим выходам датчика положения ротора через реле, управляющие входы которых подключены к выходу порогового устройства, последовательно соединенные второе пороговое устройство и реле отключения, управляющий вход которого соединен с выходом инвертирующей цепи, датчик положения ротора подключен к источнику питания через блок отключения, управляющий вход которого соединен с выходом реле отключения, вторая диагональ моста подключена к источнику питания через датчик тока, выход которого соединен с входом второго пороговего устройства, на статоре двигателя расположена соосно первой вторая многофазная обмотка, конец каждой фазы которой подключен к точке соединения между собой силовых транзисторов, а начало подключено к концу соответствующей фазы первой многофазной обмотки, причем управляющие входы транзисторов плеч моста, подключенньГх к концам фаз первой многофазной обмотки, соединены с соответствующими выходами датчика положения ротора через реле, управляющие входы которых подключены к выходу инвертирующей цепи. На фиг. 1 представлена функциональная схема устройства; на фиг. 2 - его механическая характеристика. На фиг. 1:1 - фаза первой многофазной обмотки; 2 - фаза второй многофазной обмотки; 3 - датчик тока; 4 - второе пороговое устройство; 5 - реле отключения; 6 - блок отключения; 7 - датчик положения ротора; 8, 9, 10, 11 - реле; 12 - датчик средней частоты вращения; 13 - пороговое устройство; 14 - инвертирующая цепь; 15, 16, 17, 18 - транзисторы плеч моста; 19, 20, 21, 22 - диоды плеч моста; 23, 24 - силовые транзисторы; 25, 26 - диоды; 27, 28 - стабилитроны. Датчик 7 положения ротора имеет выходы 29-31, число которых равно числу фаз обмотки якоря. На фиг. 1 статор двигателя не показан. Кроме того, представлена лищь одна фаза двигателя, так как; другие фазы идентичны данной. Элементы, относящиеся к данной фазе, ограничены щтрих-пунктирной линией. На фиг. 2: п - частота вращения; М - момент нагрузки на валу; , Mg MC.- величины момента нагрузки в соответствующих точках механической характеристики, близкой к линии равной мощности; Пд, ng, Пе-частота вращения вала двигателя в соответствующих точках механической характеристики; Мп - пусковой момент; По - частота холостого хода; УН-напряжение источника питания. Фаза многофазной обмотки 1 включена в одну из диагоналей моста, каждое плечо которого образовано одним из транзисторов 15-18 и соответственно одним из диодов 19-22, включенными параллельно. В другую диагональ моста включены последовательно соединенные силовые транзисторы 23 и 24, параллельно каждому из которых включены последовательно соединенные диод и стабилитрон. На статоре двигателя соосно с первой обмоткой 1 расположена вторая многофазная обмотка 2, начало HI каждой фазы которой подключено к концу Kj соответствующей фазы первой многофазной обмотки 1, а конец К г фазы второй многофазной обмотки 2 подключен к точке соединения между собой силовых транзисторов 23 и 24. Вторая диагональ моста каждой фазы подключена к источнику питания через датчик тока 3, выход которого подключен через последовательно соединенные второе пороговое устройство 4 и реле отключения 5 к управляющему входу блока отключения 6, включенного в цепь питания датчика 7 положения ротора. Выход 29 (для первой фазы; см. фиг. 1) датчики 7 положения ротора подключен к управляющим входам транзисторов 15 и 16. Управляющие входы транзисторов 17, 18, 23, 24 через реле 8, 9, 10, 11 подключены к выходу 29 датчика 7 положения ротора. Выход датчика 12 средней частоты вращения через последовательно соединенные пороговое устройство 13 и инвертирующую цеПь 14 подключен к управляющим входам реле 8, 9 и реле откл|6чения 5. Выход порогового устройства 13 подключен также к управляющим входам реле 10 и 11. Другие выходы датчика 7 положения ротора подключаются к соответствующим управляющим входам транзисторов в других фазах, выполненных идентично фазе, представленной на фиг. 1, где пунктиром выделены элементы, относящиеся к одной фазе. Элементы 3, 4, 5, 6, 7, 12, 13, 14 являются общими для всех фаз. Работает устройство следующим обраПороговое устройство 4 установкой напряжения Ui настраивается на величину тока в двигателе при моменте нагрузки на валу Ма- Пороговое устройство 13 установ напряжения U настраивается на величину сигнала с датчика 12 средней частоты вращения, соответствующего частоте вращения ng. Величина напряжения U| и U выбирается таким образом, чтобы выполнялось условие M.fng const. Исходное состояние элементов схемы при пуске двигателя: реле 5, 8, 9 нормально разомкнуты, реле 10, 11 нормально замкнуты. При подаче напряжения питания двигатель начинает разгоняться по естественной механи ческой характеристике на участке (фиг. 2), крутизна которой определяется параметрами включенных последовательно обмоток 1 и 2. При этом коммутацию тока в обмотках по сигналам с датчика 7 положения ротора осуществляют транзисторами 15, 16, 23, 24. При достижении частоты вращения ng по сигналу с датчика 12 средней частоты вращения вала срабатывает пороговое устройство 13, в результате чего контакты реле 10 и 11 размь1каются, а контакты реле 8, 9 и 5 замыкаются. При этом вторая многофазная обмотка 2 отключается от источника питания, так как управляющие входы транзисторов 23, 24 контактами реле 10 и 11 отключены от выхода 29 датчика положения ротора 7, и вступают в работу транзисторы 17 и 18, управляющие входы которых через реле 8 и 9 подключаются к выходу 29 датчика положения ротора 7. Теперь работает лишь многофазная обмотка 1. Так как контакты реле 5 замкнуты и частота вращения двигателя в данный момент равна ng, то ток в обмотке 1 стремится возрасти, что приводит к возрастанию сигнала с датчика тока 3, срабатыванию порогового устройства 4 и блока отключения 6, в результате чего происходит отключение датчика- 7 положения ротора от источника питания. Это приводит к запиранию транзисторов 15, 16, 17 и 18 и отключению обмотки 1 от источника питания. При этом ток в обмотке 1 начинает уменьшаться. При уменыиении тока сигнал с датчика тока 3 уменьшается, пороговое устройство 4 переходит в исходное состояние, контакты блока отключения 6 замыкаются и датчик 7 положения ротора вновь подключается к цепи питания, а обмотка I также оказывается подключенной к источнику питания. Таким образом, ток в обмотке 1 не может возрасти выше уровня, определяемого настройкой второго порогового устройства 4, а двигатель работает на участке 6-а механической характеристики. При достижении частоты вращения г второе пороговое устройство 4 перестает срабатывать по сигналу с датчика тока 3 и двигатель далее работает на участке а-п (фиг. 2) механической характеристики, крутизна которой определяется параметрами обмотки 1. При увеличении нагрузки на валу устройство работает в обратной, последовательности. При работе устройства на частотах вращения, больших ng, в неработаюц ей обмотке 2 возникает ЭДС вращения, которая в случае отсутствия стабилитронов 27 и 28 могла бы замыкаться через диоды 25 и 26 и транзисторы 17 и 18, вызывая появление тока в обмотке 2, что привело бы к созданию в двигателе тормозного момента и, следовательно, к снижению мощности на валу и КПД. Диоды вместо стабилитронов 27 и 28 ставить нельзя, так как при работе двигателя на участке Mg механической характеристики, когда ток в обмотках коммутируется транзисторами 15, 16, 23, 24, ЭДС самоиндукции, возникаемая в обмотке 2 при коммутации тока в ней, достигла бы недопустимо больших значений, что могло бы привести к выходу из строя транзисторов 23 и 24. Выбирая соотношение чисел витков первой и второй многофазных обмоток 1 и 2, можно получить принципиально любое отношение частот вращения %/ng, т.е. получить практически любой диапазон изменения частоты вращения, соответствующий участку «мягкой механической характеристики. Выбором активного сопротивления обмоток 1 и 2 можно обеспечить такую жесткость механической характеристики на участке М (. 2), чтобы в заданном диапазоне изменения моментов нагрузки (например в диапазоне момента Мд...Мд) выполнялось условие ng МрЦр. const, что определяет принадлежность точек а,в,с к линии равной механической мощности. Таким образом, аппроксимация линии равной механической мощности осуществляется по трем точкам, а двигатель обладает механической характеристикой, близкой к линии равной механической мощности в широком диапазоне изменения частоты вращения вала. Высокие энергетические показатели предложенного бесконтактного двигателя постоянного тока обусловлены тем, что на участках По-а, Ъ-М(фиг. 2) двигатель работает на естественных механических характеристиках, где КПД всегда выше, чем при любом способе регулирования. При этом двигатель рассчитывается так, чтобы точка а, в (фиг. 2) были близки к точкам максимума КПД на естественных механических характеристиках. Испытания макетного образца показали работоспособность предложенного устройства и высокий КПД бесконтактного двйгателя постоянного тока в широком диапазоне частот вращения (1:6), в котором механическая характеристика двигателя близка к линии равной механической мощности. Применение мостовой схемы усилителя с обратными диодами позволяет использовать ВД в электроприводах мотор-колесо практически любой мощности. Замена сериесных коллекторных двигателей на бесконтактные приведет к улучшению энергетических характеристик электроприводов и к увеличению срока их службы. Кроме того, реализация механической характеристики, близкой к линии равной механической мощности, приведет к снижению установленной мощности источника питания. Формула изобретения Вентильный электродвигатель, содержащий статор с расположенной на нем многофазной обмоткой, каждая фаза которой включена в одну из диагоналей моста, каждое плечо которого образовано параллельно соединенными транзистором и диодом, и датчик положения ротора, соответствующие выходы которого подключены к управляющим входам транзисторов плеч моста, подключенным к началу фаз многофазной обмотки, отличающийся тем, что, с целью получения механической характеристики, близкой к линии равной механической мощности, и повыщения коэффициента полезного действия двигателя в щироком диапазоне изменения частоты вращения вала двигателя, в него введены последовательно сое теля, в него введены писледиьс.1с..опи диненные датчик средней частоты вращения, пороговое устройство и инвертирующая цепь, по два в каждой фазе последовательно сое диненных силовых транзистора, включенных во вторую диагональ моста, параллельно каждому на которых включены последовательно соединенные диод и стабилитрон, а управляющие входы силовых транзисторов подключены к соответствующим выходам датчика положения ротора через реле, уп iff ч
±hD равляющие входы которых подключены к выходу порогового устройства, последоваельно соединенные второе пороговое устройство и реле отключения, управляющий вход которого соединен с выходом инвертирующей цепи, датчик положения ротора подключен к источнику питания через блок отключения, управляющий вход которого соединен с выходом реле отключения, вторая диагональ моста подключена к источнику питания через датчик тока, выход которого соединен с входом второго порогового устройства, на статоре двигателя расположена соосно с первой вторая многофазная обмотка, конец каАдой фазы которой подключен к точке соединения между собой силовых транзисторов, а начало подключе но к концу соответствующей фазы первой многофазной обмотки, причем управляющие входы транзисторов плеч моста, подключенных к концам фаз первой многофазной обмотки, соединены с соответствующими выходатчика положения ротора через реле, управляющие входы которых подключены к У .. f выходу инвертирующей цепи. Источники информации, принятые во внимание при экспертизе 1.Патент Японии № 50-34722, кл. 55 с 2, 2.Электромеханические устройства автоматики. Межвузовский сборник, вып. 100. - ЛИАП, 1976, с. 76.
г.
