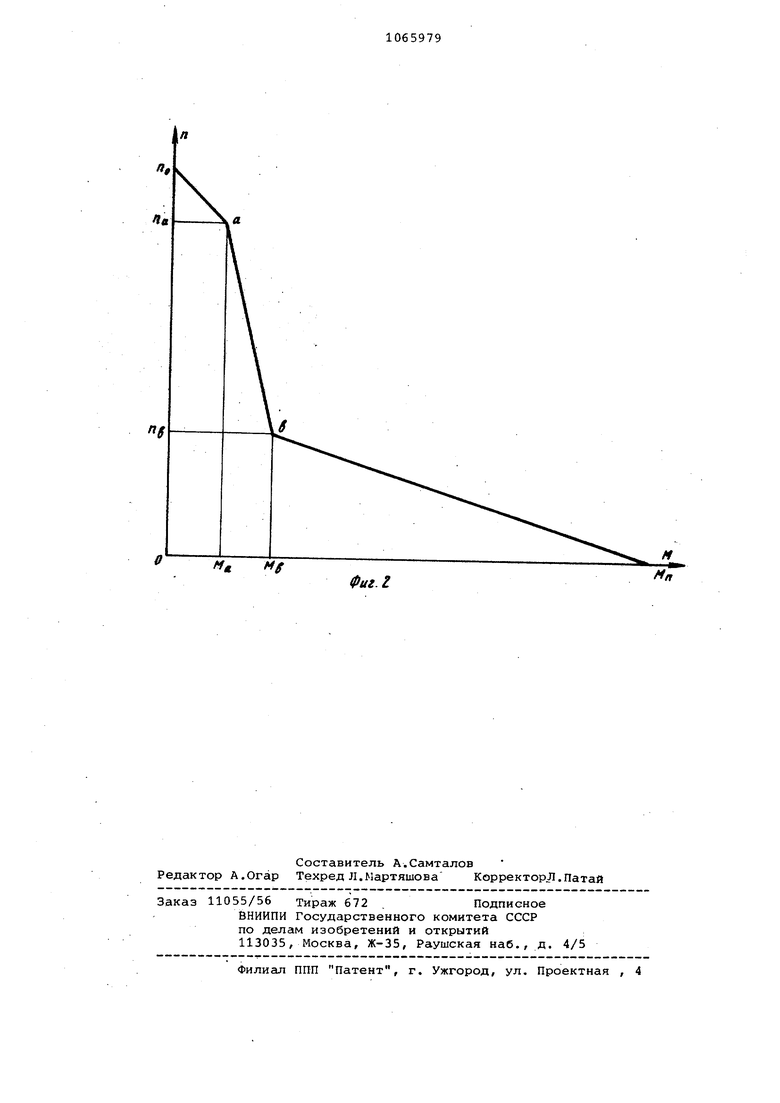
Изобретение относится к электротехнике, в частности к двигателям постоянного тока с бесконтактной коммутацией, осуществляемой с помощ полупроводниковых приборов, - вентильным двигателям (ГВД)) Известен ВД, в котором реализова на механическая характеристика, подобная механической характеристике сериесного коллекторного двигателя постоянного тока, в заданном днапазоне частот вращения. ВД содержит четырехсекционную обмотку, уложенную на статоре двигателя, секции которой могут быть подключены к источнику питания как параллельно, так и последовательно В диапазоне частот вращения вала, в котором происходит переключение секций обмотки двигателя с параллельного соединения на последовательное и обратно, механическая характеристика ВД подобна механи ческой характеристике коллекторного двигателя постоянного тока с последовательныг возбуждением 13Недостатками указанного ЗД являются низкий диапазон .изменения частоты вращения, в котором реализована механическая характеристика данного вида, и отсутствие режима генераторного торможения в данном диапазоне изменения частоты вращения. Известно также устройство, которое позволяет реализовать механическую характеристику бесконтактгного двигателя постоянного тока, близкую к линии равной механической мощности, за счет аппроксимации ее V Eacткaми характеристик статической стабилизации частоты вращения вала двигателя и ограничения потребляемого -двигателем Тока 23, Недостатки данного ;стройства обусловлены невозможностью реализации режима генераторного торможения а также снижением КПД двигателя при увеличении диапазона частот вращени соответствующих малой жесткости механической характеристики, так как с увеличением глубины регулирования частоты вращения КПД двигателя падает. . Для электродвигателей, предназна ченных для работы в электроприводе MOTOp-KOJ.ecOi, наряду с реализацией механической характеристики, близкой к линии равной мощности,.необходимо осуществлять режим гене:раторного .торможения,-что важно, в частности, при работе ВД от автономного источника питания, например, аккумуляторной батареи,- для е подзарядки. Наиболее близким к предлагаемому по технической сущности и достигаемому результату.ВД содержит статор с расположенной на нем многофазной обмоткой, каждая фаза которой включена в диагональ моста, каждое плечо которого образовано параллельно соединенными транзистором и диодом, последовательно соединенные датчик средней частоты вращения, пороговое устройство и инвертирующую цепь, датчик положения ротора, выходы которого подключены к управ,ляющим входам транзисторов плеч, .подключенных к концам фаз многофазной обмотки, а входы транзисторов плеч, подключенных к концам фаз многофазной обмотки,подключены к выходам датчика положения ротора через реле, управляющие которых подключены к выходу порогового устройства, последовательно соединенные второе пороговое устройство и реле отключения, управляющий вход которого соединен с выходом инвертирующей цепи, датчик положенияротора подключен к источнику питания через блок отключения, управляющий вход которого соединен с выходом реле отключения, вторая диагональ моста подклю чена к источнику питания через датчик тока, выход которого соединен с входом второго порогового устройства, на статоре двигателя расположена соосно с первой вторая многофазная обмотка, конец каждой из которой подключен к точке соедине- ния между собой последовательно соединеннах силовых транзисторов, включенных во вторую диагональ моста, а начало подключено к концу соответствующей фазы первой многофазной обмотки, причем входы силовых транзисторов соединены с соответствующими выходами датчика положения ротора через реле, управляющие входы которых пoдключeнLl к выходу порогового устройства, В ВД благодаря наличию второй многофазной обмотки реализована механическая характеристика, близкая к линии равной механической мощности З . Однако в диапазоне частот вращения от нуля до частоты холостого хода известный ВД не имеет возможности осуществлять .режим генераторного торможения,, поскольку амплитуда ЭДС вращения, наводимой в фазах многофазных обмоток ВД, во всем диапазоне частот вращения не превышает напряжения источника питания. Кроме того, при работе ВД на низких частотcix вращения, когда к источнику питания подключены последовательно соединенные фазы первой и второй многофазных обмоток, в моменты ком1 1утации силовых транзи-сторов происходит скачкообразное изменение тока в фазах первой многофазной обмотки. Это, в свою очередь, приводит к снижению КПД ВД в результате ухудшения гармонического состава кривой фазного тока. Скачки тока обусловле ны невозможностью замыкания реактив ной составляющей тока в течение меж коммутационного интервала через последовательно соединенные диод и стабилитрон, которые включены парал лельно силовым транзисторам. Отсутствие режима генераторного торможения в ВД приводит к сужению области его использования и ограничению функциональных возможностей. Цель изобретения - расширение функциональных возможностей вентиль ного электродвигателя путем обеспечения режима генераторного торможения в заданном диапазоне частот вра щения и повышение его КПД. Поставленная цель достигается тем, что в вентильный электродвигатель , содержащий статор с расположе ной на нем многофазной обмоткой, каждая фаза которой включена в диагональ моста, каждое плечо которого образовано параллельно соединенными транзистором и диодом, последовательно соединенные датчик средней частоты вращения, пороговое устройство и инвертирующую цепь, датчик положения ротора, выходы которого подключены к управляющим входам транзисторов плеч, подключенных к началу фаз многофазной обмотки, а входы транзисторов плеч, подключенных к концам фаз многофазной обмотки, подключены к выходам датчика положения ротора через реле, управляющие входы которых подключены к выходу порогового устройства, пос довательно соединенные второго, пороговое устройство и реле отключения, управляющий вход которого соединен с выходом инвертирующей цепи, датчик положения ротора подключен к источнику питания через бл отключения, управляющий вход которого соединен с выходом реле отключения, вторая диагональ моста подключена к источнику питания через датчик тока, выход которого соединен с входом второго порогового уст ройства, на статоре двигателя распо ложена соосно с первой вторая многофазная обмотка, конец каждой фазы которой подключен к точке соединения между собой последовательно соединенных силовых транзисторов, включенных во вторую диагональ мост а начало подключено к концу соответствующей фазы первой многофазной обмотки, причем входы силовых транзисторов соединены с соответствующи ми выходами датчика положения ротор через реле, управляющие входы которых подключены к выходу порогового устройства, введены параллельно каж дому из силовр х транзисторов, соединенных с концами второй обмотки, реле обратного тока, управпяющие входы которых подключены к выходу порогового устройства. Кроме того, в вентильный электродвигатель могут быть введены последовательно соединенные логический элемент ИЛИ, вторая инвертирующая цепь и коммутирующее реле, выход которого подключен к управляющим входам реле обратного тока, управляющий вход коммутирующего реле подключен к выходу инвертирующей цепи, а входы логического элемента ИЛИ подключены к выходам датчика положения ротора. На фиг. 1 приведена функциональная .схема вентильного электродвигателя; на фиг. 2 - механическая характеристика, На схеме его обозначены фаза первой многофазной обмотки 1, транзисторы 2-5 плеч моста, диоды плеч моста 6-9, силовые транзисторы 10 и 11, реле 12 и 13 обратного тока, фаза второй многофазной обмотки 14, датчик 15 тока, второе пороговое устройство 16, реле 17 откл.зчения, блок 18 отключения, датчик 19 положения ротора, выход 20 датчика положения ротора, реле 21-24, датчик 25 средней частоты вращения, пороговое устройство 26, инвертирующая цепь 17, коммутирующее реле 28, логический элемент ИЛИ 29, входы 30-33 логического элемента ИЛИ, входы 34-36 датчика положения ротора и вторая инвертирующая цепь 37. На фиг. 1 статор двигателя не показан. Кроме того, представлена лишь одна фаза двигателя, так как другие фазы индентичны данной. Элементы, относящиеся к данной фазе, ограничены штрих-пунктирной линией. Датчик 19 положения ротора имеет выходы 20, 34, 35, 36..., число которых равно числу фаз обмотки якоря. Число входов логического элемента ИЛИ 29 равно числу выходом датчика 19 положения ротора. Нафиг.2п обозначает частотувраще ,нич,М - момент нагрузки на валу,Mot, rfjj - величины момента в соответствующих точках механической характеристики, (1, частоты вращения вала двигателя в соответствующих точках механической характеристики, Mf, - пусковой момент, п - частоту холостого- хода. Фаза, многофазной обмотки 1 вклю-чена в одну из диагоналей и моста, каждое плечо которого образовано параллельно включенными транзисторами 2-5 и диодами 6-9. В другую диагонсшь моста включены последовательно соединенные силовые транзисторы 10 и 11, параллельно каждому из
которых включены реле 12 и 13 обратного тока. На статоре двигателя соосно с первой обмоткой 1 расположена вторая многофазная обмотка 14, начало каждой фазы которой подключена К сонцу соответствующей фазы первой многофазной обмотки 1, а конец - к точке соединения между собо силовых транзисторов 10 и 11, Втора диагональ моста каждой фазы подключена к источнику питания через датчик 15 тока, выход которого подключен через последовательно соединенные второе пороговое устройство 16 и реле 17 отключения к управляющему Jвxoдy блока 18 отключения, включенного в цепь питания датчик 19 поло жения ротора. Выход 20 (для первой фазы фиг.1 I датчика 19 положения ротора подключен к управляющим входам транзисторов 2 и 3. Управляющие входы транзисторов 4, 5, 10 и 11 через реле 21-24 подключены к вьлход 20 датчика 19 положения ротора. Выход датчика 25 средней частоты вращения через последовательно соед ненные пороговое устройство 26 и инвертирующую цепь 27 подключен к управляющим входам реле 21 и 22, реле 17 отключения и коммутирующего реле 28. порогового устрой. ства 26 подключен к управляющим входам реле 23 и 24 и реле 12 и 13 обратного тока. Виход 20 датчика 19 положения ротора подключен к входу логического элемента ИЛИ 29. К остальным входам 31-33 логического элемента ИЛИ 29 подключены соответствующие иыходы 34-36 датчика 19 положения ротора. Выход логического, элемента ИЛИ 29 подтключен к входу второй инвертирующей цепи 37, выход которой через коммутирующее реле 26 подключен к управляющим входам реле 12 и 13 обратного тока. Элементы 15-19, 25-28, 30 и 37 являются общими для всех фаз,
Устройство работает следующим образом.
Пороговое устройство 16 установкой напряжения и, настраивается на величину тока в двигателе при моменте нагрузки на валу М. Пороговое устройство 26 установкой напряжения U2 настраивается на величину сигнала с датчика 25 средней частоты вращения соответствующего частоте вращения п. Величины напряжений U и (2 выбирают такими, чтобы выполнялось условие Wg , п, const ,
В исходном состоянии реле 17, 21 22 и 28 нормально разомкнуты, реле 2,1 и 24, а также реле обратного тока 12 и 13 нормально замкнуты.
При подаче напряжения питания двгатель начинает разгоняться по естественной механической характеристике
на участке (il)iir-.2b крутизна которой определяется параметрами включенных пocлeдoвaтeJтьнo o6MOT:,-j 1 и 14. При этом коммутацию тока в обмотках по сигналам с датчика 19 положения ротора осуществляют транзисторы 2, 3, 10 и 11. При достижении частотой вращения величины П по сигналу с датчика 25 средней частоты вращения вала срабатывает пороговое устройство 26, в результате чего контакты реле 17, 21, 22 и 28 замыкаются, а контакты реле 23 и 24 и реле 12 и 13 обратного тока размыкаются. При этом вторая многофазная обмотка 14 отключается от источника питания, так как управляющие входы транзисторов 10 и 11 контактами реле 23 и 24 отключены от выхода 20 датчика 19 положения ротора. При этом работает лишь многофазная обмотка 1. Так как контакты реле 17 замкнуты и частота вращения двигателя в данный момент равна п, то ток в обмотке 1 стремится возрасти, что приводит к возрастанию сигнала с датчика 15 тока, срабатыванию порогового устройства 16 и блока 18 отключения, в результате чего происходит отключение датчика 19 положения ротора и от источника питания. Это, в свою очередь, приводит к запиранию транзисторов 2-5 и отключению обмотки 1 от источника питания. Ток в обмотке 1 начинает уменьшаться. При уменьшении тока сигнал с датчика 15 тока уменьшается, пороговое устройство 16 переходит в исходное состояние, контакты блок 18 отключения замыкаются и датчик 19 положения ротора вновь подключается к цепи питания. Обмотка 1 также оказывается подключенной к источнику питания. Таким образом, ток в обмотке 1 не может возрасти выше уровня, определяемого настройкой второго порогового устройства 16 а двигатель работает на участке механической характеристики. При достижении частотой вращения величины Г1 второе пороговое устройство 16 перестает срабатывать по сигналу с датчика 15 тока и двигатель далее работает на участке ап (Фиг.2) механической характеристики, крутизна которой определяется параметрами обмотки 1. При увеличении нагрузки на валу работа устройства происходит в обратной последовательности. На участке Ъапд механической характеристики к источнику питания через транзисторы 2-5 подключается обмотка 1 , в которой наводится ЭДС вращения, не превышающая напряжение источника питания. Приэтом суммарная ЭДС наводимая в обмотках 1 и 14, на участке bah превышает напряжение источника питания, но не возможности замкнуться, так как транзисторы 10 и 11 и реле 12 и 13 обратного тока закрыты. При исчезновении сигналов с датчика 19 положения ротора, что имеет место или при отключении датчика положения ротора 19, или при регулировании частоты вращения, на выходе логического элемента ИЛИ 29 пропадает сигнал, что приводит к появлению сигнала на выходе второй инвертирующей цепи 37, который через замкнутые контакты коммутирующего реле 28 поступает на управляющие входы реле 12 и 13 обратного тока. В результате замыкания контактов реле 12 и 13 обратного тока появляется возможность ЭДС вращения, наводимой в последовательно соединенных обмотках 1 и 14, замыкаться через диоды 6 и 7 и реле 12 и 13 обратного тока на источник питания, осуществляя режим рекуперации энергии в сеть или режим генераторного торможения. При работе ВД на участке М механической характеристики реле 12 и 13 обратного тока находятся в замкнутом состоянии независимо от способа управления электродвигателем и- выполняют роль обратных диодов . в мостовой схеме. Поэтому в моменты коммутации транзисторов 2, 11 и 3, 10 реактивный ток, протекающий по обмоткам 1 Л 14, имеет воз|можность замыкаться на источник питания через диод 7 и реле 12 обратного тока или через диод 6 и реле 13
обратного тока. При этом скачков тока в многофазной обмотки 1, таких как в вентильном электродвигателе (31 нет, гармонический состав тока поэтому лучше, а КПД выше. В, качестве реле 12 и 13 обратного тока могут бить использованы любые управляемые элементы, обладающие односторонней проводимостью: трангзистор ii диод, включенные последовательно,
Стабилитрон и т.п.Коммутирующее релеп может быть выполнено в виде транзистора, коллектор которого, например, подключен к выходу второй инвертирующей цепи 37, эмиттер - к управляющим входам реле 12 и 13 обратного тока, а база - к выходу инверти-. рующей цепи 27.
Реализация режима генераторного торможения позволяет расширить область использования и функциональные возможности ВД в электроприводах, где ощущается дефицит электрической энергии, так как в этом режиме возможен возврат части энергии в источник - аккумуляторную батарею. Благодаря введению реле 12 и 13 обратного тока в предлагаемой ВД по сравнению с прототипом исключены скачки тока в обмотках двигателя в моменты коммутации транзисторов 2, 3, 10 и 11, что приводит к снижению потерь в меди от высших гармоник тока и повыгчению КПД электродвигателя.
JiL.
i9
фиг,1
15
fS
V
Фиг.1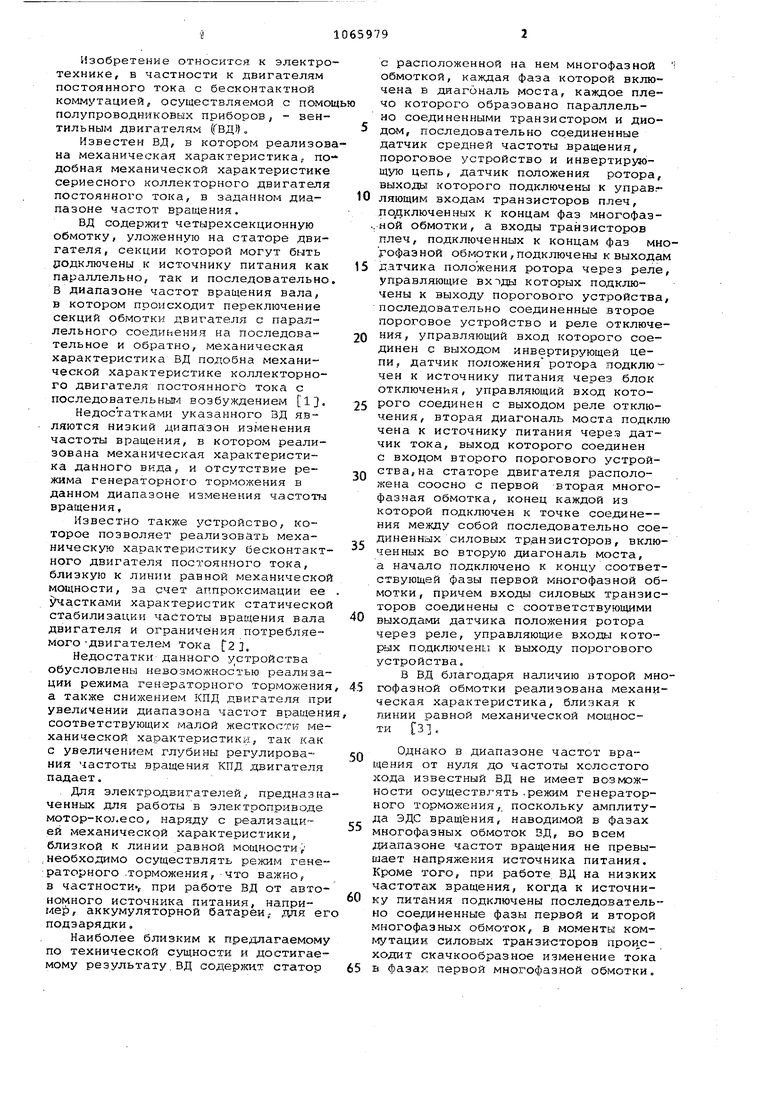

| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель | 1979 |
|
SU845234A1 |
| Вентильный электродвигатель | 1985 |
|
SU1387124A1 |
| Вентильный электродвигатель | 1987 |
|
SU1427508A2 |
| Управляемый вентильный электродвигатель | 1988 |
|
SU1577002A2 |
| Управляемый вентильный электродвигатель | 1987 |
|
SU1458961A1 |
| Вентильный электродвигатель | 1984 |
|
SU1197019A2 |
| Вентильный электродвигатель | 1988 |
|
SU1663714A1 |
| Вентильный электродвигатель | 1987 |
|
SU1501221A2 |
| Вентильный электродвигатель | 1984 |
|
SU1201970A1 |
| Управляемый вентильный электродвигатель | 1989 |
|
SU1700705A2 |
1. ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ, содержащий статор с расположенной на нем многофазной обмоткой, каждая фаза которой включена в диагональ моста, каждое плечо которого образовано параллельно соединенными транзистором и диодом, последовательно соединенные датчик средней частоты вращения, пороговое устрой.ство и инвертирующую цепь датчик положения ротора, выходы которого подключены к управляющим входам транзисторов плеч, подключенных к началу фаз многофазной обмотки, а входы транзисторов плеч, подключенных к концам фаз многофазной обмотки, подключены к выходам датчика положения ротора через реле, управляющие входы которых подключены к выходу порогового устройства, последовательно соединенные второе пороговое устройство и реле отключения, управляющий вход которого соединен с выходом инвертирующей цепи, датчик положения ротора подключен к источнику питания через блок отключения, управляющий вход которого соединен с выходом реле отключения, вторая диагональ моста подключена к источнику питания через датчик тока, выход которого соединен с входом второго порогового устройства, на статоре двигателя расположена соосно с первой вторая многофазная обмотка, конец каждой фазы которой подключен к точке соединения между собой последовательно соединенных силовЕлх транзисторов, включенных во вторую диагональ моста, а начало подключено к концу соответствующей фазы первой многофазной обмотки, причем входы силовых транзисторов соединены с соответствующими выходами датчика положения ротора через реле, управляющие входы которых Ф подключены к выходу порогового устройства, отличающийся тем, что, с целью расширения функцио нальных возможностей путем обеспечения режима генераторного торможения в заданном диапазоне частот вращения, в него введены параллельно каждому из силовых транзисторов, соединенных с концами второй обмотки, реле обратного тока, управляю05 щие входы которых подключены к выО1 ходу порогового устройства. со 2. Электродвигатель по п. 1, отличающийся тем, что, в него введены последовательно соёко диненные логический элемент ИЛИ, вто рая инвертирующая цепь и коммутирующее реле, выход которого подключен к управляющим входам реле обратного тока, управляющий вход коммутирующего реле-подключен к выходу инверти рующей цепи, а входы логического элемента ИЛИ подключены к выходам датчика положения ротора.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Бесконтактный электродвигатель постоянного тока | 1974 |
|
SU535676A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
