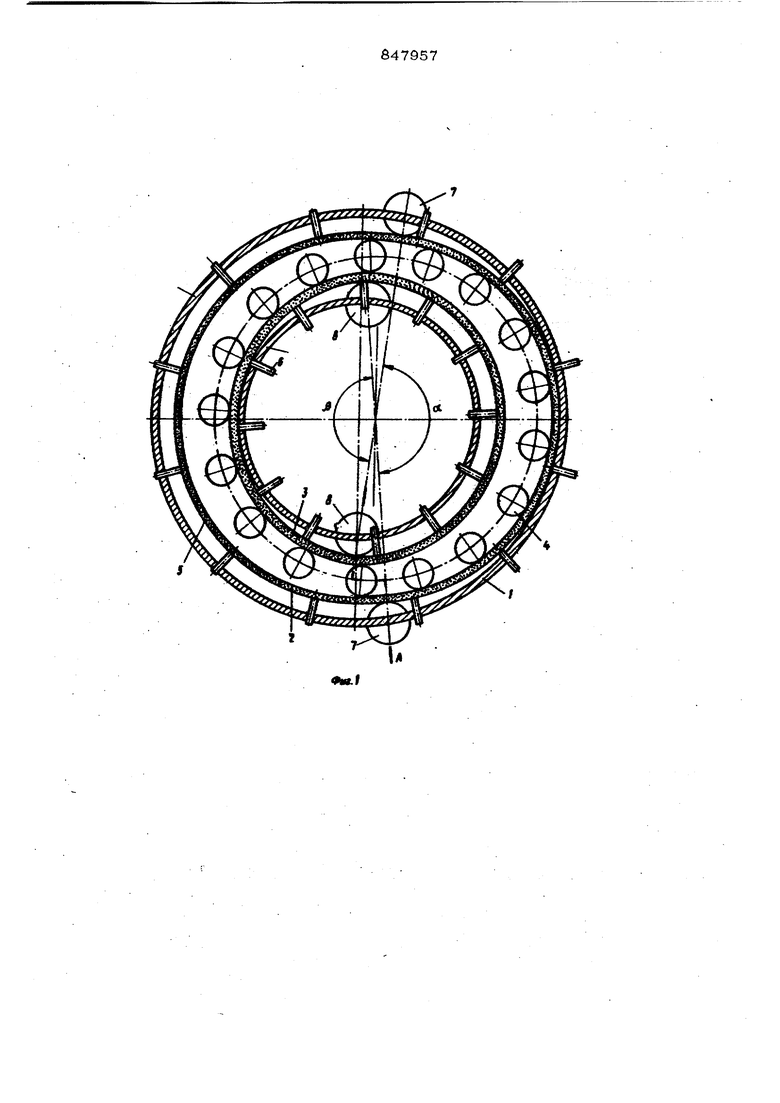
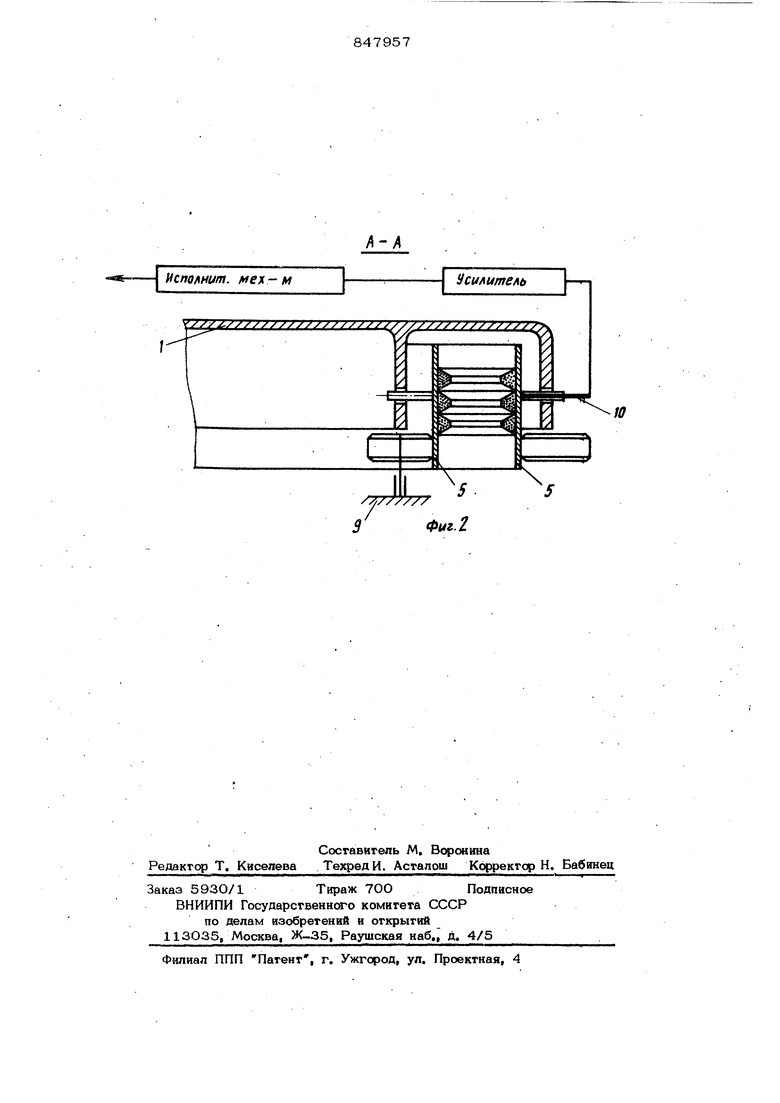
Изобретение относится к сельскохозяйственгному машиностроению, а именно к хлопкоуборочным машинам. Известен привод шпинделей, содержащий гфиводной шкив с бесксшечными ремнями (трямого и обратного вращения шпинделей и приводные ролики, установленные на шпинделях и контактирующие с ремнями С1Д. Недостатком такого привода является невозможность регулирования угла охвата шпинделей. Цель изобретения-повышение надежнос ти шпинделя в работе за счет.регулирования угла охвата шпинделей приводными ремнями. Указанная цель достигается тем, что привод шпинделей хлопкоуборочного барабана, содержащий эксцентрично установленный относительно оси барабана привод- ной шкив с кольцевым пазом, на боковых стенках которого закреплены бесконечные ремни прямого и обратного вращения шпин делей, и приводные ролики, дополнительно снабжен закрепленными на тыльных сторонах ремней каркасами в виде упругих лент с радиальными поводками и подвижными роликами, установленньпии с возможностью контакта с соответствующим каркасом и перемещения в зоне реверса шпинделей, при этом шкив имеет выполненные на стенках паза радиальные отверстия для размещения в них поводков каркаса, Каждый поводок снабжен тензоДатчиКом, электрически связанным с приводом шкива. На фиг. 1 представлен привод шпинделей; на фиг. 2 - разрез А на фиг. 1. Привод шпинделей хлопкоуборочного барабана содержит эксцентрично установленный относительно оси барабана привойной шкив 1 с кольцевым пазом, на боковых стенках которого закреплены бесконечные ремни 2 и 3 прямого и обратного вращения шпинделей. С ремнями контактируют приводные ролики 4, установленные на шпинделе. Привод снабжен закрепленными на тыльньк сторонах ремней каркасами в виде упругих лент 5 с радиальнымн поводками 6, когорые входяг в огверсгия внутренней н наружной кольцевых стенок шкива, т.е. ремни связаны со шкивом подвижно в радиальном направлении. Больший или меньший секгор охвата шпинделей ремнями оггределяется положеннем прижимных роликов 7 и 8, установленных на корпусе 9 с возможностью кон« такга с соответствующим каркасом и перемещения в зоне реверса шпинделей. Шкив имеет выполненные на стенках паза радиальные отверстия для размещения в них поводков 6 каркаса. Каждый поводок снабжен тензодатчиком Ю, электрически связанным с приводом шкива. При вращении барабана и шкива 1 в пределах угла об осуществляется процесс вкалывания хлопка в зубья шпинделей. Бла годаря наличию прижимных роликов 7 обе печивается постоянство контактных усили между шпиндельными роликами 4 и движу щимися ремнями 2 прямого вращения, В пределах угла jb шпиндельные ролики вращаются в обратном направлении, в резуль тате чего происходит съем хлопка-сырца со шпинделей. Вследствие прижатия ленты 5 с внутренней стороны прижимными роликами 8 контактные усилия между шпиндельными роликами и ремнями обратного вращения также будут постоянными. При изменении технологической нагруз кн на барабан изменяется изгибающий мо мент поводков 6, а электрический сигнал тензодатчика Ю, обусловленный деформацией поводка, усиливается и подается к исполнительному механизму вариатора при вода шкива (не показан). Таким образом, предлагаемый привод позволяет регулировать угол охвата шпи делей, что создает возможность автоматически задавать и выдерживать требуемый режим работы гфивода, что повышает его надежность в работе. Формула изобретения 1.Привод шпинделей хлопкоуборочного барабана, содержащий эксцентрично установленный относительно осибарабана при.водн( шкив с кольцевым пазом, на боковых стенках которого закреплены бесконечные ремни 1фямого и обратного вращения шпинделей, и приводные ролики, установленные на шпинделях и контактирующие с ремнями, отличающийся тем, что, с целью повьшения надежности в работе за счет регулирования угла охвата шпинделей, он снабжен закрепленными на тыльных ремней каркасами в упругйк лент с радиальными поводками и подвижными роликами, установленными с возможностью контакта с соответстеую щим каркасом и перемещения в зоне ре верса шпинделей, при этом шкив имеет выполненные на стенках паза радиальные отверстия для размещения в и ах поводков каркаса, 2,Привод поп,1, отличающий с я тем, что каждый поводок снаб Жен тензодатчиком, электрически связан-. ньш с приводом шкива, Присритет по пунктам, 12в1О„79 «о п.2, Источники информации., принятые во внимание гфи экспертизе 1, Авторское свидета1ьство СССР NO 471881, кл, А 01S 45/18, 1972.

| название | год | авторы | номер документа |
|---|---|---|---|
| Привод шпинделей вертикально-шпиндельного хлопкоуборочного барабана | 1990 |
|
SU1794383A1 |
| Привод шпинделей хлопкоуборочногобАРАбАНА | 1979 |
|
SU847956A1 |
| Привод шпинделей хлопкоуборочного барабана | 1982 |
|
SU1087107A1 |
| МЕХАНИЗМ ПРИВОДА ШПИНДЕЛЕЙ ШПИНДЕЛЬНОГО БАРАБАНА ХЛОПКОУБОРОЧНЫХ И ОЧИСТИТЕЛЬНЫХ МАШИН | 1967 |
|
SU222787A1 |
| Шпиндельный барабан хлопкоуборочного аппарата | 1985 |
|
SU1349713A2 |
| Привод шпинделей рабочей зоны вертикально-шпиндельного хлопкоуборочного аппарата | 1973 |
|
SU470274A1 |
| Стенд для испытания хлопкоуборочного барабана | 1987 |
|
SU1587371A1 |
| Привод шпинделей хлопкоуборочного барабана | 1980 |
|
SU931129A1 |
| Привод шпинделей хлопкоуборочного барабана | 1988 |
|
SU1789113A1 |
| Устройство для определения зазоров в верхних опорах и соосности ручьев приводных роликов,шпинделей,хлопкоуборочных аппаратов | 1972 |
|
SU445393A1 |