(54) УСТРОЙСТВО УПРАВЛЕНИЯ ПНЕВМАТИЧЕСКИМ ПРОТЕЗОМ РУКИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Протез кисти | 1979 |
|
SU848021A1 |
| Протез руки | 1977 |
|
SU610522A1 |
| Пневматический протез руки | 1974 |
|
SU520105A1 |
| ПРОТЕЗ РУКИ С ПНЕВМАТИЧЕСКИМ ПРИВОДОМ | 1973 |
|
SU377158A1 |
| Ортопедический аппарат | 1979 |
|
SU797682A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОТЕЗОМ РУКИ | 1972 |
|
SU326955A1 |
| ПНЕВМАТИЧЕСКИЙ МНОГОДОЗОВЫЙ БЕЗЫГОЛЬНЫЙ ИНЪЕКТОР | 2003 |
|
RU2241413C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОТЕЗОМ НИЖНЕЙ КОНЕЧНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2032434C1 |
| Пневматический протез руки | 1973 |
|
SU445429A1 |
| Пневматический винтоверт | 1977 |
|
SU776909A1 |
1
Изобретение относится к медицинской технике, а именно к протезированию дефектов верхних конечностей.
Известно устройство управления пневматическим протезом руки, содержащее п-невмопереключатель с клапаном, источник питания с редуктором, пневмодвигатели и трубопроводы Cll
Недостатком известного устройства является невозможность обеспечения независимого управления многофункциональным протезом от одного канала связи, так как для управления заданным числом двигательных функций требуется такое же количество . независимых механических движений. мышечных источников управления, что сужает показания к назначению протеза при высоких уровнях ампутаций.
Цель изобретения - обеспечение независимого управления многофункциональным протезом от одного канала связи.
Указанная цель дocти aeтcя тем, что устройство управления пневматическим протезом руки, содержащее пневмопереключатель с клапаном, источник питания с редуктором., пневмодвигатели и трубопроводы, снабжено пневмокоммутатором, выполненным в
виде исполнительного привода и блока распределения, установленных в корпусе , пневмопереключатель имеет корпус с двумя газораспределителями и эластичными уплотнениями, а на корпусе его установлен с помощью плоской пружины и шарнира рычаг, с подпружиненной клавишей, причем один газораспределитель соединен трубопро10водом с исполнительным приводом, а второй - с блоком распределения, который оснащен штоками и связан трубопроводами с пневмодвигателями.
Кроме того, в корпусе пневмопере15ключателя выполнена расточка и установлено дополнительное уплотнение под клапан.
При этом исполнительный привод выполнен в виде поршня с пружиной,
20 подпружиненного шарикового фиксатора причем на поршне выполнены углубления под фиксатор и шарнирно закреплен ролик,, контактирующий со штокги и блока распределения.
25
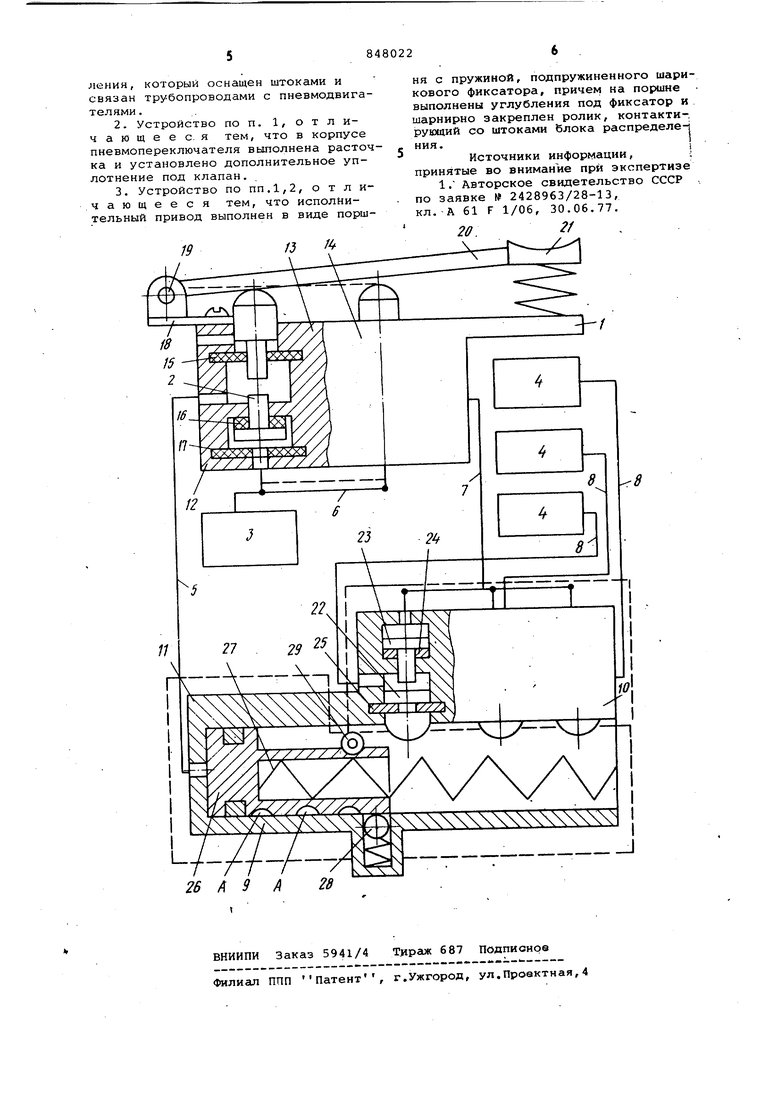
На чертеже изображена структурная схема устройства управления пневма.тическим протезом руки.
Устройство содержит пневмопереключатель 1 с клапаном 2, источник 3
30 питания с редуктором, пневмодвигатели 4, трубопроводы 5, б, 7 и 8, пневмокоммутатор, выполненный в виде исполнительного привода 9 и блока .10 распределения, установленных в корпусе 11. Пневмопереключатель 1 имеет корпус 12 с двумя гаэораспределителями 13 и 14 и эластичными уплотнителями 15,1би17, а на корпусе 12 установлен с помощью плоской пружины 18 и шарнира 19 рычаг 20 с подпружиненной клавишей 21, причем один гаэораспределитель 13 соединен трубопроводом 5 с исполнительным приводом 9, а второй гаэораспределитель 14 - трубопроводом 7 с блоком 10 распределения, который оснащен штока1 1и 22, коммутирующими клапанами 23, эластичными уплотнениями 24 и 25 и связан трубопроводами 8 с пневмодвигателями 4. Кроме того, в корпусе 12 пневмопереключателя 1 выполнена расточка и установлено дополнителное уплотнение 17 под клапан 2, исполнительный привод 9 выполнен в виде поршня 26 с пружиной 27, подпружиненного шарикового фиксатора 28, причем на поршне 26 выполнены углубления Л под фиксатор 28 и шарнирно закреплен ролик 29, контактирующий со штоками 22 блока 10 распределения.
Устройство управления пневматическим протезом руки работает следующим образом.
Для управления необходимой функцией протеза инвалид перемещением культи надплечья нажимает на клавишу 21 и рычагом 20 приводит в движение шток газораспределителя 13, который, перемещаясь, толкает клапан 2 и открывает доступ газа из источника питания 3 через трубопровод 5 в полость под поршнем 26 исполнительного привода 9. В момент открытия клапана 2, эластичное уплотнение 15 попадает на расточку штока и препятствует выхлопу газа в атмосферу. При дальнейшем движении штока клапан 2 своей шляпкой попадает на эластичное уплотнение 17 и перекрывает поступление газа в исполнительный привод 9. Газ, попадая в полость под поршнем26, приводит его в движение, и поршень 26 своим роликом 29 нажимает поочередно на штоки 22, откры.вая коммутирующие клапаны 23 блока 1 распределения, при этом происходит подсоединение газораспределителя 14 к соответствующему пневмодвигателю 4 в следующем порядке: газораспределитетц 14, трубопровод 7, коммутирующий клапан 23, трубопровод 8, пневмодвигатель 4. Открыт9е положение каждого коммутирующего клапана 23 фиксируется шариковым фиксатором 28, под действием пружины попадающим в углубление А на поршне 26, причем за счет упругости пневматической линии фиксация поршня 26 ощущается инвалидом при помощи тактильной и мышечно-суставной чувствительности. Положение поршня 26, а следовательно и открытие определенного коммутирующего клапана,определяется временем нахождения газораспределителя 13 в открытом состоянии. После срабатывания блока 10 распределения т.е. выбора двигательной функции, инвалид продолжает нажимать на клавишу 21, рычаг 20, обкатываясь вок0руг штока, деформирует плоскую пружину 18 и включает газораспределитель 14, который управляет впуском и выпуском газа из выбранного пневмодвигателя 4. Для выбора и управления
5 очередной двигательной функцией инвалид отпускает клавишу 21, которая возвращается в исходное положение, при этом происходит отсечка газа га-зораспределителем 14 и выпуск газа из исполнительного привода 9 газо0распределителем 13 через зазор между штоком и эластичны111 уплотнением 15 в атмосферу, причем поршень 26 под действием возвратной пружины 27 приводится в начальную позицию, подго$тавливая блок 10 распределения к выбору очередной двигательной функции.
Устройство обеспечивает возможность независимого управления много0функциональным протезом от одного канала связи. В результате испытаний установлено, что пневматический переключатель, выполненный в виде двух газораспределителей, обеспечивает
5 надежный выбор двигательной функции при помощи пневмокоммутатора с последующим управлением, выбранным пневмодвигателем протеза. Устройство расширяет показания к назначению про0теза инвалидам с ограниченным числом мышечных источников управления.
Формула изобретения
