Изобретение относится к области протезирования верхних конечностей при высоких уровнях ампутации, а именно к способам управления протезом руки путем механического движения органов тела инвалида.
Известные способы управления протезом руки путем механического движения органов тела инвалидов не обеспечивают надежного и эффективного управления протезом из-за ограниченной способности инвалида устанавливать силовой коммутирующий элемент в желаемую позицию.
Предлагаемый способ отличается от известных тем, что установку силового коммутирующего элемента инвалид производит первым механическим движением, а после получения, например, вибротактильной информации о правильной установки этого элемента, вторым механическим движением производит включение исполнительного механизма протеза.
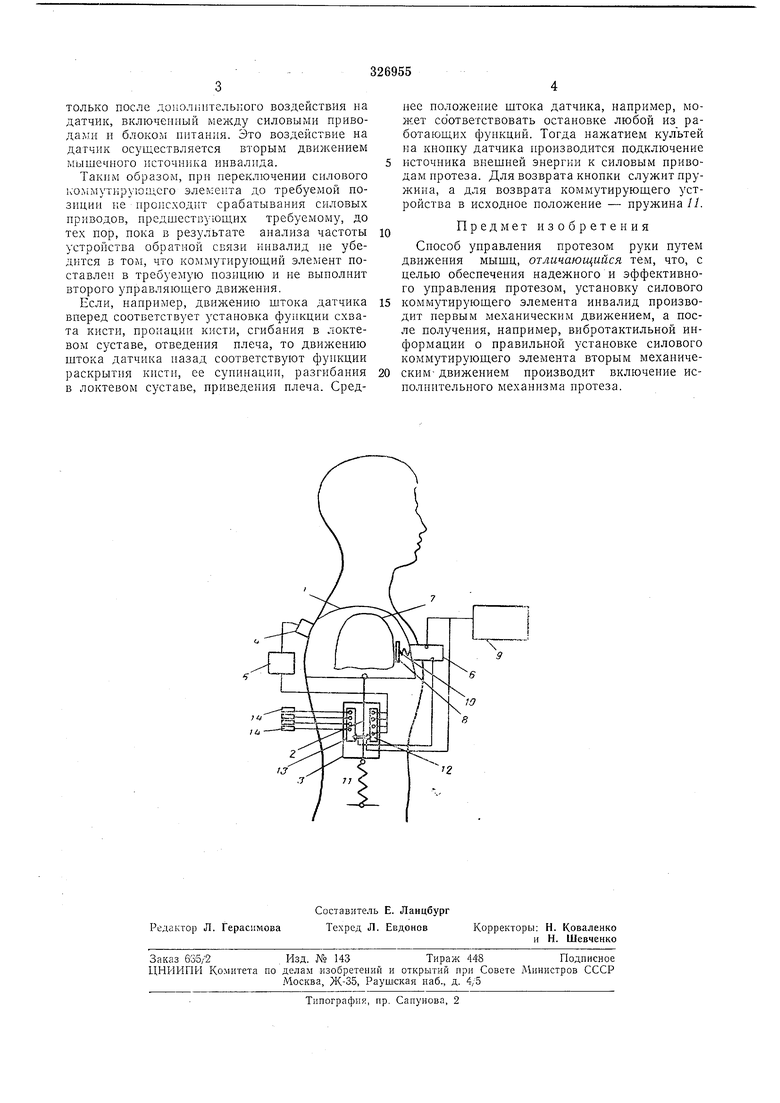
На чертеже изображена принципиальная схема устройства, реализующего предлагаемый способ.
Устройство содержит иаплечиик 1, на котором закреплена тяга 2 силового коммутирующего элемента 3, а также закреплены устройство 4 обратной связи, управляемое генератором 5, и датчик 6. Внутри наплечника находится культя 7 инвалида. Датчик 6 соприкасается с культей через кнопку 8. Устройство имеет внещний источник энергии - блок 9 питания. Кнопка приЛСимается к культе пружиной JO. В исходное положение силовой
коммутирующий элемент устанавливается пружиной 11. Коммутирующий элемент содержит две группы контактных ламелей 12 н 13, причем ламель 12 служит для управления генератором, а 13 - для подсоединения силовых приводов М.
Работа в соответствии с предлагаемым способом осуществляется следующим образом.
Подъем надплечья культи с наплечником инвалид с помощью тяги зстанавливает силовой коммутирующий элемент в положение, соответствующее выполнению требуемой функции протеза, т. е. подготавливает к функционированию силовые приводы. Безошибочную установку ему позволяет осуществлять
электромеханический вибратор обратной связи, установленный па наплечнике и соприкасающийся с культей или телом инвалида. Каждой функции протеза соответствует определенная, четко различаемая инвалидом частота колебаний электромеханического вибратора устройства обратной связи, задаваемая каким-либо генератором 5 колебаний, например, унравляемым мультивибратором.
только после дополнительного воздействия на датчик, включенный между силовыми приводами и блоком нитання. Это воздействие на датчик осуществляется вторым движением мышечного источника инвалида.
Таким образом, при переключении силового 1чОл;мутирую1дего элемента до требуемой позиции не про сходит срабатывания силовых приводов, предшествующих требуемому, до тех пор, пока в результате апализа частоты устройства обратной связи инвалид не убедится в том, что коммутирующий элемент поставлен в требуемую иозидию и не выполпит второго управляюш,его движення.
Если, например, движению штока датчика вперед соответствует установка функции схвата кисти, пронации кисти, сгибания в локтевом суставе, отведения плеча, то движению штока датчика пазад соответствуют фупкции раскрытия кисти, ее супинации, разгибания в локтевом суставе, приведения плеча. Среднее положение штока датчика, например, может соответствовать остановке любой из работающих фупкции. Тогда нажатием культей на кнопку датчика производится подключение источника внешней энергии к силовым приводам протеза. Для возврата кнопки служит пружина, а возврата коммутирующего устройства в исходное положение - пружина //.
Предмет изобретения
Способ управления протезом руки путем движения мышц, отличающийся тем, что, с целью обеспечения надежного и эффективного управления протезом, установку силового коммутирующего элемента инвалид производит первым механическим движением, а после получения, например, вибротактильной информации о правильной установке силового коммутирующего элемента вторым механическим- движением производит включение исполнительного механизма протеза.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2015 |
|
RU2615278C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ ПЛЕЧА | 2019 |
|
RU2744605C2 |
| УСТРОЙСТВО ДЛЯ СРАВНИТЕЛЬНЫХ ИСПЫТАНИЙ СИСТЕМ УПРАВЛЕНИЯ АКТИВНЫХ МНОГОФУНКЦИОНАЛЬНЫХ ПРОТЕЗОВ ПЛЕЧА РАЗРАБОТЧИКОМ СО ЗДОРОВЫМИ РУКАМИ | 2020 |
|
RU2744657C1 |
| Протез руки | 1989 |
|
SU1727824A1 |
| Искусственная механическая рука | 1945 |
|
SU67476A1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 1993 |
|
RU2068247C1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2013 |
|
RU2541816C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 1993 |
|
RU2068246C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 2010 |
|
RU2427349C1 |
| Устройство для управления протезами верхних конечностей | 1984 |
|
SU1333332A1 |
J
2
