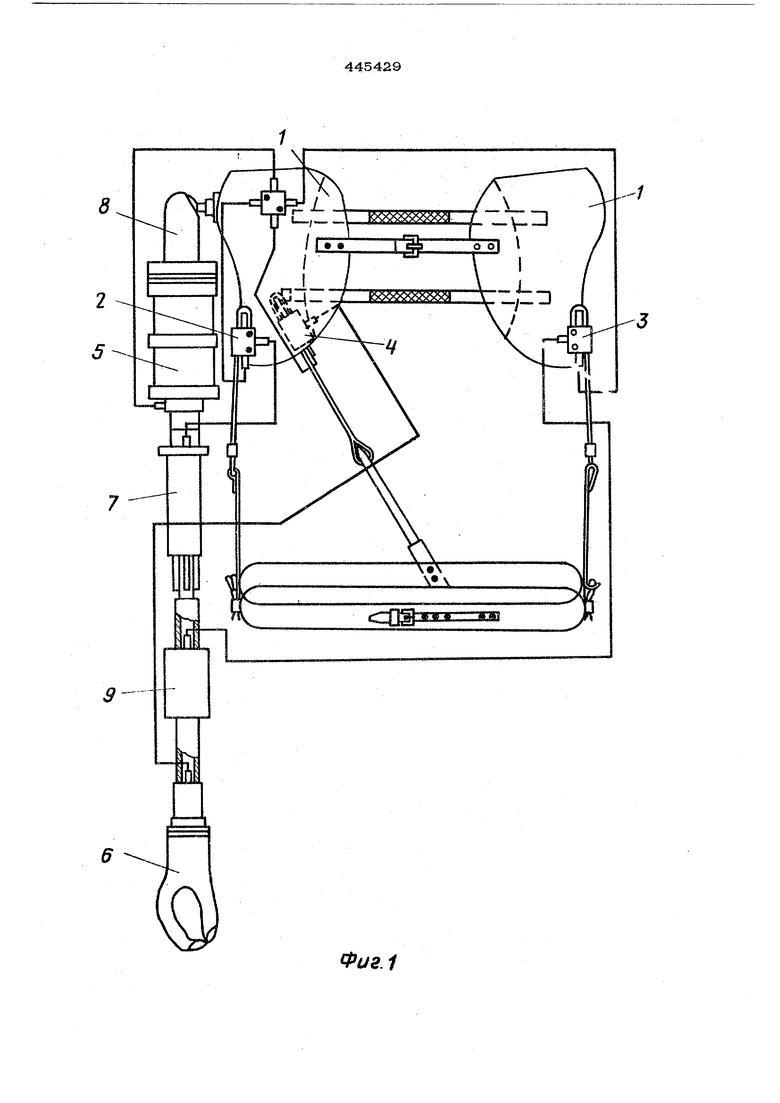
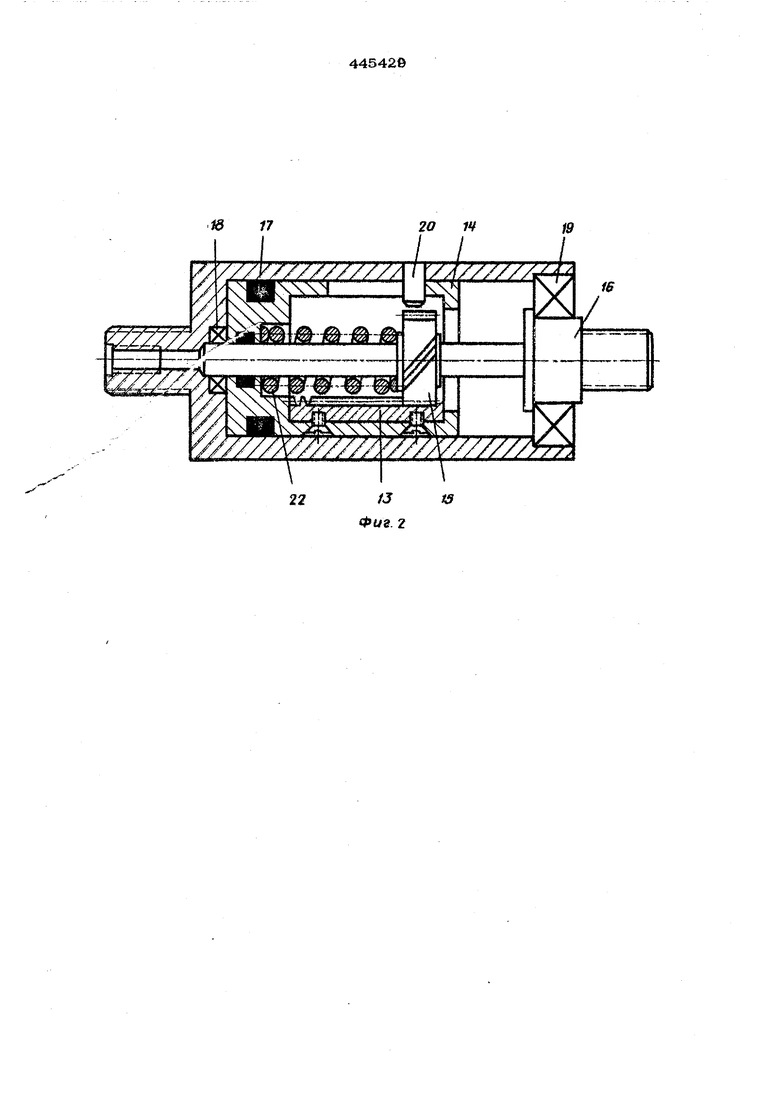
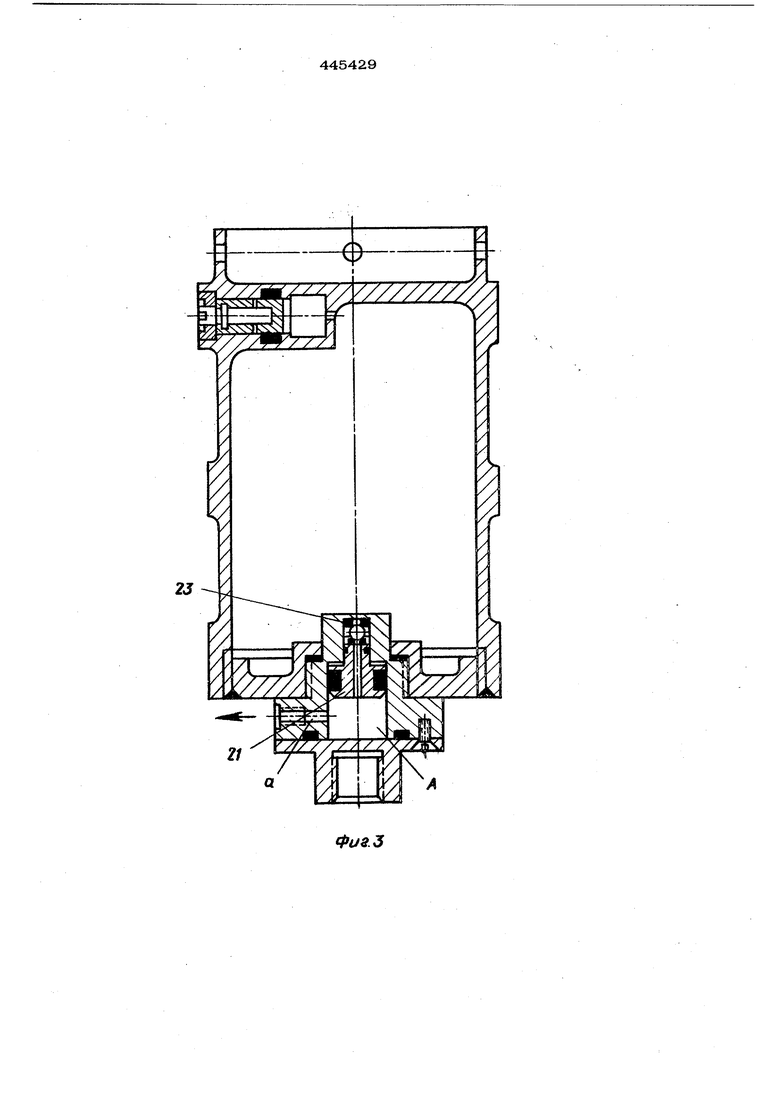
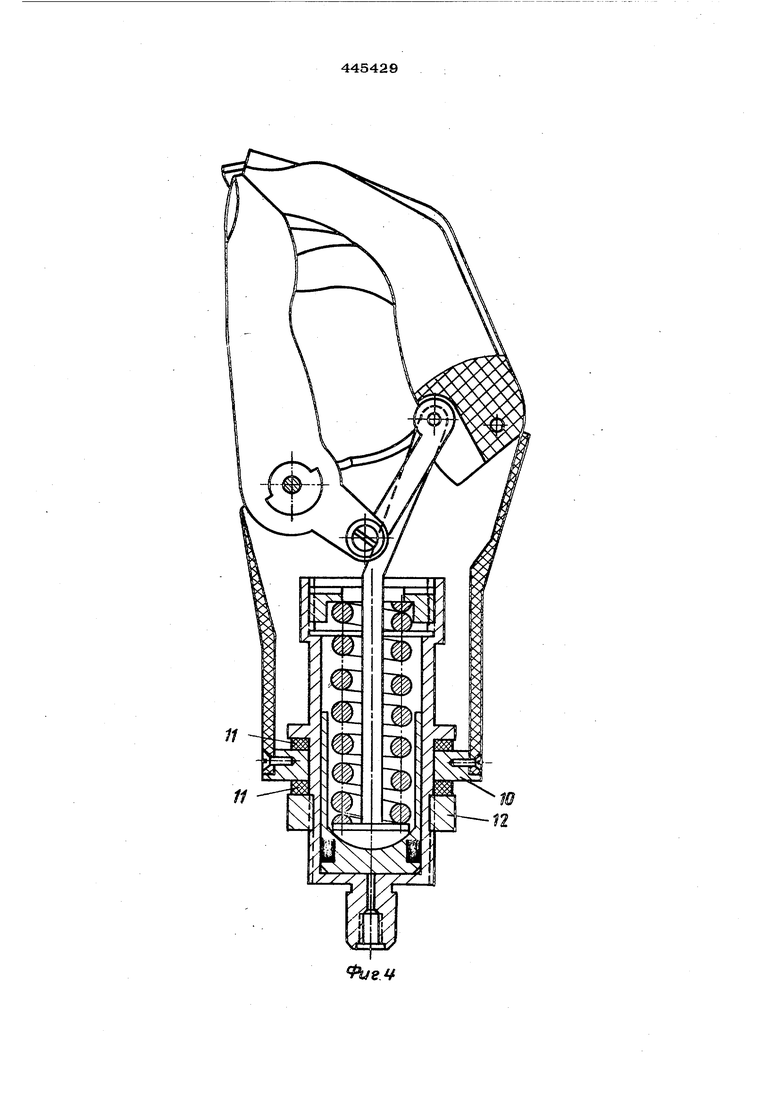
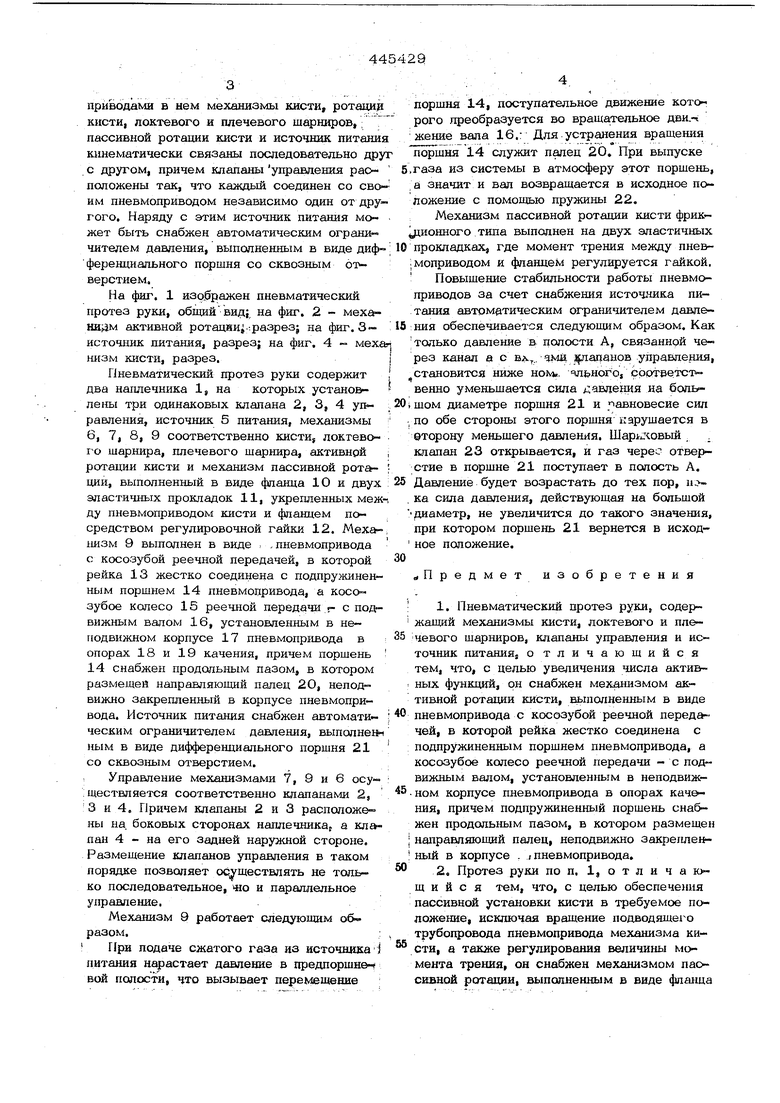
Избретение относится к области медииинь а именно .к пpoтeзиpoвадию Jфoтeзc cгpoeнию Известен пневматический протез руки, со держащий несущую гильзу, механизмы кисти, локтевого и плечевого шарниров, редукцион- ный клапан, источник питания и блок управления с клапанами, выполнен11ыми в виде золотникового механизма, подпружиненного сжатым газом, где управляющая тяга посредством блока огибает золотник н крепит ся одним концом к корпусу блока управления, другим - к креплениям, а каналы на золотнике выполнены так, что при нахождении его в верхнем положении каналы, св зывающие полость пневмопривода с НИКОМ питания и атмосферой, перекрыты, при среднем положении золотника полость пневмопривода сообщается с атмосферой, а ;при нижнем - с источником питания. Известный протез не обладает достаточ ной функщ1она;1ьностью, не позволяет пронэ водить пассивную установку кисти в требуеН ;Мое положение без вращения подводящего трубопровода механизма кисти и регулировать величину MOMei T тре1шя и не обесп& вает параллельного управления пневмоприводами. Кроме того, протез характеризуется недостаточно высокой стабильностью работы его пневмоприводов. С целью устранения вышеуказанных недостатков предлагаемый протез снабжен механизмом активной ротации кисти, выполненным в виде пневмопривода с косозубой реечной передачей, в которой рейка жестко соединена с подпружиненным псфщнем пневмо привода, а косозубое колесо реечной передачи соединено с подвижным вал ом, установ ленным в неподвижном корпусе пневмопр ; вода в опорах качения, причем подпружиненный поршень снабжен продольным пазом, в itOTqboM размещен направляющий палец, неподвижно закрепленный в корпусе пневмо привода. Кроме того, он может быть снабжен механизмом пассивной ротации, выполненным в виде фланца и двух эластичных прокладок, например резиновых колец, укрепленных ме ; ду пневмоприводом кисти и фланцем посреД ством регулировочной гайки, а для обеспечения одновременного управления пневмоприводами в нем механизмы кисти, ротации кисти, локтевого и плечевого шарниров, пассивной ротации кисти и источник питания кинематически связаны последовательно дру с другом, причем клапаны управления расположены так, что каждый соединен со своим пневмоприводом независимо один от другого. Наряду с этим источник питания может быть снабжен автоматическим ограничителем давления, выполненным в виде дифференциального поршня со сквозным сп верстием. На фиг. 1 изображен пневматический протез руки, общийвид; на фиг. 2 - механийм активной ротацни;---разрез| на фиг. 3- источник питания, разрез; на фиг. 4 - меха низм кисти, разрез. Пневматический протез руки содержит два наплечника 1, на которых установленоы три одинаковых клапана 2, 3, 4 уп равления, источник 5 питания, механизмы 6, 7, 8, 9 соответственно кисти5 локтевого шарнира, плечевого шарнира, активной ротации кисти и механизм пассивной ротации, выполненный в виде фланца 10 и двух эластичных прокладок 11, укрепленных между пневмоприводом кисти и фланцем посредством регулировочной гайки 12. Мехалшзм 9 выполнен в виде , , пневмопривода с косозубой реечной передачей, в которой рейка 13 жестко соединена с подпружиненным поршнем 14 пневмопривода, а косозубое колесо 15 реечной передачи г- с подвижным валом 16, установленным в неподвижном корпусе 17 пневмопривода в опорах 18 и 19 качения, причем поршень 14 снабжен продольным пазом, в котором размещей направляющий палец 20, неподвижно закрепленный в корпусе пневмопривода. Источник питания снабжен автоматическим ограничителем давления, выполненным в виде дифференциального поршня 21 со сквозным отверстием. Управление механизмами 7, 9 и 6 осулцествляется соответственно клапанами 2, 3 и 4. Причем клапаны 2 и 3 расположе- ны на. боковых сторонах наплечника а кла пан 4 - на его задней наружной стороне. Размещение клапанов управления в таком порядке позволяет осуществлять не только последовательное, «о и параллельное управление. Механизм 9 работает следующим об разом. При подаче сжатого газа из источника питания нарастает давление в предпоршне-f вой полости, что вызывает перемещение поршня 14, поступательное движение которого преобразуется во враща.тельное дви.ч жение вала 16.: Для устранения вращения поршня 14 служит палец 20. При выпуске 5,газа из системы в атмосферу этот поршень, а значит и вал возврашается в исходное положение с помощью пружины 22. Механизм пассивной ротации кисти фрик ционного типа выполнен на двух эластичных 0 прокладках, где момент трения между пнев,моприводом и фланцем регулируется гайкой. Повышение стабильности работы пневмоприводов за счет снабжения источника пи-тания автоматическим ограничителем давлеб:ния обеспечивается следующим образом. Как только давление в полости А, связанной через канал а с вл.. чмд цд. управления, становится ниже нок. чльного, еортветственно уменьшается сила давления на боль0;шом диаметре поршня 21 и «равновесие сил -по обе стороны этого поршня нарушается в еторону меньшего давления. . клапан 23 открывается, и газ черео отверстие в поршне 21 поступает в полость А. 5 Давление будет возрастать до тех пор, и. . ка сила давления, действующая на большой -диаметр, не увеличится до такого значения, при котором поршень 21 вернется в исходное положение, 0 Предмет изобретения 1. Пневматический протез руки, содержащий механизмы кисти, локтевого и пле- чевого шарниров, клапаны управления и источник питания, о тличаюшийся тем, что, с целью увеличения числа активных функций, он снабжен механизмом активной ротации кисти, вьшолненным в виде 0 пневмопривода с косозубой реечной передачей, в которой рейка жестко соединена с подпружиненным поршнем пневмопривода, а косозубое колесо реечной передачи - с подвижным валом, установленным в неподвиж- ном корпусе пневмопривода в опорах кач&ния, причем подпружиненный поршень снабжен продольным пазом, в коа-ором размещен направляющий палец, неподвижно закреплеиный в корпусе . (Пневмопривода. 2. Протез руки по п. 1, о т л и ч а ющ и и с я тем, что, с целью обеспечения пассивной установки кисти в требуемое положение, исключая вращение подводяще о трубопровода пневмопривода механизма кисти, а также регулирования величины момента трения, он снабжен механизмом пассивной ротации, выполненным в виде флашха
н двух эластичных прокладок, например ре-, зи новых конец, укрепленных между пневмо|приводом кисти и фланцем посредством регулировочной гайки.
3. Протез руки по пп. 1 и 2, о т л ичающнйся тем, что, с целью обео печения одновременного управления пневмоприводами, в нем механизмы кисти, активной ротации кисти, локтевого и плечевого шар1шров, пассивной ротации кисти и исто г ник питания кинематически связаны посл&- 6
довательно друг с другом, причем клапаны управления расположены так, что каждый соединен со своим пневмоприводом независимо один от другого.
5 4. Протез руки по пп, 1, 2 и 3, о тличающнйся тем, что, с целью повышения стабильности работы его пневмоприводов, источник питания снабжен автомати ерким ограничителем давления, вьшол10 ненным в виде дифференциального поршня СО сквозным отверстием.
Фиг. 1 30/7 2О 14
21
а
Физ.З
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2013 |
|
RU2541816C2 |
| ПНЕВМАТИЧЕСКИЙ ПРОТЕЗ РУКИ | 1971 |
|
SU312605A1 |
| Протез руки | 1977 |
|
SU610522A1 |
| ПРОТЕЗ РУКИ С ПНЕВМАТИЧЕСКИМ ПРИВОДОМ | 1973 |
|
SU377158A1 |
| Протез руки | 1989 |
|
SU1727824A1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ ПЛЕЧА | 2019 |
|
RU2744605C2 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2015 |
|
RU2615278C2 |
| Пневматический протез руки | 1974 |
|
SU520105A1 |
| ЛЕЧЕБНО-ТРЕНИРОВОЧНЫЙ ПРОТЕЗ РУКИ | 1994 |
|
RU2082359C1 |
| ПНЕВМАТИЧЕСКИЙ ПЛЕЧЕВОЙ ШАРНИР ПРОТЕЗА ПОСЛЕ ВЫЧЛЕНЕНИЯ ПЛЕЧА | 1970 |
|
SU278961A1 |