1. .
Изобретение относится к машиностроению и может быть использовано при создании станков, машин и приборов.
Известен реверсивный механизм,содержащий ведущее звено, включающее ведущий вал с размещенным на нем зубчатым колесом, ведомый вал и два ведомых колеса, установленных на нем и взаимодействующих с зубчатым колесом, размещённым на ведущем валу, каждое из зубчатых колес имеет неполный зубчатый венец с увеличенными зубьями в начале и конце венца для правильного входа в зацепление. Реверс обеспечивается вращением ведущего Всша по часовой и против часовой стрелки И
Наиболее близким по технической сущности и достигаемому результату к изобретению является реверсивный механизм, содержащий ведущее звено, включа оцее ведущую звездочку и гибкий элекюнт/.ведомое колесо и два блока,, каждый из которых несет вал, жестко установленные на нем координационную шестерню, колесо, взаимюдействукяцве с ведокшм колесом, и фрикционные диски 12.
Однако известный механизм усложнен наличием устройства, перебрасы.
вающего и поочередно прижимающего гибкую связь к фрикционным дискам. Не обеспечивается постоянная связь ведущего и ведомого звеньев - в-момент переброски гибкой связи ведущее звено работает вхолостую, что ведет к непроизводительной затрате энергии и невозможности применения механизма в устройствах, работающих с непрекра10щакяцимися нагрузками. Механизм не обеспечивает постоянно заданное число оборотов ведомого звена из-за проскальзывания в моменты реверсирования и холостой работы ведущего звена при
15 переброске гибкой связи.
Цель изобретения - упрощение механизма и обеспечение стабильности оборотов ведомого колеса, исключение пробегов ведущего звена и обеспечение
20 полного совмещения зубьев цепи и координационных шестерен.
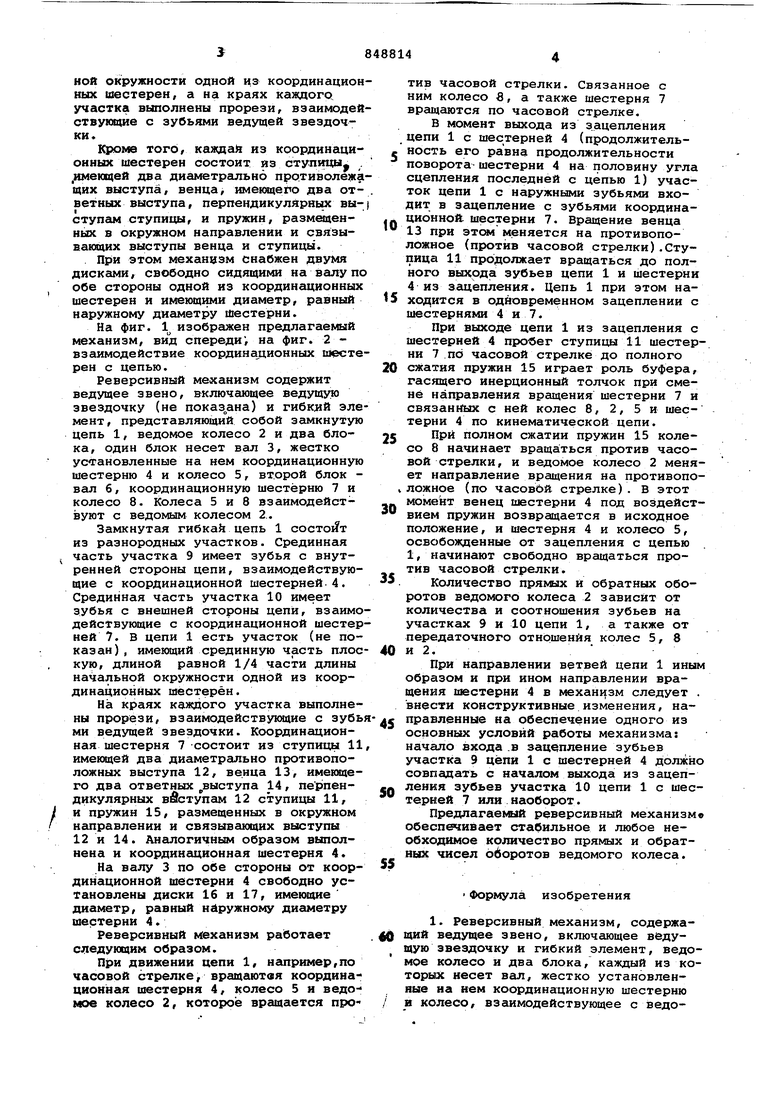
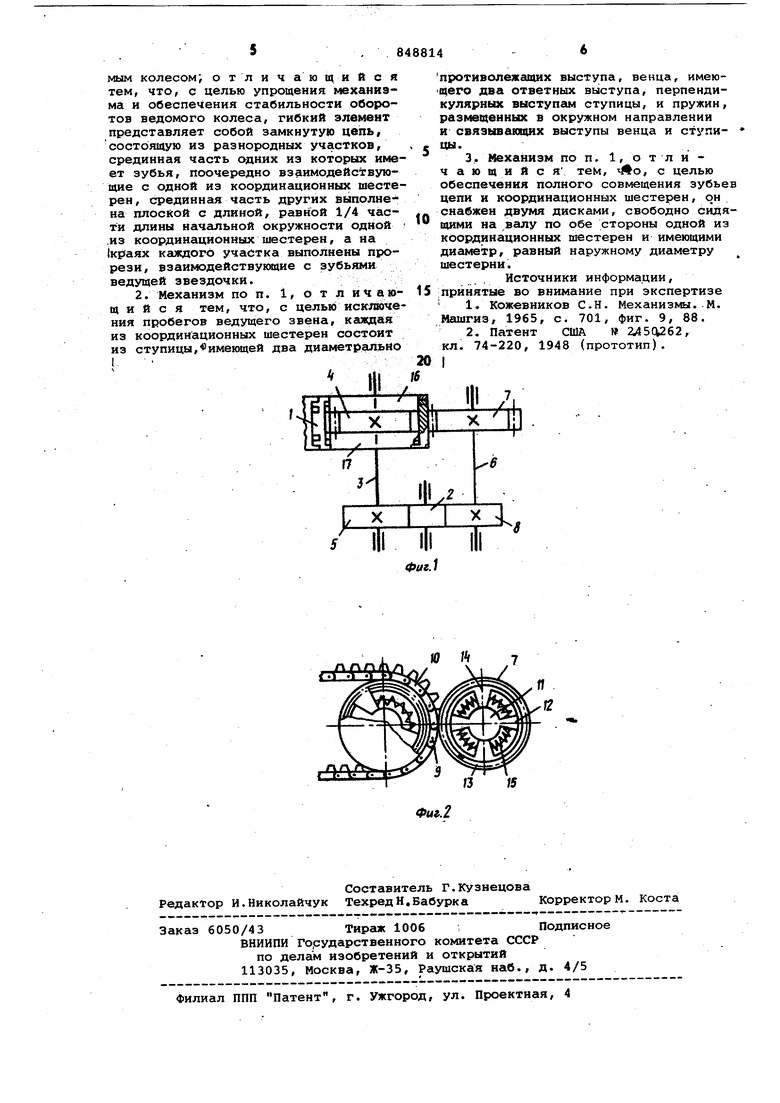
Указанная цель достигается тем, что гибкий элемент представляет собой замкнутую цепь, состоящую иа разно25родных участков, срединная часть одних из которых имеет зубья, поочередно взаимодействующие .с одной из координационных шестерен, срединная часть других выполнена плоской с длиной, равной 1/4 части длины начгшьЭОной окружности одной из координацион ных шестерен, а на краях каждого участка выполнены прорези, взаимодей ствующие с зубьями ведущей звездочки. Кроме того, кажда) из координационных шестерен состоит ИЗ СТУПИЦЫу . имеющей два диаметрально противолежа щих выступа, венца, имеющего два ответных выступа, перпендикулярных выступам ступицы, и пружин, размещенных в окружном направлении и связывающих выступы венца и ступицы. При этом механизм снабжен двумя дисками, свободно сидящими на валу по обе стороны одной из координационных шестерен и имеющими диаметр, равный наружному диаметру шестерни. На фиг. 1 изображен предлагаемый механизм, вид спереди; на фиг. 2 взаимодействие координационных шесте рен с цепью. Реверсивный механизм содержит ведущее звено, включающее ведущую звездочку (не показ ана) и гибкий эле мент, представляющий собой згилкнутую цепь 1, ведомое колесо 2 и два блока, один блок несет вал 3, жестко установленные на нем координационную шестерню 4 и колесо 5, второй блок вал б, координационную шестерню 7 и колесо 8, Колеса 5 и 8 взаимодействуют с ведомЕлм колесом 2.. Замкнутая гибка цепь 1 состоит из разнородных участков. Срединная часть участка 9 имеет зубья с внутренней стороны цепи, взаимодействующие с координационной шестерней 4. Срединная часть участка 10 имеет ЗУбья с внешней стороны цепи, взаимо действующие с координационной шестер ней 7. В цепи 1 есть участок (не показан) , имеющий срединную часть плос кую, длиной равной 1/4 части длины начальной окружности одной из координационных шестерён. На краях каждого участка выполнены прорези, взаимодействукмцие с зубь ми ведущей звездочки. Координационная шестерня 7 состоит из ступицы 11 имекицей два диаметрально противоположных выступа 12, венца 13, имекхцего два ответных выступа 14, перпендикулярных вдступам 12 ступицы 11, и пружин 15, размещенных в окружном направлении и связывающих выступы 12 и 14. Аналогичным образом выполнена и координгиционная шестерня 4. На валу 3 по обе стороны от координационной шестерни 4 свободно установлены диски 16 и 17, имекмцие диаметр, равный наружному диаметру шестерни 4. Реверсивный механизм работает следующим образом. При движении цепи 1, например,по часовой стрелке, вращаютая координационная шестерня 4, колесо 5 и ведомое колесо 2, которое вращается про« тив часовой стрелки. Связанное с ним колесо 8, а также шестерня 7 вращаются по часовой стрелке, В момент выхода из з.ацепления цепи 1 с шестерней 4 (продолжительность его равна продолжительности поворота шестерни 4 на половину угла сцепления последней с цепью 1) участок цепи 1 с наружными зубьями входит в зацепление с зубьями координационной, шестерни 7. Вращение венца 13 при этсям меняется на противоположное (против часовой стрелки).Ступица 11 продолжает вращаться до полного выхода зубьев цепи 1 и шестерни 4 из зацепления. Цепь 1 при этом нахс цится в одновременном зацеплении с шестернями 4 и 7. При выходе цепи 1 из зацепления с шестерней 4 пробег ступицы 11 шестерни 7 по часовой стрелке до полного сжатия пружин 15 играет роль буфера, гасящего инерционный толчок при смене направления вращения шестерни 7 и связаН1Л:1х с ней колес 8, 2, 5 и шестерни 4 по кинематической цепи. При полном сжатии пружин 15 колесо 8 начинает вращаться против часовой стрелки, и ведомое колесо 2 меняет направление вращения на противоположное (по часовЪй стрелке). В этот момент венец шестерни 4 под воздействием пружин возвращается в исходное положение, и шестерня 4 и колесо 5, освобожденные от зацепления с цепью 1, начинают свободно вращаться против часовой стрелки. Количество прямых и обратных оборотов ведомого колеса 2 зависит от количества и соотношения зубьев на участках 9 и 10 цепи 1, а также от передаточного отношения колес 5, 8 и 2. При направлении ветвей цепи 1 иным образом и при ином направлении вращения шестерни 4 в механизм следует . внести конструктивные изменения, направленные на обеспечение одного из основных условий работы механизма: начало входа .в зацепление зубьев участка 9 цепи 1 с шестерней 4 должно совпадать с началом выхода из зацепления зубьев участка 10 цепи 1 с шестерней 7 или наоборот. Предлагаемый реверсивный механизме обеспечивает стабильное и любое необходимое количество прямых и обратных чисел оборотов ведомого колеса. Формула изобретения 1. Реверсивный механизм, содержаЩий ведущее звено, включающее ведущую звездочку и гибкий элемент, ведомое колесо и два блока, каждый из которых несет вал, жестко установленные на нем координационную шестерню и колесо, взаимодействующее с ведомым колесом; о т л и ч ающи и с я тем, что, с целью упрощения механизма н обеспечения стабильности оборотов ведомого колеса, гибкий элемент представляет собой замкнуту{о цепь, состоящую из разнородных участков, срединная часть одних из которых име ет зубья, поочередно взаимодействующие с одной из координационных шесте рен , срединная часть других выполнена плоской с длиной, равной 1/4 части длины начсшьной окружности одной .из координационных шестерен, а на 1кЕ«аях ксшсдого участка выполнены прорези, взаимодействующие с зубьями ведущей звездочки. 2. Механизм по п. 1, о т л ич ающи и с я тем, что, с целью искл1Юче ния пробегов ведущего звена, каждая из координационных шестерен состоит из ступицы,«имеющей два диаметрально противолежащих выступа, венца, имеюЩего два ответных выступа, перпендикулярных выступам ступицы, и пружин, размещенных в окружном направлении и связывающих выступы венца и ступицы. 3. Механизм по п. 1, о т л и чающийся тем, Ло, с целью обеспечения полного совмещения зубьев цепи и координационных шестерен, он снабжен двумя дисками, свободно сидящими на ,валу по обе стороны одной из координационных шестерен и имеющими диаметр, равный наружному диаметру шестерни. Источники информации, .принятые во внимание при экспертизе 1. Кожевников С.Н. Механизмы. М. Машгиз, 1965, с. 701, фиг. 9, 88. 2. Патент США гД5(Уб2, кл. 74-220, 1948 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД СКВАЖИННОГО НАСОСА | 2007 |
|
RU2353807C2 |
| Тормозная втулка велосипеда | 1983 |
|
SU1189724A1 |
| Привод канатно-угольной пилы | 1984 |
|
SU1191577A1 |
| Звездочный цепной вариатор Сидора | 1990 |
|
SU1802250A1 |
| Предохранительная муфта | 1982 |
|
SU1211493A1 |
| ПРИВОД СКВАЖИННОГО НАСОСА | 2006 |
|
RU2368805C2 |
| МУФТА СВОБОДНОГО ХОДА | 1996 |
|
RU2114337C1 |
| ПЛАВУЧАЯ ПРИБРЕЖНАЯ ГИДРОВОЛНОВАЯ ЭЛЕКТРОСТАНЦИЯ | 2012 |
|
RU2603849C2 |
| МЕХАНИЗМ БЛОКИРОВКИ ДИФФЕРЕНЦИАЛА ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 1995 |
|
RU2091249C1 |
| ВОЛНОВАЯ НЕСООСНАЯ ПЕРЕДАЧА | 1995 |
|
RU2092728C1 |
Ю Jtl
О /5
