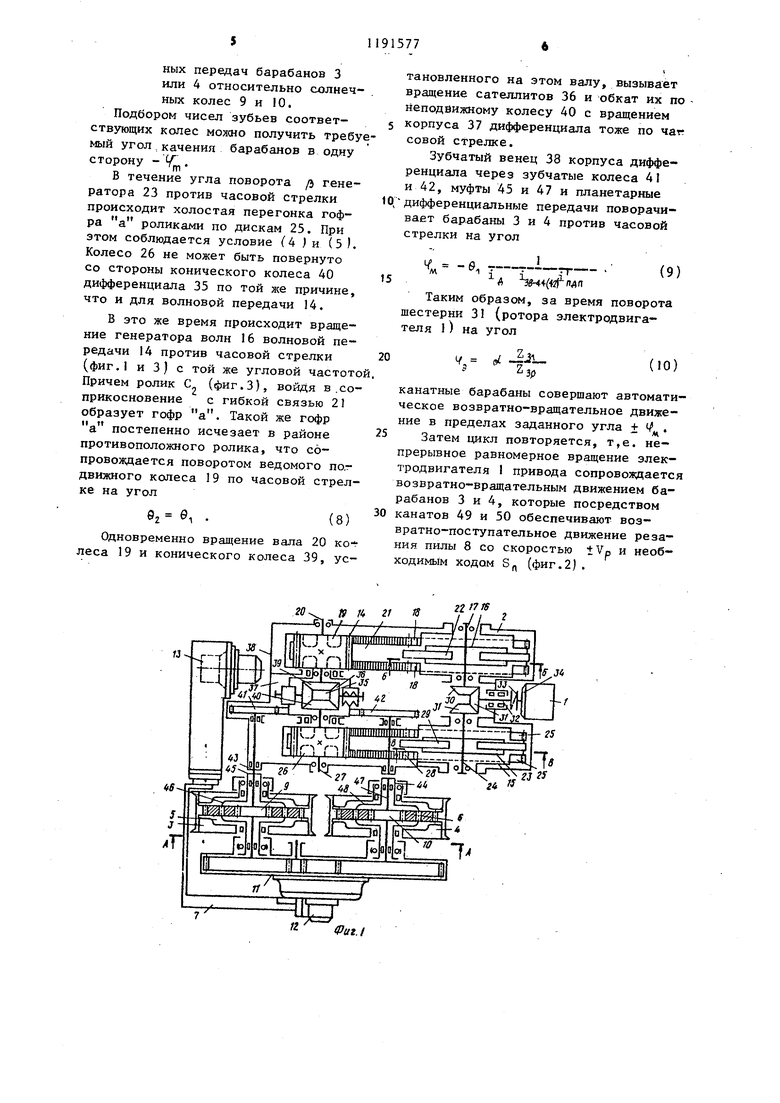
Изобретение относится к оборудованию для механизации выемки полезных ископаемых с помощью узкозахват ных челночных(реверсивных) преимущественно угольных и соляных канатно-цепных пил. Цель изобретения - снижение металлоемкости и динамических нагрузок привода. На фиг.1 приведена принципиальнал схема привода канатно-цепной пилы; на фиг.2 - разрез А-А на фиг. на фиг.З - разрез Б-Б на фиг.1; на фиг.4 - разрез В-В на фиг.1. Привод канатно-цепной пилы состоит из электродвигателя I, редуктора режущей части 2 с механизмом реверсирования параллельно расположенных мезвду собой канатных барабан 3 и А, в каждом из которых расположены дифференциальные планетарные зубчатые передачи 5 и 6 и механизм, подачи 7 пилы 8, кинематически связанной с солнечными шестернями 9 и передач 5 и 6 посредством вспомогательного редуктора. 1 1, -получающего вращения от гидромотора 12, приводимого в действие насосом 13. Редуктор режущей части 2 с механизмом реверсирования состоит из дв несоосных волновых зубчатых передач 14 и 15. Передача 14 включает многороликовый генератор волн 16,за крепленный на валу 17, неподвижное зубчатое колесо 18, состоящее из двух зубчатых дисков, расположенных симметрично по обе стороны генерато ра волн 16, ведомое подвижное жесткое зубчатое колесо 19, установленное на валу 20. Генератор 16, колеса 18 и 19 объединены гибкой связью 21, представляющей ко цо с двумя рядами зубьев и беговой дорожкой между ними для роликов 22 генератора 16. Передача 15 состоит также из ген ратора волн 23 на валу 24, неподвиж ного колеса 25 из двух дисков, ведо мого колеса 26 с валом 27 гибкой св зи 28 с беговой дорожкой для роликов 29 генератора 23. Вал 17 генератора волн 16 связан с трехзвенной конической передачей 30-31-30 с валом 24 генератора волн 23. Ведущая шестерня 31 этой передачи установлена на валу 32, соединенном муфтой 33 с валом 34 электро двигателя. Вал 20 подвижного ведомо го колеса 19 связан с валом 27 подвижного колеса 26 посредством конического зубчатого дифференциала 35, оси сателлитов 36 которого установлены в корпусе 37 Корпус снабжен зубчатым венцом 38 и является как бы ведомым валом редуктора 2. На валах 20 и 27 установлены конические колеса дифференциала 39 и 40. Венец 38 находится в постоянном зацеплении с двумя шестернями 41 и 42, установленными на валах 43 и 44. Вал 43 соединен муфтой 45 с водилом 46 дифференциальной планетарной передачи 5 барабана 3, а вал 44 соединен муфтой 47 с водилом 48 передачи 6 барабана 4 . Количество роликов в каждом генераторе волн принимается четным, например Z 4. На фиг.З и 4 зафиксировано характерное положение генераторов волн 16 и 23. Из фиг. 3 и 4 видно, что один из роликов 22 генератора 16 и 23 в верхнем положении В имеет совпадающие оси. Так как ролики каждого генератора равномерно размещены по окружности радиуса R, по оси остальных Трех пар роликов в этом положении также, совпадают. Нужная координация генераторов волн может быть осуществлена при сборке следующим образом. Ведущая шестерня 3 изготавливается с четным числом зубьев. Ведомые колеса могут изготавливаться с четным или нечетным числом зубьев. При сборке генератор 16 закрепляется на валу 17 так, что радиальная ось симметрии какого-то одного зуба колеса и линия, соединяющая цент вращения одного из роликов с осью вращения вала, образуют между собой угол сборки сб - 2 где jp - угол активного взаимодействия ролика с гибким звеном передачи, определяемый из выражения RO -гр 2 arccos где (фиг.4 RO - радиус обката, совг падающий с начальной окружностью неподвижных колес 18 и 25; Гр - радиус ролика; R - радиус окружности роликов. Так же координируется при сборке генератор 23 на валу 24 другого конического колеса 31, причемзубья, от которых отсчитывается угод , маркируются на обоих колесах 3I. Кроме того, угол размещения осей роликов на окружности радиуса находится по формуле где Z - четное число роликов по усло вию синхронности работы ветвей гибкого звена. Очевидно, что ,oi /5 5 + Г. если принять fl Т 0 2у .(5) Относительная координированность генераторов волн при сборке осущест вляется следующим образом: ведущая шестерня 31 в круговом-направлении выставляется так, что горизонтальная плоскость проходит через ось вращения шестерни и оси симметрии двух пр тивоположных впадин между зубьями шестерен, после чего в эти впадины вводятся маркированные зубья ведомых колес 31, в результате оси вращения двух роликов 22 и 29 совпадают, как это изображено на фиг.З и 4. Барабаны 3 и 4 привода соединены с пилой 8 тяговыми каналами 49 и 50. Предложенный привод канатно-цепной пилы работает следующим образом. При вращении электродвигателя 1, вала 34, муфты 33 и вала 32 получает вращение ведущая шестерня 31 трех звенной конической передачи, например, по часовой стрелке. Соответственно ведомое колесо 30, вал 24 и генератор 23 вращаются против часово стрелки с угловой частотой - tu.( (фиг.1 и 4 ). Вращение генератора 23 вызьшает образование нижним роликом Н (см. фиг.З) гофра а в пределах угла . Одновременно происходит исчезновение гофра а в окрестностя верхнего ролика В. Средний ролик С производит холостую перегонку гофра . Число зубьев гибкого звена связи 28 в пределах гофра 2 не равно числу зубьев каждого из неподвияр ных зубчатых дисков колеса 25, огра74ниченных пределами этого гофра. Поэтому перемещение гофров а вызывает перебор зубьев дисков и гибкой связи 28, окружное перемещение последнего и вращение жесткого колеса 26 против часовой стрелки на угол. -где 42 - разность зубьев в пределах одного гофра а и неподвижного диска,-ограниченного пределами этого гофра; Z, число зубьев жесткого неподвижного колеса. В это же время от ведущей шестерни 31 трехзвенной передачи через второе ведомое колесо 30 и генератор волн 16 получают, вращение по часовой стрелке (фиг.1 и 3}. При этом верхний ролик В и средний ролик С осуществляют холостую перегонку гофров а, а нижний ролик Н и средний ролик С2 движутся вхолостую, поэтому гибкая связь 21 не имеет окружного перемещения и не может повернуть подвижное жесткое железо 19 по часовой стрелке, которое не может быть повернуто и со стороны конического колеса 39 дифференциала 35, так как окружному перемещению гибкой связи 21 препятствует сцепление его зубьев с зубьями неподвижных дисков колеса 18 между гофрами роликов (самоторможение передачи ). Следова-тельно, вращение вала 27 и конического колеса 40 на угол в вызывает вращение сателлитов 36, их обкатывание по неподвижному коническому колесу 39, а также вращение корпуса 37 дифференциала тоже против часовой стрелки. Зубчатый венец 38 корпуса поворачивают зубчатые колеса 41 и 42 с валами 43 и 44, которые враЩаются по часовой стрелке. От этих валов через муфты 45 и 47 получают вращение в ту же сторону водила 46 и 48 дифференциально планетарных передач барабанов 3 и 4. Барабаны поворачиваются по часовой стрелке (см. фиг.2) на угол ЭД-41(2) где 1 - передаточное отношение конического дифференциала при неподвижном колесе 39,передаточное отношение планетарных дифференциальных передач барабанов 3 или 4 относительно солнечных колес 9 и 10. Подбором чисел зубьев соответствующих колес мойшо получить требу мый угол качения барабанов в одну сторону - . В течение угла поворота ft генератора 23 против часовой стрелки происходит холостая перегонка гофра а роликами по дискам 25. При этом соблюдается условие (4 и (3). Колесо 26 не может быть повернуто со стороны конического колеса 40 дифференциала 35 по той же причине, что и для волновой передачи 14. В это же время происходит вращение генератора волн I6 волновой передачи 14 против часовой стрелки (фиг.1 и 3) с той же угловой частот Причем ролик С (фиг.З), войдя в .со прикосновение с гибкой связью 21 образует гофр а Такой же гофр а постепенно исчезает в районе противоположного ролика, что сопровождается поворотом ведомого подвижного колеса 19 по часовой стрел ке на угол 02 1 Одновременно вращение вала 20 ко леса 19 и конического колеса 39, ус
tti
,nioc д,|ос
. Л - . У- Y, /., vT
I Jll . J llmUIUIIIIIIII mull 11. X. .---,
- X :r11
irj
.i тановленного на этом валу, вызывает вращение сателлитов 36 и обкат их по неподвижному колесу 40 с вращением корпуса 37 дифференциала тоже по чаг совой стрелке. Зубчатый венец 33 корпуса дифференциала через зубчатые колеса 41 и 42, муфты 45 и 47 и планетарные дифференциальные передачи поворачивает барабаны 3 и 4 против часовой стрелки на угол .i v . .. J (iii ПАП Таким образом, за время поворота шестерни 31 (ротора электродвигателя 1) на угол , ф1канатные барабаны совершают автоматическое возвратно-вращательное движение в пределах заданного угла ± f . Затем цикл повторяется, т,е. непрерывное равномерное вращение электродвигателя I привода сопровождается возвратно-вращательным движением барабанов 3 и 4, которые посредством канатов 49 и 50 обеспечивают возвратно-поступательное движение резания пилы 8 со скоростью 1VP и необходимь{м ходом S (фиг.2) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм подачи горной машины | 1983 |
|
SU1094961A1 |
| Волновая дифференциальная передача | 1990 |
|
SU1722910A1 |
| ПЛАВУЧАЯ ПРИБРЕЖНАЯ ГИДРОВОЛНОВАЯ ЭЛЕКТРОСТАНЦИЯ | 2014 |
|
RU2626188C2 |
| Привод канатно-цепных пил | 1985 |
|
SU1326732A1 |
| Привод шпинделя для вибрационного резания | 1980 |
|
SU933293A1 |
| СПОСОБ УПРАВЛЕНИЯ ГУСЕНИЧНОЙ МАШИНОЙ | 2024 |
|
RU2835218C1 |
| Механизм подачи канатно-цепной пилы | 1980 |
|
SU935613A1 |
| Привод для преобразования непрерывного вращательного движения в импульсивное вращение | 1989 |
|
SU1664672A2 |
| Товарный регулятор ткацкого станка | 1989 |
|
SU1648999A1 |
| Бесступенчатая коробка передач | 2023 |
|
RU2806843C1 |

ПРИВОД КАНАТНО-УГОЛЬНОЙ ПИЛЫ, включающий редуктор режущей части с механизмом реверсирования параллельно расположенных между собой барабанов, в каждом из которых расположены дифференциальные планетарные зубчатые передачи, имеющие водила и солнечные шестерни, и механизм подачи, кинематически связанный с солнечными шестернями, отличающийся тем, что, с целью снижения металлоемкости и динамических нагрузок, редуктор режущей части с механизмом реверсирования вьтолнен в виде двух волновых несоосных зубчатых передач гибкой связи, состоящих из многороликовых генераторов волн с валами, трехзвенной конической передачи с ведомыми жесткими колесами и валами, установленными с возможностью встречного вращения, и конического дифференциала, корпус которого снабжен зубчатым венцом, находящимся в постоянном зацеплении с двумя шестерня.чи, установленными на валах, сопряженных посредством муфт с водилами дифференциальных планетарных (Л зубчатых передач барабанов, при этом валы многороликовых генераторов волн связаны между собой и с электродвигателем трехзвенной конической зубчатой передачей, а валы ведомых жестких колес соединены друг с другом коническим дифференциалом. со ел 
| Лвторское свидетельство СССР 924368, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Привод канатно-цепной пилы | 1978 |
|
SU773260A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
