1
Изобретение относится к автоматике и измерительной технике и может быть использовано для измерения координат объектов или отверстий..
Известен оптико-электронный профилоскоп, содержащий электронно-лучевую трубку, оптическую систему, фотоприемник, которое позволяет контролировать профиль объекта D-l.
Однако точность его при измерении координат объектов недостаточна, так как полезный сигнал обратной связи на выходе фотоприемника пропорцио нален отклонению от профиля, а не от координат объекта.
Наиболее близким к изобретению .является устройство для определения координат объектов,содержащее установленные последовательно, электронно-лучевую трубку, оптическую систему и фотоприемник, схему обработки сигналов фотоприемника, состоящую из двух идентичных каналов, блок развертки и сумматор, подключенный к отклоняющей системе электроннолучевой трубки Г2 .
Недостатком известного устройства является невысокая точность измере- . ния координат.
Цель изобретения - повышение точности измерения координат объектов.
Поставленная, цель достигается тем, что устройство снабжено дополнительным сумматором, соединенным с отклоняющей системой электронно-лучевой трубки, каждый из каналов схеtJia обработки сигналов фотоприемника выполнен в виде соединенных последоtoвательно множительного блока и фильтра, а блок развертки содержит управляеьме генераторы вертикальной и горизонтальной развертки, первые выходы генераторов развертки подключены к соответствующим сумматорам и BTOptiM входам множительных блоков, вторые выходы генераторов развертки подключены к вторым входам сумматоров, а выходы каждого из фильтров соединены
20 с третьими входами соответствующего сумматора.
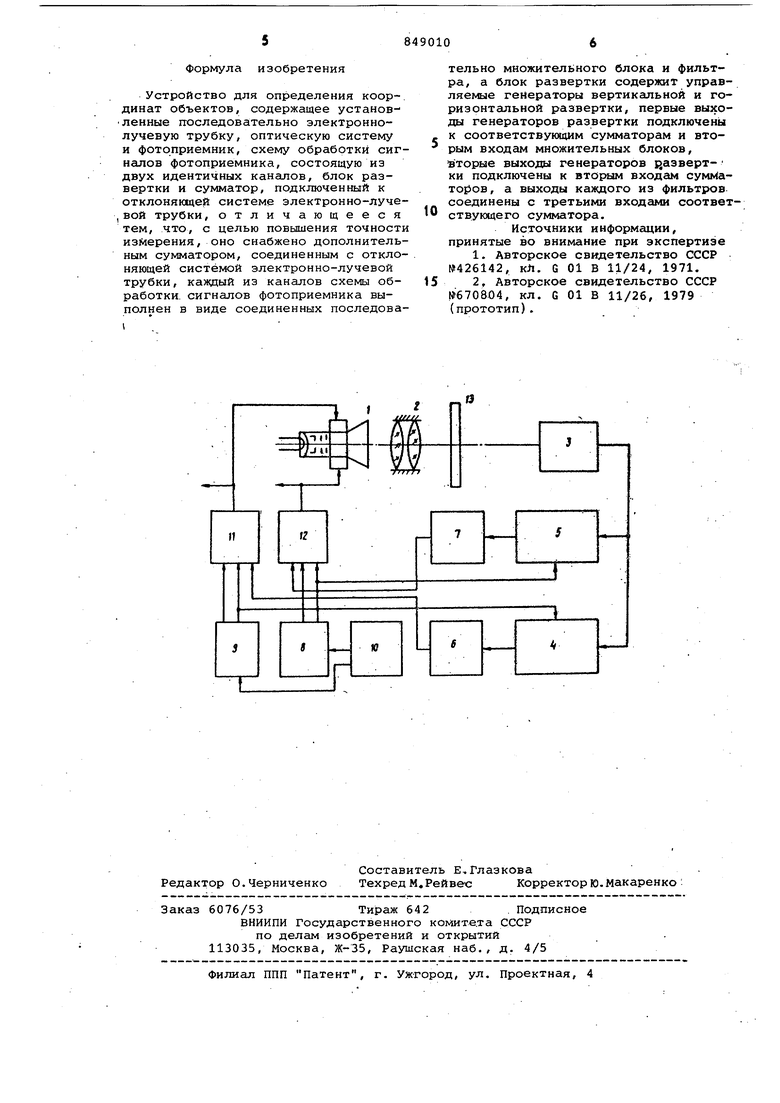
На чертеже дана блок-схема предлагаекгого устройства.
Устройство состоит из электронно25лучевой трубки 1, оптической системы 2, фотоприемника 3, схеки обработки сигналов фотоприемиика 3, содержащей множительные блоки 4 и 5, фильтры 6 и 7, генераторы 8 и 9 вер30тикальной и горизонтальной развертки, программного блока 10, суммато-- ров 11 и 12. Устройство работает следующим образом. По команде с программного блока 10 генератор 9 горизонтальной и генератор 8 вертикальной разверток фор мируют постоянные и .переменные напряжения, определяющие траекторию пятна наэлектронно-лучевой трубке 1 Например, если объект 13 - круглое отверстие, то постоянные напряжения пропорциональны предлагаемым координатам центра отверстия, а переменные составляющие изменяются по синусоидальному закону. Поэтому световое пятно на экране электронной трубки 1 сканирует по окружности радиуса R Коэффициент передачи 2Ко оптической CHCTeNttj таков, что изображение сканирующего пятна перемещается по окружности, радиус которой равен радиусу отверстия, т.е. R Кс)К .(1 ) Если центр.траектории совмещен с центром , то на выходе фото приемника 3 только постоянная состав ляющая сигнала. Если .центр траектории не совпадае с центром отверстия, то при. малых смещениях на выходе фотоприемника 3 присутствует сигнал вида it)K;ipcosCuy -t- cp)-no(t), (а) где К - коэффициент усиления оптико-электрочного тракта р - величина смещения объекта относительно начально .выставки центра траектории движения пятна; о - частота сканирования; Cf - направление смещения объ екта; п-.(с) - шум оптико-электронного тракта, включающий шум фотоприемника, который можно считать белым (в . наибольшей степени посл нее справедливо для фотоэлектронного умножите . ля ; . t - время Если с выхода по переменному току генератора 9 горизонтальной развертки на второй вход множительного бло ка 4 поступает напряжение UgN(t) - U COSOUQt, (3) на выходе этого множительного блока 4 напряжение, равно Ujj(t) « 1р COS( t +4) xCOSUjQ t + U-1 nQ( t)cpSU)j,t Если учесть, что cosClAiot + ) cos Ч созшо t - sin.if-sinujo t ( апряжение на выходе множительного лока 4 записывается в виде / U(t) 0,5К К и ЯС05Ч -0,5 К.f COS COS2 uU(jt,5(.WgЬ 0 yit}c 05(Vgt.(i6} десь f CDS/ gx у(7) ,гдеgx -смещеие центра объекта 13 с центром трактории движения. Фильтр 6 выделяет медленно менящуюся составляющую, которой соотетствует первое слагаемое s уравении (6) и значительно подавляет стальные высокочастотные составляюие . Поэтому напряжение на выходе ильтра б пропорционально смещению6/ Q.5KiK4.Kt,ex. (8) Выходное напряжение фильтра на сумматоре 11 складывается с постоянной составлягацей генератора 9 горизонтальной развертки Ug. Тогда на выходе сумматора 11 постоянная составляющая развертки определяется суммой и Ug+ О, где €х хд- Хс, 0 координата центра объекта Хр - координата центра траектории сканиройания. Постоянное напряжение с генератора 9 горизонтальной развертки Ug определяет начальное смещение.центра траектории движения пятна Хц , где Кр - крутизна горизонтальной раз вертки. Текущая координата центра траектории определяется выражением Хо KoKгU „ , 0,5 .Kt.U-iXo r a5lt K4H цKrVCo (,9Кг1с Ко) При малых ц и большом коэффициенте усиления фильтра б (например, когда в фильуре имеется интегратор) постоянная составлягацая на выходе сумматора 11 определяется в виде ( Из этого выражения видно, что сред няя составляющая напряжения на выходе cyMvi Topa 11 пропорциональна координате объекта 13 и на точность контроля в основном влияет нестабильность крутизны развертки, т.е. коэффициент Кг. Аналогично работает канал по вертикальной развертке.
Формула изобретения
Устройство для определения координат объектов, содержащее установленные последовательно электроннолучевую трубку, оптическую систему и фотоприемник, схему обработки сигналов фотоприемника, состоящую из двух идентичных каналов, блок развертки и сумматор, подключенный к отклонякще системе электронно-луче,вой трубки, отличающееся тем, что, с целью повышения точности измерения, оно снабжено дополнительным сумматором, соединенным с отклоняющей системой электронно-лучевой трубки, каждый из каналов схемы обработки, сигналов фотоприемника выполнен в виде соединенных последовательно множительного блока и фильтра, а блок развертки содержит управляемые генераторы вертикальной и горизонтальной развертки, первые выходы генераторов развертки подключены к соответствующим сумматорам и вторым входам множительных блоков, вторые выходы генераторов jjasaepx- ки подключены к вторым входам суммаTOJ5OB, а выходы каждого из фильтров соединены с третьими входами соответ0ствующего сумматора.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР ГР426142, кЛ. G 01 В 11/24, 1971.
5
2,Авторское свидетельство СССР №670804, кл. G 01 В 11/26, 1979 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Оптико-электронный пеленгатор | 1990 |
|
SU1802348A1 |
| Высотомер-автомат | 1987 |
|
SU1509591A1 |
| ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ РЕШЕНИЯ СИММЕТРИЧНОЙ ЗАДАЧИ О КОМЛ^ИВОЯЖЕРЕ | 1972 |
|
SU331406A1 |
| Автоколлиматор | 1976 |
|
SU670804A2 |
| Устройство для стабилизации экспозиции светового пятна на экране электронно-лучевой трубки | 1981 |
|
SU1083408A1 |
| ГОЛОГРАФИЧЕСКОЕ ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО | 1990 |
|
SU1813298A3 |
| ДИНАМИЧЕСКИЙ ОПТИЧЕСКИЙ КОРРЕЛЯТОР | 1991 |
|
RU2022326C1 |
| Устройство управления электроннолучевым нагревом | 1979 |
|
SU837251A1 |
| ИЗМЕРИТЕЛЬ ПОПЕРЕЧНЫХ РАЗМЕРОВ ЧАСТИЦ ТИПА ВОЛОКОН | 1992 |
|
RU2064661C1 |
| Антропометр | 1990 |
|
SU1799264A3 |
