(Л
ел
о со
СП
;о
31509
пути 6, интегратор пути 17, опорньй генератор 18, счетчик превьшгений 19. Все устройство расположено на подвиж ной платформе. Измерение углового положения прибора относительно задаваемой маятником местной вертикали осуществляется совокупностью расположенных на одной оптической оси электронно-лучевой трубки 12, светоделите-
ли 6, формирующего-объектива 5, в плоскости изображения которого расположен маятник 1 с отражающим элементом 4, а также расположенные на другой оптической оси по разную сторону от светоделителя 6 и оптически связанные с ним два фотоприемника 8, 11 со своими оптическими система ми 7, 9. 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоколлиматор | 1978 |
|
SU805062A1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2292566C1 |
| Устройство для определения углов наклона подвижного объекта | 1988 |
|
SU1569544A1 |
| СПОСОБ ДОСТАВКИ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2541505C2 |
| Устройство для стабилизации экспозиции светового пятна на экране электронно-лучевой трубки | 1981 |
|
SU1083408A1 |
| Способ нивелирования и устройство для его осуществления | 1986 |
|
SU1506274A1 |
| СПОСОБ ВИЗУАЛИЗАЦИИ МИКРОКОНТРАСТНЫХ ОБЪЕКТОВ И ОПТИЧЕСКИЙ ПОЛЯРИЗАЦИОННЫЙ НАНОСКОП ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2029976C1 |
| Устройство регистрации электрических сигналов на фотопленке | 1983 |
|
SU1173188A1 |
| Устройство для контроля прямолинейности рельсовых путей | 1988 |
|
SU1576616A1 |
| Способ электрического репродуцирования цветных изображений и устройство для его осуществления (его варианты) | 1981 |
|
SU1248076A1 |
Изобретение относится к инженерной геодезии, в частности к автоматизации измерений превышений точек местности. Цель изобретения - повышение точности измерений. Высотомер-автомат содержит маятниковую систему 1 с демпфирующими блоками 2,3, отражающий элемент 4, укрепленный на конце маятника 1, оптико-электронную систему измерения углового положения маятника, электронно-лучевую трубку 12, блок развертки 13, блок 14 формирования опорной координаты, датчик 15 угла наклона платформы, датчик пути 16, интегратор пути 17, опорный генератор 18, счетчик превышений 19. Все устройство расположено на подвижной платформе. Измерение углового положения прибора относительно задаваемой маятником местной вертикали осуществляется совокупностью расположенных на одной оптической оси электронно-лучевой трубки 12, светоделителя 6, формирующего объектива 5, в плоскости изображения которого расположен маятник 1 с отражающим элементом 4, а также расположенные на другой оптической оси по разную сторону от светоделителя 6 и оптически связанные с ним два фотоприемника 8,11 со своими оптическими системами 7,9. 1 ил.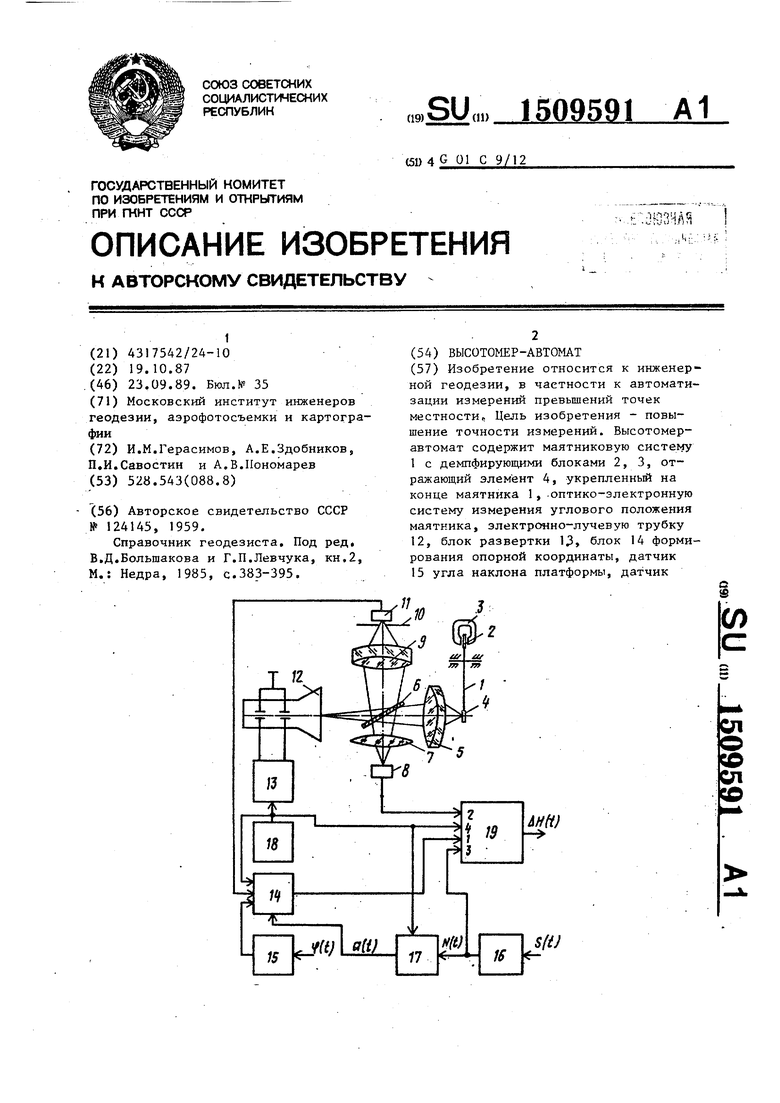
Изобретение относится к инженерной геодезии и может быть использовано при автоматизированном измерении взаимных превышений точек местности в составе подвижных средств.
Цель изобретения - повышение точности измерений.
На чертеже представлена структурная схема высотомера.
Высотомер содержит маятник 1 с пластиной 2 демпфирования, которая перемещается в зазоре магнита 3, отражающая марка 4, например зеркало, закрепленное на конце маятника 1, формирующий- объектив 5, светоделитель 6, например полупрозрачное зеркало, коллектив 7, собирающий лучи на первьй фотоприемник 8, фокусирующий объектив 9, диафрагму 10, второй позици- онно-чувствительньй фотоприемник 11, электронно-лучевую трубку 12, блок 1.3 развертки, блок 14 формирования опорной координаты, датчик 15 угла наклона платформы, датчик 16 пути, интегратор 17 пути, опорньш генератор 18, счетчик 19 превьшений. Все устройство расположено на подвижной плат форме (не показана), ч
Устройство работает следующим образом. . .
С помощью маятника 1 в устройстве обеспечивается формирование местной вертикали относительно корпуса прибора и соответственно относительно платформы подвижного средства, на кото- рой расположен высотомер. При накло- не платформы за счет наклона местности маятник 1 также отклоняется на тот же угол относительно нулевого положения, С помощью блока 13 раз- вертки на экране ЭЛТ 12 формируется световое пятно, перемещающееся по дуге окружности, эквивалентньй центр которой совпадает с осью вращения
маятника 1, Круговая развертка светового пятна может быть обеспечена известными способами, например с помощью двух синусоидальных напряжений, подаваемых на X, У пластины ЭЛТ 12 и сдвинутых по фазе на 12.
Сфокусированное изображение светового пятна на экране ЭЛТ 12 формируется в плоскости изображения формирующегося объектива 5. Плоскость вращения маятника 1 с размещенным на его конце отражающим элементом (зеркалом) 4 совпадает с .плоскостью изображения объектива 5. Для .обеспечения высокой точности измерений линейные размеры зеркала 4 согласованы с размерами изображения сфокусированного пятна ЭЛТ 12,
При пересечении световым пятном зеркала 4 световые лучи от него отражаются в объектив 5 и через светоделитель 6, коллектив 7 попадают на светочувствительную поверхность фотоприемника 8, например ФЗУ. В момент прохождения бегущего светового пятна через зеркало 4 на выходе фотоприемника 8 формируется электрический импульс, которьй подается на второй вход счетчика 19 превышений.
С помощью другого фотоприемника 11 с расположенными перед ним объективом 9 и диафрагмой 10 формируется импульс соответствующий нулевому положению угла отклонения маятника 1. Диафрагма 10 расположена так, что при отсутствии наклона местности (угол наклона маятника 1 о 0) импульсы, сформированные фотоприемниками 8 и 11 совпадают во времени. При об т О и заданной угловой скорости.перемещения бегущего пятна на экране ЭЛТ 12 временной сдвиг между импульсами фотоприемников 8 и 11 пропорционален углу отклонения маятника 1,
Af- - L г CO
где CO -. угловая скорость светового пятна.
В качестве интегратора пути мож быть использован, например, измери тель периода следования импульсов, осуществляющих измерение двух сосе
При равномерном движении подвижного периодов следования, выделения их
10
средства a(t) О и отсутствии перекоса платформы относительно колесных
пар ((0) опорный импульс нулевого
положения проходит без временных
задержек через блок 14 формирования
опорной координаты поступает на первый вход счетчика 19 превьшений. На
третий вход счетчика 19 превышений
поступают импульсы с датчика 16 пути,
а на четвертый вход синхронизирующие
импульсы высокой частоты от опорного
стабильного генератора 18, например
кварцевого. В счетчике 19 превышений
известными способами с помощью цифро- 20 ной 3, которая движется в магнитном
вых счетчиков и других логических схем поле постоянного магнита 2.
обеспечивается формирование выходного При наклоне платформы, на которой
размещен высотомер, с помощью преобразователя угол - код датчика 15 на- 25
разности и запоминания этой разности в выходном регистре.о Этот код поступ ет в блок 14 опорной координаты, где с помощью соответствующих цифровых схем вызьшается временной сдвиг опор ного импульса от фотоприемника 11 на величину, пропорциональную углу отклонения маятника 1 за счет ускоре ния , и знака, совпадающего со знако дополнительного отклонения маятника 1. Различные удары и толчки платформы компенсируются демпфирующей систе мой маятника 1 - демпфирующей пласти
цифрового сигнала, пропорционального текущему превьшению местности относительно предыдущей опорной точки по закону
U.H Zluoi; uS; ,
.
где uoi; - величина угла наклона местности на элементарном i-м участке пути;
US j - величина элементарного участка пути.
Опорньй генератор 1В обеспечивает синхронизацию работы основных узлов высотомера: блока 13 развертки, блока формирования опорной координаты и интегратора 17 пути.
Датчик 16 пути располагается на оси вращения колеса подвижного средства либо механически связывается с ней через соответствующую кинематическую передачу. При равноускоренном движении подвижного средства маятник 1 отклоняется на дополнительный угол Лйбза счет действия сил инерции, С помощью интегратора 17 пути из числа импульсного кода пути формируется цифровой код, пропорциональньй величине продольного ускорения подвижной флатформы
30
клона платформы осуществляется формирование кода, которьш также, как и код с выхода блока 17, вызывает смеще ние во времени опорного импульсе формируемого в блоке 14 опорной координаты на время, пропорциональное углу наклона платформы, относительно колесных пар и со знаком, противоположным дoпoлнитeльнo y углу смещения маятниками, oi.,
Таким образом, блок 14 опорной координаты осуществляет функцию управляемой временной задержки импуль са нулевого положения маятника и компенсирует электронным образом вли- дп яние продольных ускорений, возникающих при разгоне и торможении подвижного средства, и также кo meнcиpyeтcя влияние наклонов платформы относитель но колес на точность измерения превышений .
35
45
Формула изобретения
Высотомер-автомат, содержащий ма- CQ ятниковую систему с магнитным демпфером, расположенную на платформе, датчик пути, опорньй генератор и счетчик превышений, отличающий- с я тем, что, с целью повышения точ- сс кости, он снабжен расположенными на одной оптической оси электронно-луЧе- вой:трубкой с блоком развертки, светоделителем, формирующим обьекти- вом, оптической отражающей маркой.
N К-а
-.5Ltl dt
где К - коэффициент пропорциональ-
ности;
а - величина продольного уско ре- ния.
15095916
В качестве интегратора пути может быть использован, например, измеритель периода следования импульсов, осуществляющих измерение двух соседних
0
разности и запоминания этой разности в выходном регистре.о Этот код поступа ет в блок 14 опорной координаты, где с помощью соответствующих цифровых схем вызьшается временной сдвиг опор- ного импульса от фотоприемника 11 на величину, пропорциональную углу отклонения маятника 1 за счет ускорения , и знака, совпадающего со знаком дополнительного отклонения маятника 1. Различные удары и толчки платформы компенсируются демпфирующей системой маятника 1 - демпфирующей пластиразмещен высотомер, с помощью преобразователя угол - код датчика 15 на-
клона платформы осуществляется формирование кода, которьш также, как и код с выхода блока 17, вызывает смеще ние во времени опорного импульсе формируемого в блоке 14 опорной координаты на время, пропорциональное углу наклона платформы, относительно колесных пар и со знаком, противоположным дoпoлнитeльнo y углу смещения маятниками, oi.,
Таким образом, блок 14 опорной координаты осуществляет функцию управляемой временной задержки импульса нулевого положения маятника и компенсирует электронным образом вли- яние продольных ускорений, возникающих при разгоне и торможении подвижного средства, и также кo meнcиpyeтcя влияние наклонов платформы относительно колес на точность измерения превышений .
Формула изобретения
Высотомер-автомат, содержащий ма- ятниковую систему с магнитным демпфером, расположенную на платформе, датчик пути, опорньй генератор и счетчик превышений, отличающий- с я тем, что, с целью повышения точ- кости, он снабжен расположенными на одной оптической оси электронно-луЧе- вой:трубкой с блоком развертки, светоделителем, формирующим обьекти- вом, оптической отражающей маркой.
715095918
на маятнике, расположенными на другойвторым входом с-опорным генератором, оптической оси и оптически связанныетретьим входом с датчиком наклона со светоделителем, первым фотоприём-платформы, четвертым входом с инте- ником с коллективом, вторым позици-гратором пути, который связан с опор- онно-чувствительным фотоприемникомньм генератором и датчиком пути, с фокусирующим объективом и диафраг-счетчик превьшений связан первым вхо- мой, а также блоком формированиядом с выходом блока опорной координа- опорной координаты, датчиком наклонаты, вторым входом с первым фотоприем- платформы и интегратором пути, блок дником, третьим входом с датчиком пути, формирования опорной координаты связанчетвертым входом с опорным генератором первым входом с вторым фотоприемником,который связан с блоком развертки.
| Прибор для автоматического нивелирования местности | 1956 |
|
SU124145A2 |
| Справочник геодезиста | |||
| Под ред | |||
| В.Д.Большакова и Г.П.Левчука, кн.2, М.: Недра, 1985, с.383-395. | |||
