Изобретение относится к оптико-элект- роннь м устройствам пеленгации и может быть ь пользовано в устройствах обнаружения определения координат целей в оптиче- ском диапазоне длин волн.
Цоль изобретения - повышение точности и мерения угловых координат цели за счет определения положения цели в пределах иирины диаграммы направленности приемного канала инфракрасного излучения. :
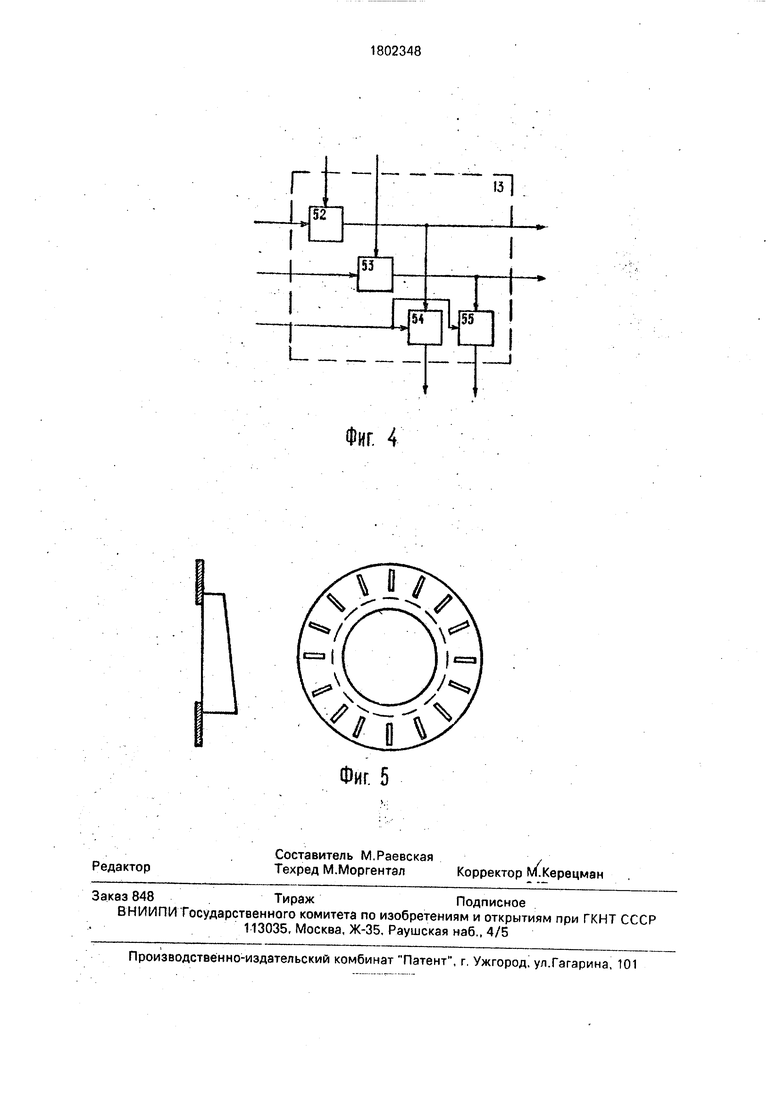
На фиг. 1 приведена функциональная схема |оптико-электронного пеленгатора; на фиг. 2:- функциональная схема оптико-механического сканирующего устройства; на фиг. 3 - функциональная схема фотоприемного устройства; на фиг. 4 - функциональная схема рлока формирования координат цели; на фиг. 5 - внешний вид первого оптического клина с механическим модулятором, где
обозначено: 1-фотоприемное устройство; 2
- оптико-механическое сканирующее устройство; 3 -двигатель; 4 - первый редуктор; 5 - второй редуктор; 6 - первый генератор опорного напряжения; 7 - второй генератор опорного напряжения; 8 - фокусирующее зеркало; 9 - генератор развертки; 10 - электронно-лучевой индикатор; 11 - лазер; 12 - светоделитель; 13 -блок формирования координат цели; 14 - первый подвижный оптический клин; 15 - второй подвижный оптический клин; 16 - механический модулятор; 17 - излучающий фотодиод; 18 - фоторезистор; 19 - переотражающее зеркало; 20 - четырехквадрантный фотоприемник; 21
- интерференционный светофильтр; 22 - тактовый генератор; 23 - первый усилитель; 24 - второй усилитель; 25 - третий усилитель; 26 - четвертый усилитель; 27 - первый аналого-цифровой преобразователь (АЦП);
00
о
ю со
00
28 - второй АЦП; 29 - третий АЦП; 30 - четвертый АЦП; 31 - первый регистр; 32 - второй регистр; 33 - третий регистр; 34 - четвертый регистр; 35 - пятый регистр; 36 - шестой регистр; 37 - первый вычитатель; 38
- второй вычитатель; 39 - третий вычитатель; 40 - первый сумматор; 41 - второй сумматор; 42 - третий сумматор; 43 - четвертый сумматор; 44 - пятый сумматор; 45
-первый цифро-аналоговый преобразователь (ЦАП); 46 - второй ЦАП; 47 - первый делитель; 48 - второй делитель; 49 - схема сравнения кодов; 501 - формирователь начального кода; 51 - дифференцирующая цепь; 52 - шестой сумматор; 53 - седьмой сумматор; 54 - первая схема совпадения; 55
-вторая схема совпадения.
Оптико-электронный пеленгатор работает следующим образом.
Непрерывное излучение лазера 11 последовательно проходит через светоделитель 12, первый оптический вход-выход оптико-механического сканирующего устройства 2, переотражающее зеркало 19, фокусирующее зеркало 8, второй 15 и первый 14 оптические подвижные клинья и через второй оптический вход-выход оптико-механического сканирующего устройства 2 передается в пространство.
Идентичные первый 14 и второй 15 оптические подвижные клинья вращаются в одном направлении с частотами wi и ш z, соответственно, и создает розеточную траекторию лазерного луча. Так как клинья не- ссиметричны относительно оси вращения, они должны быть механически сбалансированы специально подобранной оправой. Первый 14 и второй 15 оптические клинья через первый 4 и второй 5 редукторы механически связаны с первым б и вторым 7 генераторами опорных напряжений, которые представляют собой синусо-косинус- ные потенциометры, вырабатывающие напряжения UsjnotitM Ucos am, Usin (Oiiw Ucos соответственно. Эти напряжения через первый и второй выходы оптико-меха - нического сканирующего устройства 2 подаются на первый и второй входы блока 9 генератора разверток, где складываются и подаются на четвертый и пятый входы блока 13 формирования координат цели в виде;
ихл ш U(cos «011 + cos ш 2t)
U(sln + slri )(1) где УХЛ. Uyn - координаты х, у оси луча лазера.
На первом оптическом клине 14 жестко закреплен механический модулятор, пред- ставляющий собой непрозрачный диск с на- резанными в нем щелями (фиг. 5).
Непрерывное излучение светодиода 17, пройдя через модулирующие щели вращающегося механического модулятора 16, попадает на фоторезистор 18, с выхода которого импульсное напряжение через третий выход оптико-механического сканирующего устройства 2 поступают на электрический вход фотоприемного устройства 1.
При наличии цели в области сканирования отраженное от нее лазерное излучение в виде импульса (так как луч лазера скользнул по цели) через второй оптический вход- выход оптико-механического сканирующего устройства 2, первый и 14 и второй 15 оптические подвижные клинья, фокусирующее зеркало 8, переотражающее зеркало 19, светоделитель 12, интерференционный светофильтр 21 фотоприемного устройства 1 попадает на четырехквадрантный фотоприемник, на первом, втором, третьем и четвертом выходах которого формируются импульсы напряжения, усиливаемые первым 23, вторым 24, третьим 25 и четвертым 26 усилителями и поступающие на первые входы первого 27, второго 28, третьего 29 и четвертого 30 аналого-цифровых преобразователей, на вторые входы которых подается импульсное напряжение с выхода тактового генератора 22. Частота тактового генератора 22 подбирается такой, чтобы обеспечить многократное временное квантование импульса от цели. С выходов первого 27, второго 28, третьего 29 и четвертого 30 аналого-цифровых преобразователей сигналы в виде двоичного кода подаются на входы, соответственно, первого 31, второго 32, третьего 33 и четвертого 34 регистров, в которых запоминаются при наличии на их вторых входах импульса от тактового генератора 22 и на их третьих входах импульса стробирования, поступающего на электрический вход фотоприемного устройства 1 с третьего выхода оптико-механического сканирующего устройства 2. -Сигналы с выходов первого 31 и второго 32 регистров поступают на первые входы первого 37 и второго 38 вычитающих устройств и на первые входы первого 40 и второго 41 сумматоров, а с выходов третьего 33 и четвертого 31 регистров - на вторые входы первого 37 и второго 38 вычитающих устройств и на вторые входы первого 41 и второго 41 сумматоров, На выходах первого 37 и второго 38 вычитающих устройств формируются, соответственно, сигналы Aui (ui-из) и Ди (U2-U4), а на выходах первого 40 и второго 41 сумматоров - соответственно, сигналы и 1 (u2+U3J и и 2 (ui+U4) где. - ui, U2. из, U4 - сигналы с выходов, соответственно, jriepeoro 31, второго 32, третьего 33 и четвер0
5
0
5
0
5
0
5
0
5
ioro 34 регистров. Сигналы с выходов пер- його 37 и второго 38 вычитающих устройств поступают, соответственно, на первый и Ё торой входы третьего 39 вычитающего устройства, на выходе которого формируется сигнал, пропорциональный у - координате г сложения изображения цели на поверхности четырехквадрантного фотоприемника 20: j Uyy( Ди1-Ди2);
Uyy (U1+U4(U2+U3)(2)
Одновременно, сигналы с выходов пер- ого 37 и второго 38 вычитающих устройст- поступаЧот, соответственно, на первый и орой входы третьего 42 сумматоров, на .ходе которого формируется сигнал, пропорциональный х - координате положения изображения цели на поверхности четырех- крадрантного фотоприемника 20: j иху (Aut + Д U2):
j Uxy (U1+U2) - (U3+U4).(3)
I Сигналы с выходов первого и второго 41 сумматоров, подаются, соответственно, на первый и второй входы четвертого 43 сум- м|атора, выходной сигнал которого представляет собой сумму сигналов ц и1+и2+из+и/|. Суммарный сигнал и подает- си на первые входы первого 47 и второго 48 дэлителей, на вторые входы которых подаются, соответственно, сигналы (2)иху и (Зриуц. Нормированные на величину и выходные сигналы первого 47 и второго 48 долителей, представляющие собой двоичные коды и несущие информацию о декар- т(вых координатах ихун, иуцн положения центра тяжести изображения цели на поверхности четырехквадрантного фотоприемника 20, с помощью первого 45 и второго 40 цифро-аналоговых преобразователей преобразуются в аналоговые сигналы и че- р з первый и второй выходы фотоприемнй- Ki устройства 1, первый и второй входы б/ока 13 формирования координат цели п даются, соответственно, на первые входы шестого 52 и седьмого 52 сумматоров, на втэрые входы которых поступают напряжения (1) иХл, Пул. С выходов шестого 52 и седьмого 53 сумматоров снимаются напря- ж ния, которые через первый и второй вы- хсщы блока 13 формирования координат цели поступают на первый и второй входы разверток электронно-лучевого индикатора 10 Под действием этих напряжений луч индикатора следует за движением лазерного луча в картинной плоскости цели.
i Пятый 35 и шестой 36 регистры, пятый 44J сумматор, устройство 49 сравнения кодов, формирователь 50 начального кода и дифференцирующая цепь 51 представляют
собой цифровой обнаружитель сигнала от цели, который работает следующим образом. В исходном состоянии в пятом 35 и шестом 36 регистрах записаны нули. При 5 наличии сигнала от цели на первую группу входов пятого 44 сумматора с выхода четвертого 43 сумматора подается, отличный от нуля код, который складывается с кодом, записанным в шестой 36 регистр и резуль10 тат сложения перезаписывается в шестой 36 регистр. Причем, шестой 36 регистр, во- первых, функционирует при наличии на его установочном входе импульса стробирования, во-вторых, осуществляет перезапись
5 информации при поступлении на его синхронизирующий вход импульса с выхода так: тового генератора 22. По окончании действия импульса стробирования регистр: 36 обнуляется. Таким образом, пятый 44
0 сумматор и шестой 36 регистр выполняют операцию интегрирования импульса от цели в течение действия импульса стробирования.
В пятый 35 регистр производится за5 пись содержимого пятого 44 сумматора (результата интегрирования) по заднему фронту импульса стробирования, поступающего на его синхронизирующий вход с элек- трического входа фотоприемного
0 устройства 1. Записанный в пятом 35 регистре код сравнивается в устройстве 49 срав- нения кодов с пороговым кодом, сформированном в формирователе 50 начального кода. Если числовое значение кода
5 на первой группе входов устройства 49 сравнения кодов меньше числового значения кода на второй его группе входов, то устройство 49 сравнения кодов формирует нулевое напряжение, в противном случае 0 постоянное напряжение, отличное от нуля. Если принимается импульс от цели, то на выходе дифференцирующей цепи 51 формируется импульс обнаружения, который обнуляет пятый 35 регистр. Кроме того,.
5 сформированный импульс обнаружения через третий выход фотоприемного устройства 1 поступает на третий вход блока 13 формирования координат цели и на третий вход подсвета электронно-лучевого индика0 тора 10.
В момент поступления импульса обна1 ружения на третий вход подсвета электронно-лучевого индикатора 10 на входах шестого 52 и седьмого 52 сумматоров блока
5 13 формирования координат цели имеются в общем случае ненулевые аналоговые сигналы ихцн, иуцн которые складываются с сигналами (1) ихл, иул и уточняют положение луча электронно-лучевого индикатора 10. В результате на экране индикатора угловые
координаты цели в области обзора определяются в декартовой системе координат по положению светящейся точки.
Сформированный в фотоприемном устройстве 1 импульс обнаружения с третьего его выхода через третий вход блока 13 формирования координат цели открывает первую 54 и вторую 55 схемы совпадения, поступая на их первые входы, тем самым, через третий и четвертый выходы блока 13 формирования координат цели обеспечивается прохождение сигналов, несущих информацию о точных угловых координатах цели, на внешние потребители такой информации.
Применение изобретения позволяет повысить точность определения угловых координат цели в оптико-электронном пеленгаторе.
Формула изобретения Оптико-электронный пеленгатор, содержащий оптико-механическое сканирующее устройство, включающий в себя фокусирующее зеркало, первый и второй генераторы опорных напряжений, первый и второй редукторы и двигатель, соединенный механический через первый и второй редукторы с первым и вторым генераторами опорных напряжений соответственно, блок генератора разверток, фотоприемное устройство и электронно-лучевой индикатор, причем первый и второй выходы оптико-механического сканирующего устройства соединены с первым и вторым входами блока генератора разверток, третий выход оптико- механического сканирующего устройства сопряжен с входом фотоприемного устройства, первый выход которого соединен с первым входом электронно-лучевого индикатора, отличающийся тем, что, с целью повышения точности измерения угловых координат цели за счет определения положения цели в пределах диаграммы направленности приемного канала инфракрасного излучения, введены лазер и светоделитель, а также блок формирования координат цели, при этом фотоприемное устройство содержит последовательно установленные и оптически сопряженные интерференционный фильтр и квадрантный фотоприемник, а также тактовый генератор, последовательно соединенные первый усилитель, первый аналого-цифровой преобра- зователь, .первый регистр, первый вычитатель, третий вычитатель, первый делитель и первый цифроаналоговый преобразователь, последовательно соединенные второй усилитель, второй аналого-цифровой преобразователь, второй регистр, второй вычитатель, третий сумматор, второй
делитель, второй цифроаналоговый преобразователь, последовательно соединенные третий усилитель, третий аналого-цифровой преобразователь, третий регистр, первый
сумматор, четвертый сумматор, пятый сумматор, пятый регистр, схему сравнения кодов, дифференцирующую цепь, последовательно соединенные четвертый усилитель, четвертый аналого-цифровой
0 преобразователь, четвертый регистр, второй сумматор, а также шестой регистр, выход которого соединен с вторым входом пятого сумматора, выход которого соединен с первым входом шестого регистра, выход
5 тактового генератора соединен с вторыми входами первого, второго, третьего и четвертого аналого-цифрового преобразователей, вторыми входами первого, второго, третьего, четвертого и шестого регистров,
0 выход второго регистра соединен с вторым входом первого сумматора, выход третьего регистра соединен с вторым входом первого вычитателя, выход четвертого регистра соединен с вторым входом второго вычитателя,
5 выход первого регистра соединен с вторым входом второго сумматора, выход которого соединен с вторым входом четвертого сумматора, выход которого соединен с вторыми входами первого и второго делителей, вы0 ход первого вычитателя соединен с вторым входом третьего сумматора, выход второго вычитателя соединен с вторым входом третьего вычитателя. выход формирователя начального кода соединен с вторым входом
5 схемы сравнения кодов, выход дифференцирующей цепи соединен с вторым входом пятого регистра, выходы первой, второй, третьей и четвертой площадок квадрантного фотоприемника соединены с входами
0 первого, второго, третьего и четвертого усилителей соответственно блок формирования координат цели содержит последовательно .соединенные шестой сумматор и первую схему совпадения, последо5 вательно соединенные седьмой сумматор и вторую схему совпадения, в оптико-механическое сканирующее устройство введены оптически сопряженные первый и второй подвижные оптические клинья, располо0 женные несимметрично относительно оси вращения, соединенные механически с первым и вторым редукторами соответственно, механический модулятор, жестко закрепленный на первом оптическом подвижном
5 клине, излучающий фотодиод, оптически сопряженный через механический модулятор с фоторезистором и переотражающее зеркало, оптически сопряженное с фокусирующим зеркалом, которое выполнено неподвижным с отверстием на оптической
оси, при этом лазер оптически сопряжен через светоделитель с переотражающим зеркалом, выход фоторезистора оптико-ме- хаНического сканирующего устройства соединен с третьими входами первого, второго, третьего, четвертого, пятого и шестого регистров фотоприемного устройства, выход первого цифроаналогового преобразователя фотоприемного устройства соединен с первым входом шестого сумматора блока формирования координат цели, выход вто- pojro цифроаналогового преобразователя фбтоприемного устройства соединен с первым входом седьмого сумматора блока фор
мирования координат цели, выход дифференцирующей цепи фотоприемного устройства соединен с вторыми входами первой и второй схемы совпадения блока формирования координат цели, выходы шестого и седьмого сумматоров блока формирования координат цели соединены с вторым и третьим входами электронно-лучевого индикатора соответственно, вторые входы шестого и седьмого сумматоров блока формирования координат цели соединены с первым и вторым выходами блока генератора разверток соответственно.
Фиг 4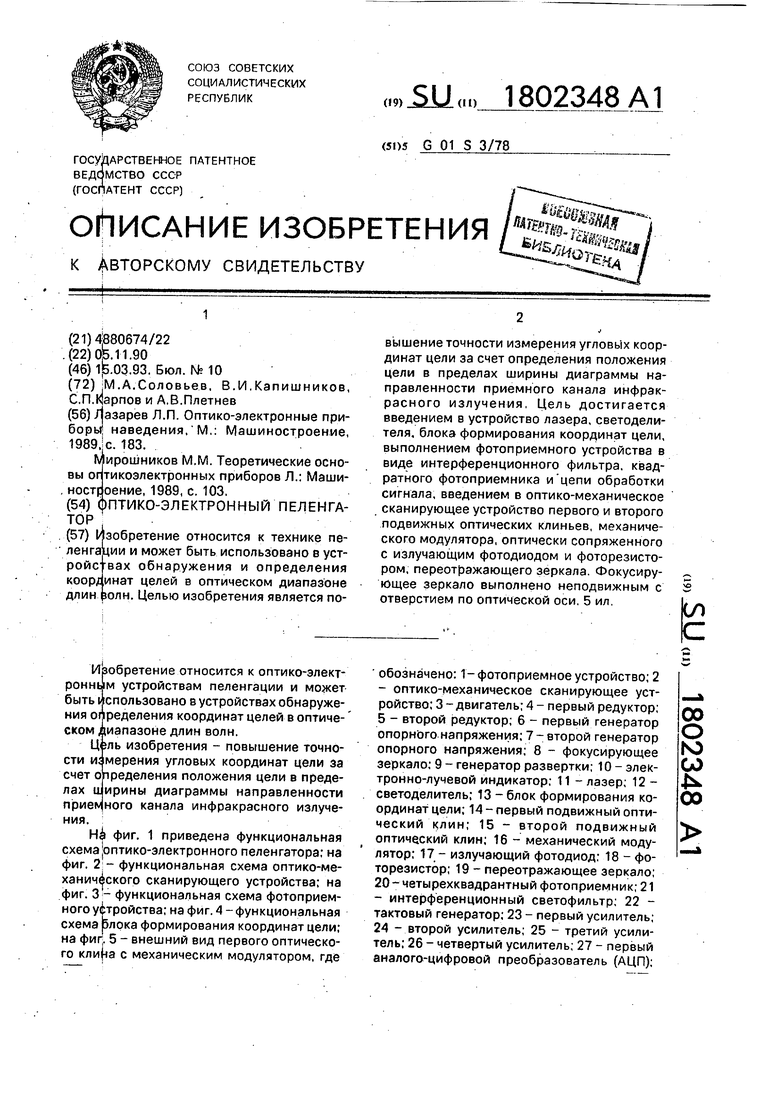



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для формирования изображения при коническом сканировании | 1989 |
|
SU1734233A1 |
| ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 1992 |
|
RU2067290C1 |
| ТЕПЛОПЕЛЕНГАТОР | 2006 |
|
RU2306577C1 |
| Устройство слежения за информационной дорожкой оптического носителя информации | 1990 |
|
SU1777172A1 |
| Следящее устройство для бесконтактного измерения параметров углового движения объекта | 1988 |
|
SU1562702A1 |
| Устройство для лазерной обработки деталей | 1989 |
|
SU1682096A1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ АВТОМОБИЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2310922C2 |
| Прецизионное сканирующее устройство | 1989 |
|
SU1714564A1 |
| СИСТЕМА АСТРООРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 1989 |
|
SU1795708A1 |
| ОПТИКО-МЕХАНИЧЕСКОЕ ЗАПОМИНАЮЩЕЕ УСТРОЙСТВО | 1989 |
|
SU1835959A1 |

I/ зобретение относится к технике пеленгации и может быть использовано в уст- обнаружения и определения координат целей в оптическом диапазоне длин юлн. Целью изобретения является повышение точности измерения угловых координат цели за счет определения положения цели в пределах ширины диаграммы направленности приемного канала инфракрасного излучения, Цель достигается введением в устройство лазера, светоделителя, блока формирования координат цели, выполнением фотоприемного устройства в виде интерференционного фильтра, квадратного фотоприемника и цепи обработки сигнала, введением в оптико-механическое сканирующее устройство первого и второго подвижных оптических клиньев, механического модулятора, оптически сопряженного с излучающим фотодиодом и фоторезистором, переотражающего зеркала. Фокусирующее зеркало выполнено неподвижным с отверстием по оптической оси. 5 ил. ел С
| /|азарев Л.П | |||
| Оптико-электронные приборы наведения, М,: Машиностроение, 1989JC | |||
| Переносная мусоросжигательная печь-снеготаялка | 1920 |
|
SU183A1 |
| IV ирошников М.М | |||
| Теоретические основы огтикоэлектронных приборов Л.: Машиностроение, 1989, с | |||
| Клапанный регулятор для паровозов | 1919 |
|
SU103A1 |
