1
Изобретение относится к пневмогидромашиностроению и может быть применено, например, в качестве привода механизированного инструмента, подъемников, лебедок и т.п.
Известна аксиально-поршневая гидромашина, содержащая корпус блока цилиндров с полднями, взаимодействующими с силовым кулачком, связанным с приводным валом, и распределительное устройство, выполненное в виде расположенных аксиально соедииен|« 1х с полостями подвода и отвода рабочего тела, взёшмодействующих с распределительным кулачком, установленным на. приводном валу соосно с силовым кулачком, золотйиков, число которих равно числупоршней 1.
Недостатком известного устройства является его значительные осевые габариты, вызыванные применяемой схемой золотникового устройства и невысокая надежность при работе на различных рабочих телах, в частности на воздухе.
Цель изобретения - уменьшение габаритов и повышение надежности при работе на различных рабочих телах.
Указанная цель достигается тем, что в каждом из золотников выполнены осевая расточка и внутренняя полость , сообщенная каналами с полостями подвода и отвода рабочего тела, при этом в полости золотника размещен запорный элемент, а в корпусе неподвижно установлен толкатель, проходящий черрз осевую расточку длл взаикюдействия с указанным запорным
. элементом.
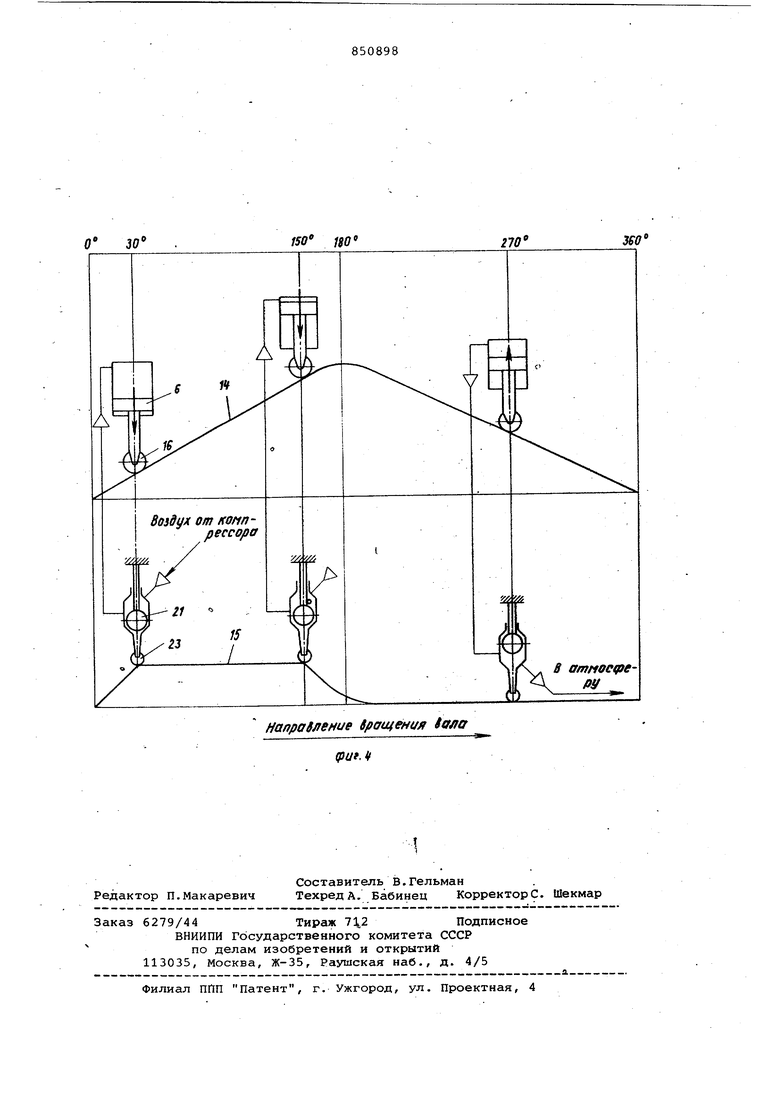
На фиг. 1 изображена аксиальнопоршневая пневмогидромашина, в разрезе; на 1«г. 2 - сечение А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. , на фиг. 4 - циклограмма рабо 5 ты, в случае использсгеання в качестве рабочего тела сжатого газа (например, сжатого, воздуха), характеризующая относительное положение поршней и элементов распределительного устройства.
Устройство и рабочий процесс пневмогидромашины рассмотрены применительно к случаю пнёвмомотора.
В корпусе 1 блока цилиндров имеются выхлопные кангшы 2, продольные каналы 3 и пазы 4, по которым осуществляется подвод рабочего тела из полости 5 подвода к поршням 6 или стравливание его через полость 7 OT-i
30 вода в атмосферу, в зависимости от
положения золотников 8. Корпус имеет переднюю крьошку 9 и заднюю крышку 10, в которой выполнены пазы 11 и кольцевая канавка 12. Внутри корпуса расположен приводной вал 13, на котором соосно установлены силовой кулачок 14, служащий для преобразования поступательного движения силовых поршней б во вращательное движение вала 13, и распределительный кулачок 15, обеспечивающий возвратно-поступательное движение золотников 8 по определенному закону. В корпусе расположены три поршня б, каждый из которых имеет ролик 16, закрепленный на оси 17, функции распределения рабочего тела осуществляют три золотника 8 (один золотник 8 обслуживает один поршень 6),каждый из которых имеет осевую расточку 18 внутреннюю полость 19, выхлопные каналы 20, запорный элемент . толкатель 22, ролик 23, ось 24, канал 25 подвода.
Аксиально-поршневой пневмодвигатель работает следующим образом.
Воздух от компрессора поступает в кольцевую канавку 12 и прижимает золотники 8 к распределительному кулачку 15. В зависимости от положения ролика 23 на профиле распределительного .кулачка 15 запорный элемент 21 находится в правом или левом крайних положениях относительно внутренней полости 19. При нахождении ролика 23 на вершине профиля распределительного кулачка 15 золотник 8 находится в правом крайнем положении и запорный элемент 21 прижат давлением воздуха к левому седлу внутренней полости 19. Воздух из кольцевой канавки 12 через внутреннюю полость 19 золотника 8, паз 4, канал 3, паз
11поступает к поряиням б. Силовой поршень бо перемещается, ролик 16 давит на силовой кулачок 14, вызывая его вращение вместе с валом 13 и i распределительным кулачком 15. в результате вращения последнего, ролик 23 золотника 8 перемещается по профилю распределительного кулачка 15 с вершины во впадину. При этом золотник 8 давлением в кольцевой канавке 12. перемещается в левое крайнее поожение, а запорный элемент 21 при- жимается к правому седлу внутренней полости 19, так как его перемещению вместе с золотником 8 в левое поожение препятствует толкатель 22. При нахождении запорного элемента 21 в правом положении прекращается оступ воздуха.из кольцевой канавки
12во внутреннюю полость 19 золотниа 8, а воздух из подпоршневого протранства по пазу 11, каналу 3, пазу 4, вьвслопным каналам 20 и 2 стравлиается в атмосферу. Профиль распреелительного кулачка 15 выполнен таим образом, что имеет переходную
зону 0-30°, зону нагнетания 30-150° переходную зону 15-180°, зону стравливания 180-360 (фиг.). Когда ролик 23 одного из воздухораспределителей находится на вершине профиля распределительного кулачка 15 (30150 ), воздух через него подается в соответствующее подпоршневое пространство. Силовой поршень 6 давит на силовой кулачок 14 и поворачивает его совместно с распределительным кулачком 15 на 120. В результате ролик 23 опускается во впадину (зона стравливания 180-360°) и воздух из подпоршневого пространства стравливается в атмосферу. Одновременно этот поворот силового и распределительного кулачков 14 и 15 прив.одит к тому-, что на вершине профиля распределительного кулачка 15 оказывается ролик 23 следующего золотника 8. Таким образом, при последовательном прохождени1р всеми тремя роликами 23 вершины профиля распределительного кулачка 15 осуществляется поворот силового кулачка 14 и вала 13 на ЗбО. Ролики 16 силовых поршней 6 движутся при рабочем ходе (когда воздух подается в подпоршнево пространство) по прямолинейной траектории 30-150°. В оставшиеся цикльа 0-30, 150-180, 180-360°силовые поршни б не создают давление на силовой, кулачок 14. Это приводит к тому, что при своей работеаксиально-поршневой. пневмомотор создает постоянный вращающий момент при условии постоянства давления подводимого сжатого аоздуха. Для осуществления реверса достаточно развернуть распределительный кулачок 15 на 180° относительно положения, показанного на фиг.2.
Указанное исполнение устройства позволяет уменьшить его габариты и повысить надежность при работе на различных рабочих телах.
Формула изобретения
Аксиально-поршневая пневмогидромашина, содержащая /корпус блока цилиндров с поршнями, взаимодействующими с силовым кулачком, связанным с приводным валом, и распределительное устройство, выполненное в виде расположенных аксиально, соединенных с полостями подвода и О1вода рабочего тела, взаимодействующих с распределительным кулачком, установленным на приводно валу соосно с силовым кулачком, золотников, число которых рав«о числу поршней, отличающаяся тем, что, с целью уменьшения габаритов и повышения надежности при работе на различных рабочих телах, в каждом из золотников выполнены осебая расточка и внутренняя полость, сообщенная ка
налами с полостями подвода и отвода рабочего тела, при этом в полости золотника размещен запорный элемент, а в корпусе неподвижно установлен толкатель, проходящий через осевую расточку для взаимодействия с указанным запорным элементом.
Источники информации, принятые во внимание при экспертизе
1. Башта Т.М. Объемные насосы и гидравлические двигатели гидросистем. М., Машиностроение, 1974, с. 255, рис. 85.


| название | год | авторы | номер документа |
|---|---|---|---|
| Паровоздушный молот простого действия | 1978 |
|
SU817142A1 |
| Пневмопривод,преимущественно для поршневого насоса | 1980 |
|
SU931950A1 |
| РЕГУЛИРУЕМЫЙ РАДИАЛЬНО-ПОРШНЕВОЙ ЭКСЦЕНТРИКОВЫЙ ГИДРОМОТОР | 1972 |
|
SU353066A1 |
| Гидравлический привод с путевым управлением | 1981 |
|
SU954645A1 |
| Устройство для изменения степени сжатия поршневого двигателя внутреннего сгорания | 1991 |
|
SU1782291A3 |
| ПНЕВМОГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫСОКОВОЛЬТНОГО | 1969 |
|
SU250247A1 |
| Распределитель потока жидкости | 1989 |
|
SU1667019A1 |
| МНОГОКАНАЛЬНЫЙ РЕЗЕРВИРОВАННЫЙ ПРИВОД И РАСПРЕДЕЛИТЕЛЬ ДЛЯ ПОДАЧИ РАБОЧЕЙ СРЕДЫ | 1995 |
|
RU2065091C1 |
| ОБЪЕМНАЯ МАШИНА | 2004 |
|
RU2267613C1 |
| СПОСОБ ПОЛУЧЕНИЯ МЕХАНИЧЕСКОЙ ЭНЕРГИИ ОТ СРАБАТЫВАНИЯ ДАВЛЕНИЯ ГАЗА И ПОРШНЕВОЙ ДЕТАНДЕР ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2814992C1 |
I I / 2V И J8 20 f (Риг. i U- П| « с . S
Направление бращения tojio
(pUf.f
