(54) УСТРОЙСТЮ ДЛЯ-ИЗМЕРЕНИЯ СКОЛЬЖЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения угла вылета ротора синхронного генератора | 1979 |
|
SU855853A1 |
| Устройство для измерения динамического измерения угла вылета ротора синхронного генератора | 1978 |
|
SU744842A1 |
| Оптический корреляционный координатор | 1973 |
|
SU443396A1 |
| УСТРОЙСТВО ЗОНДИРОВАНИЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ | 2012 |
|
RU2533311C2 |
| Преобразователь угла поворота вала в код | 1977 |
|
SU792276A1 |
| Измеритель толщины покрытия двухслойных диэлектрических материалов | 1981 |
|
SU977935A1 |
| Устройство для автоматической компенсации погрешности измерительного канала | 1989 |
|
SU1675853A1 |
| Устройство для допускового контроля переходной характеристики перестраиваемых генераторов | 1988 |
|
SU1597769A2 |
| МОДУЛЯЦИОННЫЙ РАДИОМЕТР | 2001 |
|
RU2187824C1 |
| Нулевой радиометр | 1986 |
|
SU1330588A1 |
.1 . ., Иэобр15тение относится к электротехнике и может использоваться в качестве быстродействующего измерительного органа противоаварийной автомати ки энергосистем. Иэвестно устройство для измерения скольжения.электрических машин, состоящее из импульсного датчика скорости, подключенного к входу первого .формирователя длительности импульсов, датчика напряжения источника переменного тока подключенного к входу второго формирователя длительности им,пульсов, генератора импульсов, подклю ченного к вторым входам формирователей длительности импульсов, выход г каждого из которых соединен с входом ключевого элемента,подключенного к входу сумматора через фильтр, выход которого соединен с входом усилителя постоянного тока, дополнительного фильтра, третьего ключевого эл «ента один вход которого соединен с усилителем постоянного тока, а другой вход с входом перв&го ключевого элемента; причем третий вход сумматора соединен с выходом третьего ключевого: элемент через дополнительный фильтр С Ч Недостатком известного устройства является невысокая помехоустойчивост вследствие использования для измерения скольжения сигнала в аналоговой форме. Кроме того, применение фильтров для преобразования дискрэтного сигнала в аналоговый снижает точность измерения скольжения. Наиболее близким к предлагаемому по технической сущности является устройство для измерения динамического изменения угла вылета ротора синхронного генератора и его производных, состоящее из датчика ско(5ости вращения генератора, подключенного к его выходу блока автоматического управления высокочастотного генератора импульсов, блока измерения угла вылета, соединенного с выходом блока автоматического управления и высокочастотным генератором импульсов, запоминающего блока, содержащего образцовый и сравнивакхАИй счетчики импульсов, счетные входы которых соединены с высокочастотлым генератором импульсов,а управляницие - с блоком автоматического управления, и элементы сравнения, к двум входам которого подключены выходы образцового и сравнивающего счетчиков импульсов, а его в.ыход соединен с блоком автоматического управления и с управляющим входом
сравнивающего счетчика, арифметического устройства дифференцирования, подключенного к блоку измерения угла вылета 21,
Однако в известном устройстве величину скольжения S определяют дифференцированием величины угла вылета dP ротора синхронного генератора с помощью арифметического устройства дифференцирования. При этс дифференцирование практически сводится к нахождению разнос ги между величиной полупериода , соответствующего образцовой частоте fg шин бесконечной мощности, и величиной полупериода соответствующего текущей частоте f ЭДС.синхронного генератора, т.е.
VQ-J)
где К - коэффициент пропорциональности.
Действительная же величина скольжения равна
. УУ.Т-ТО То f т т
Как видно из приведенных формул, величина скольжения S, получаемая в известном устройстве, отличается от действительной величины скольжения на - f что обуславливает наличие погрешности при измерении скольжения с помощью известного устройства.
Цель изобретения - повышение точности измерения скольжения синхронного генератора.
Поставленная цель достигается тем что устройство, содержащее датчик скорости вращения генератора, блок автоматического управления, ко входу которого подключен датчик скорости вращения генератора, высокочастотный генератор импульсов, эталонный и сравнивающий счетчики, счетные входы которых соединены с высокочастотным генератором импульсов, а управляющие - с блоком автоматического управления, введены блок деления, первый вход которого соединен с эталонным счетчиком, второй вход соединен со сравнивающим счетчиком, а третий - с блоком автоматического управления, и блок вычитания, первый вход которого подключен к блоку деления, а второй - к блоку автоматического управления.
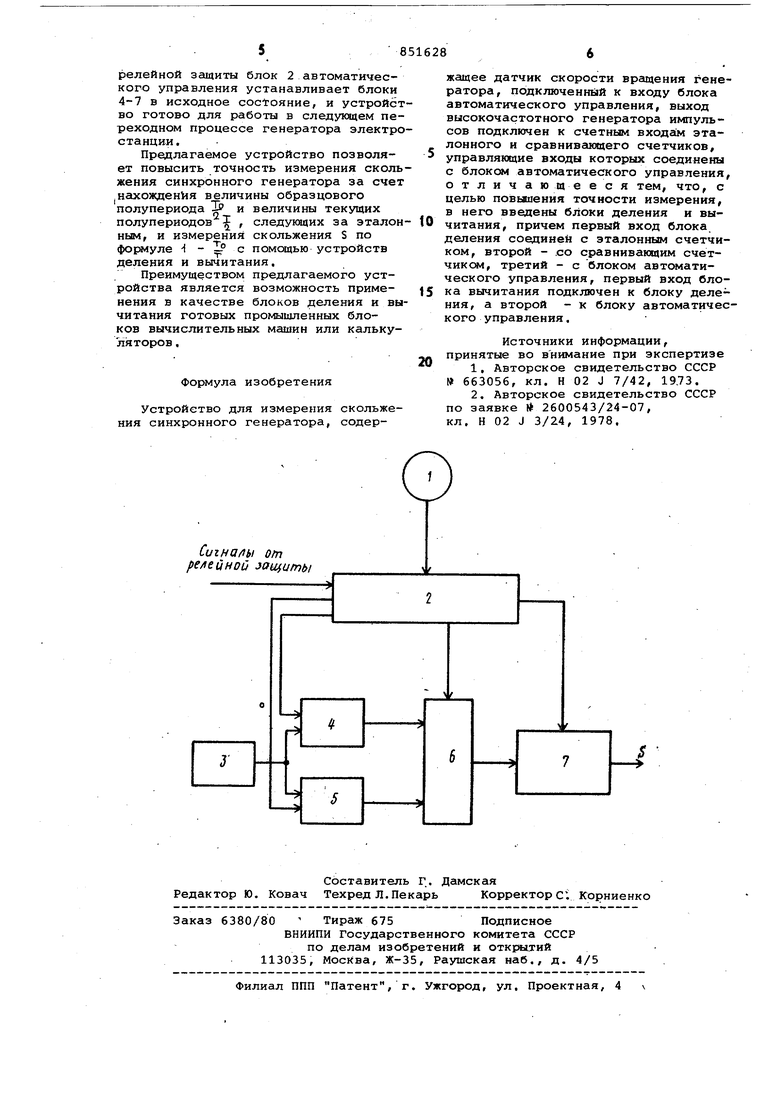
На чертеже приведена блок-схема предлагаемого устройства.
Устройство содержит датчик 1 ско-; рости вращения генератора, подключенный к его выходу блок 2 автоматического управления, высокочастотный генератор 3 импульсов, эталонный счетчик 4, служащий для измерения длительности первого целого проследовавшего после поступления сигнала от релейной защиты полупериода ЭДС генератора, принимаемого за эталонный, сравнивающий счетчик 5, служа1ЦИЙ для измерения длительности текущих полупериодов, начиная со следующего за эталонным полупериодом. Счетные входы обоих счетчиков соединены с высокочастотным генератором 3 импульсов, а управляющие - с блоком 2 автоматического управления, Устройство содержит также блок 6 деления, первый вход которого соединен с эталонным счетчиком, второй вход - со сравнивающим счетчиком 5, а третий с блоком 2 автоматического управления, IU и блок 7 вычитания, подключенный к блоку В деления,и блоку 2 автоматического управления.
Устройство работает следующим образом.
До поступления в блок 2 автоматического управления разрешающего сигнала от релейной защиты блоки 4-7 выдают нулевые сигналы.
При аварии в энергосистеме, выявляемой релейной защитой,разрешакяций сигнал от релейной защиты поступает в блок 2 автоматического управления. По окончании полупериода, во время которого произошла авария,
5 блок 2 вьодает разрешающий сигнал в эталонньй счетчик 4, который производит измерение длительности первого целого после аварии полупериода числом импульсов NO, поступающих от высокочастотного генератора 3. Величина принимается за эталонный полупериод, соответствующий частоте fo шин бесконечной мощности. Число NO сохраняется в эталонном счетчике 4 до конца переходного режима. По сигналу блока 2 автоматического управления сравнивакяций счетчик 5 измеряет и записывает длительность полупериода -s- , следующего за эталонным, числом импульсов N высокочастотного генератора 3 импульсов. По окончании измерения полупериода блок 2 автоматического управления выдает сигнал на работу блока 6 деления, в котором производится деление числа
NQ на N, что соответствует операции деления величины эталонного полупериода на величину текущего полупериода -3 . С началом работы блока 6 деления блок 2 автоматического управления производит сброс числа N в сравнивающем счетчике 5 и дает команду на измерение следующего полупериода ЭДС генератора. Сигнал с выхода блока б деления поступает на вход блока 7 вычитания,где по сигналу с блока 2 автоматического управления производится операция его вычитания из единицы. Таким образсял, на выходе блока 7 вычитания выдается величина скольжения генератора . После этого блок 2 автоматического управления подает команды на выполнение следующей операции в блок 6 деления и в блок 7 .вычитания,
После окончания переходного процесса и прихода второго сигнала от
