Известны слиповые тележки с подъемными при помощи гидравлических домкратов площадками, каждая из которых управляется индивидуально, ввиду чего они могут быть применены лишь для подъема небольших по длине судов.
В описываемой установке этот недостаток устранен тем, что все подъемные площадки нескольких слиповых тележек приводятся в движение одновременно, так как их гидравлические домкраты питаются насосами, производительность которых регулируется специальным устройством, обеспечивающим равномерную подачу жидкости во все домкраты.
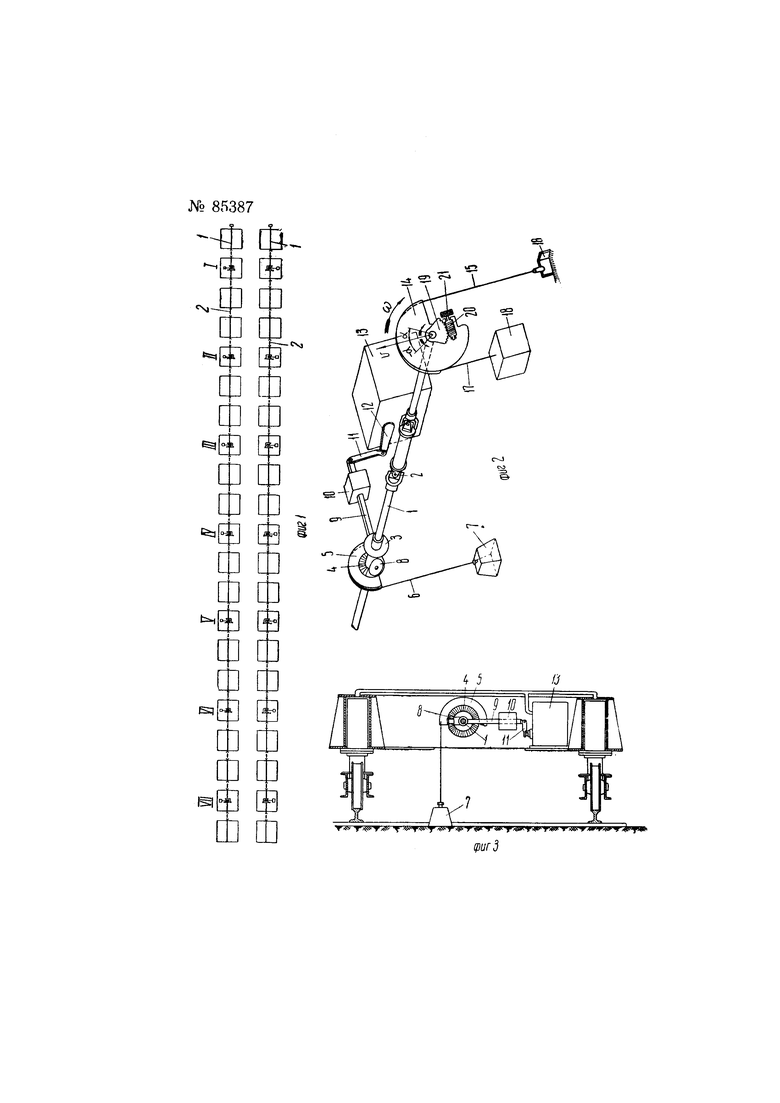
На фиг. 1 изображена схема расположения двух рядов слиповых тележек и размещения на них регулирующего устройства; на фиг. 2 изображена в перспективе схема регулирующего устройства; на фиг. 3 - показано расположение этого устройства на слиповой тележке с подъемной площадкой.
Вся система состоит из одного или двух рядов тележек.
Все тележки в каждом ряду могут быть разбиты на группы с одним регулирующим устройством для обслуживания нескольких тележек. На фиг. 1, например, все тележки разбиты на группы по три тележки в каждой группе. Каждая группа обозначена порядковой римской цифрой - I, II, III и т.д.
Регулирующее устройство, являющееся отличительной особенностью изобретения, включает в себя проходящий через тележки всех групп I, II, III и т.д. вал 1, отдельные участки которого между тележками связаны карданными сочленениями 2. На каждом групповом отрезке вала 1, обслуживающем группу тележек, смонтирован конический дифференциальный механизм, одна шестерня 3 которого жестко связана с валом 1, вторая 4 сидит на валу 1 свободно и связана с одноручейковым блоком 5, который охватывает гибкая металлическая нить 6, натянутая грузом 7. Сателлит 8 дифференциального механизма укреплен на одном плече двуплечего рычага 9, поворотного относительно вала 1. Второе плечо рычага 9 несет груз 10 и серьгой 11 связано с рычагом 12 регулятора гидравлического насоса 13.
На конечном участке вала 1 укреплен двухручейковый блок 14,-один ручей которого охватывает канат 15, прикрепленный к забитой в грунт свае 16.
Второй ручей блока 14 в обратном направлении охватывает канат 17, натянутый грузом 18.
К блоку 14 жестко прикреплен червячный сектор 19, взаимодействующий с червяком 20, поворачиваемым вручную маховиком 21.
Принцип действия регулирующего устройства основан на точном воспроизведении при движении подъемной площадки вертикального перемещения концевого участка вала всеми остальными его участками.
При вертикальном перемещении концевого участка с некоторой произвольной скоростью канат 15 будет поворачивать блок 14 по часовой стрелке (фиг. 2).
При этом все участки вала 1 будут вращаться с той же угловой скоростью вала и блока 14, так как грузы 7 опираются на грунт. С той же угловой скоростью, но в обратном направлении, будут вращаться и конические шестерни 3. При этом сателлит 8 будет вращаться только относительно своей оси.
Если подъемные площадки, а с ними и соответствующие участки вала какой-либо из групп тележек отойдут от синхронной скорости вертикального перемещения (обгонят или отстанут), то блок 5 и коническая шестерня 4 получат угловую скорость, отличную от угловой скорости вала 1 и конической шестерни 3, ввиду чего сателлит 8, помимо вращения относительно своей оси, вынужден будет повернуться также и вокруг вала 1, изменив тем самым положение рычага 9 и воздействуя через серьгу 11 на рычаг 12 регулятора своего гидравлического насоса 13. Это воздействие будет продолжаться до тех пор, пока блок 5 не начнет вращаться с той же угловой скоростью, как и блок 14, что приведет к соответствующему синхронному вертикальному перемещению площадки.
Для первоначального пуска установки необходимо вывести вал 1 из нейтрального положения, после чего все сателлиты повернутся и связанные с ними рычаги 9 переместят регуляторы своих гидравлических насосов.
Вывод вала 1 из нейтрального положения производится поворотом блока 14, осуществляемым червяком 20 через червячный сектор 19.
Угол поворота червячного сектора определяет перемещение регуляторов и, следовательно, задаваемую скорость подъема.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАКТОР | 2009 |
|
RU2401759C2 |
| АГРОПРОМЫШЛЕННЫЙ АГРЕГАТ | 2005 |
|
RU2289900C1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ОПУСКАНИЯ ШАНДОРОВ В ОТВЕРСТИЯ ГИДРОТЕХНИЧЕСКИХ СООРУЖЕНИЙ | 1934 |
|
SU46192A1 |
| ПЕРЕДАТОЧНОЕ УСТРОЙСТВО И ПРЕДНАЗНАЧЕННАЯ ДЛЯ НЕГО ПРИВОДНАЯ СИСТЕМА ДЛЯ МНОГОПОЗИЦИОННЫХ ПРЕССОВ С АВТОМАТИЧЕСКОЙ ПЕРЕДАЧЕЙ ОБРАБАТЫВАЕМЫХ ЗАГОТОВОК С ОДНОЙ ПОЗИЦИИ НА ДРУГУЮ | 1988 |
|
RU2020073C1 |
| МНОГОФУНКЦИОНАЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2016 |
|
RU2641951C1 |
| Аэродинамический тренировочный комплекс | 1989 |
|
SU1766440A1 |
| КОЛЕСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2407668C2 |
| УСТРОЙСТВО для УВЕЛИЧЕНИЯ СИЛЫ тяги ЛОКОМОТИВА с ГРУППОВЬ[М ПРИВОДОМ КОЛЕСНЫХ ПАР | 1966 |
|
SU185362A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ ПРИВОДОМ ГРУЗОПОДЪЕМНОГО КРАНА | 1999 |
|
RU2179144C2 |
| АВТОМАТИЧЕСКИЙ ВАРИАТОР ФМВ | 1995 |
|
RU2088428C1 |
1. Установка для подъема площадок состава слиповых тележек, выполненная в виде передвижных по рельсам тележек, на которые опираются через питаемые от насоса гидравлические домкраты подъемные площадки, отличающаяся тем, что, с целью синхронного движения подъемных площадок ряда последовательно расположенных слиповых тележек и регулирования питания домкратов жидкостью, применено устройство, состоящее из проходящего через все тележки вала, несущего дифференциальный механизм, одно ведущее колесо которого связано с валом, другое связано с опирающимся на грунт грузом, а сателлит при помощи рычажной передачи связан с регулятором производительности гидравлического насоса.
2. Установка по п. 1, отличающаяся применением пускового устройства, состоящего из укрепленного на валу зубчатого сектора, взаимодействующего с самотормозящимся червяком и жестко связанного с блоком, который охватывают две стальные нити, навитые на блок в противоположных направлениях, одна из которых укреплена неподвижно за сваю, а вторая натянута свободно подвешенным грузом.
3. Установка по п. 1, отличающаяся тем, что для возможности включения и регулирования скорости движения подъемных механизмов, осуществляемого регулятором производительности насоса, получающего импульс при вращении сателлита, червяк снабжен ручным маховичком, углом поворота которого определяется относительное смещение ведущих колес дифференциала.
4. Установка по п. 1, отличающаяся тем, что все тележки разбиты на группы, каждая из которых оборудована насосом и дифференциальным механизмом.
