(54) БЕСКОНТАКТНЫЙ ДАТЧИК ПОЛОЖЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесконтактный датчик управления м.и.ахмадинурова | 1979 |
|
SU860313A1 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ ВИБРАТОР | 1965 |
|
SU168031A1 |
| МАГНИТНЫЙ ПРИВОД С ХОДОВЫМ ЯКОРЕМ В ВИДЕ ПОСТОЯННОГО МАГНИТА | 1990 |
|
RU2083013C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД | 1996 |
|
RU2098909C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРЕОБРАЗОВАТЕЛЬ РАСХОДА | 1992 |
|
RU2082105C1 |
| ПРИСТАВНОЙ ЭЛЕКТРОМАГНИТ К КОЭРЦИТИМЕТРУ | 2013 |
|
RU2535632C1 |
| Датчик магнитной анизотропии | 1978 |
|
SU724935A1 |
| Устройство индукционного нагрева металлических деталей кольцевой формы | 1982 |
|
SU1035837A1 |
| БЕСКОНТАКТНЫЙ ДАТЧИК СКОРОСТИ ВРАЩЕНИЯ И ПОЛОЖЕНИЯ РОТОРА | 2012 |
|
RU2488122C1 |
| Источник поляризующего магнитного поля | 1983 |
|
SU1125521A1 |
1
Изобретение относится к системам автоматического контроля перемещений, а именно к бесконтактным датчикам положения.
Известен бесконтактный датчик положения трансформаторного типа, состоящий из магнитопровода, якоря первичной и .вторичной обмоток, причем магнитопровод выполнен со средней магнитопроводящей перегородкой, разделяющей обмотки, и с центральным отверстием по оси катущек, в котором размещен якорь, выполненный в виде стержня с выточкой 1.
Недостатками этого устройства - наличие значительного остаточного (нулевого) выходного сигнала в.нерабочем положении, вследствие неплотного прилегания (из-за имеющихся зазоров) поверхности, якоря к стенкам неподвижного магнитопровода, неполное шунтирование магнитного потока обмотки возбужден.-я, при этом сведение зазоров к минимуму технологически сложно и связано с увеличением затрат, а также отсутствие амортизации соприкасания подвижного и неподвижного элементов магнитопроводов & дополнительно заданным ходом.
Наиболее близким по технической сущности к предлагаемому является бесконтактный датчик положения, содержащий неподвижный броневой магнитопровод с кернами на верхнем и нижнем основаниях, в зазоре между которыми расположено ферромагнитное цилиндрическое ярмо, связанное с подпружиненным щтоком, на кернах оснований броневого магнитопровода расположены измерительная обмотка и обмотка возбуждения 2.
Недостаток указанного устройства состоит в низкой точности из-за наличия нулевого выходного сигнала в нерабочем положении.
Цель изобретения - повьппение точности бесконтактного датчика положения.
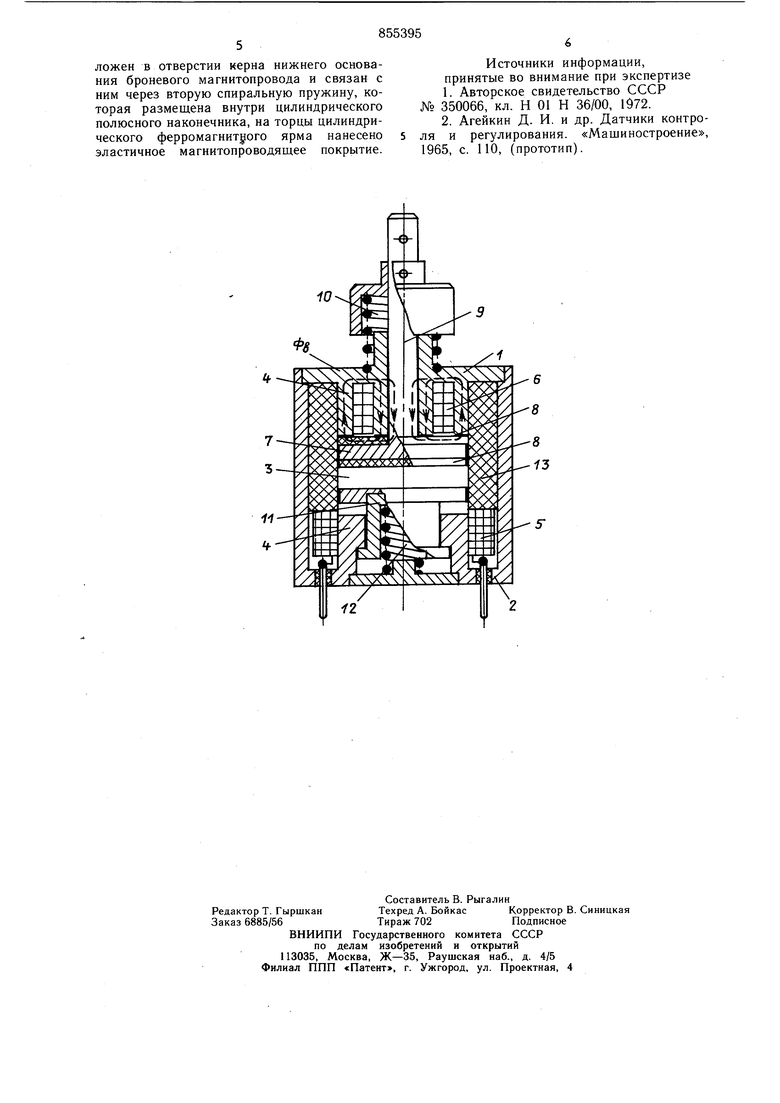
Поставленная цель достигается тем, что в бесконтактный датчик положения, содержащий броневой .магнитопровод с зазором между кернами верхнего и нижнего оснований, об.мотку возбуждения, расположенную на керне верхнего основания, измерительную обмотку, расположенную на керне нижнего основания, в отверстии верхнего основания расположен подвижный шток, на одном конце которого закреплено цилиндрическое ферромагнитное ярмо, расположенное в зазоре между кернами верхнего и нижнего оснований броневого магнитопровода, подвижный шток через первую спиральную пружину связан с верхним основанием броневого магнитопровода, введен цилиндрический ферромагнитный полюсный наконечник, расположенный в отверстии керна нижнего основания броневого магнитопровода и связанный с ним через вторую спиральную пружину, размещенную внутри цилиндрического полюсного наконечника, на торцы цилиндрического ярма нанесено эластичное магнитопроводящее покрытие. На чертеже приведено схематичное изображение бесконтактного датчика положения. Датчик содержит броневой магнитопровод, состоящий из верхнего 1 и нижнего 2 оснований, с зазором 3 между их кернами 4, при этом измерительная обмотка 5 разметена на керне 4 нижнего основания, а обмотка 6 возбуждения - в кольцевом пазу керна 4 верхнего основания 1. Ферромагнитное цилиндрическое ярмо 7, с двухсторонним магнитопроводным эластичным покрытием8, установлено в зазоре 3 параллельно торцам кернов 4 и жестко связано по центру с подвижным штоком 9, подпружиненным в отверстии верхнего основания первой спиральной пружиной 10, в отверстии керна 4 нижнего основания 2 установлен с возможностью осевого смещения цилиндрический по.тюсный наконечник 11 П-образного сечения, с расположенной внутри него второй спиральной пружиной 12, при этом его плоский торец обращен к,ярму 7. Между цилиндрическими поверхностями, внешний - кернов и внутренней - неподвижного броневого магнитопровода, расположен полый цилиндр 13 из изоляционного материала, используемый для направления ярма 7. Бесконтактный датчик положения работает следующим образом. В исходном состоянии шток 9 находится в нерабочем положении за счет сил упругости пружины 10, а ярмо 7 плотно прижато к поверхности торца керна 4 с обмоткой возбуждения 6, которая подключена к источнику переменного напряжения (не показан). В этом случае напряжение на измерительной обмотке 5 близко к нулю, так как магнитный поток создаваемый обмоткой возбуждения б шунтируется ярмом 7, а потоки рассеяния ослабляются зазором 3. Рабочее положение датчика достигается перемещением щтока 9 (вниз) и соприкосновением ярма 7 с плоскостью полюсного наконечника 11, при этом обеспечивается тесная Бзаимоиндуктивная связь между обмотками 5 и 6, в результате чего сигнал на измерительной обмотке 5 достигает заданного значения. В исходное состояние шток 9 и ярмо 7 возвраш,аются после снятия приложенного усилия под действием сил упругости пружины 10. в устройстве полюсный наконечник 11 подпружинен с возможностью осевого смеш,ения, что позволяет смягчить момент соприкосновения с ярмом 7. Магнитопроводяш,ие эластичные покрытия 8 служат для исключения зазоров в местах контакта ярма 7 и торца керна 4 с обмоткой возбуждения 6 - в нерабочем положении, плоскостью полюсного наконечника 11 - в рабочем положении. Таким образом, уменьшение нулевого сигнала на выходе датчика в нерабочем положении достигается полным шунтированием магнитного потока Фв обмотки Boiбуждения, уложенной в кольцевой паз керна верхнего основания 1, ярмом 7 и дополнительным ослаблением ее потока рассеяния зазором между ярмом 7 и полюсным наконечником 11, при этом зазор между поверхностями щтока 9 с отверстием керна не оказывает влияния на выходной сигнал. Кроме того, исключению зазоров в местах контакта ярма с торцом керна верхнего основания 1 - в нерабочем положении, и с полюсным наконечником - в рабочем положении, способствуют покрытия из эластичного магнитопроводящего материала, например резины с наполнителем из феррита, причем улучшение метрологических характеристик, позволяет упростить технологию изготовления датчика, так как отпадает необходимость в точном сопряжении даметров штока и отверстия. Выполнение П-образного полюсного наконечника 11 подпружиненным и с возможностью осевого смещения позволяет обеспечить амортизацию соприкосновения его с ярмом, т. е. достичь эффекта отдачи при срабатывании, что важно при воздействиях на шток механических нагрузок ударного характера. Формула изобретения Бесконтактный датчик положения, содержащий броневой магнитопровод с зазором между кернами верхнего и нижнего оснований, обмотку возбуждения, расположенную на керне верхнего основания, измерительную обмотку, расположенную на керне нижнего основания, в отверстии верхнего основания расположен подвижный шток, на одном конце которого закреплено цилиндрическое ферромагнитное ядро, расположенное в зазоре между кернами верхнего и нижнего оснований броневого магнитопровода, подвижный щток через первую спиральную пружину связан с верхним основанием броневого магнитопровода, отличающийся тем, что, с целью повышения точности датчика, в него введен цилиндрический ферромагнитный полюсный наконечник, который расположен в отверстии керна нижнего основания броневого магнитопровода и связан с ним через вторую спиральную пружину, которая размещена внутри цилиндрического полюсного наконечника, на торцы цилиндрического ферромагнитного ярма нанесено эластичное магнитопроводящее покрытие.
Источники информации, принятые во внимание при экспертизе
