Изобретение относится к автоматике и телемеханике и может быть использовано для высокоточных систем передачи и измерения угла поворота вала. Известны следящие системы для зада ния и измерения; угла поворота вала, содержащие многополюсный фазовращательный приемник угла поворота с модулирующим двигателем, фазовращательный двухполюсный датчик и исполнительный двигатель, связанный с рабоче платформой. Точность данных систем при использовании коммутаторов для устранения нестабильности нуля электроэлементов достигает одной угловой секунды l и 2. Однако дальнейшее повьппение точности ограничивается наличием погрешности, обусловленной взаимным влиянием выходных сигналов многополюсного фазовращательного приемника при передаче их по каналам связи и паразитными взаимоиндуктивностями самого фазовращательного приемника, а так же недостаточно высоким коэффициентом электрической редукции следящей системы, увеличение которого ограничено технологическими возможностями при изготовлении многопоЛюсиого приемника . Наиболее близким по технической сущности к предлагаемому является устройство, содержащее фазовращательный приемник, первый вход которого кинематически связан с валом модулирующего двигателя, подключенного через первый коммутатор к двухфазному источнику питания, второй вход - с валом поворотной платформы и исполнительным двигателем. Первый вход фазовращательного приемника через корректирукиций фазовращатель, фазорасщепитель, второй коммутатор и фазовращательный датчик подключен к первому входу фазового дискриминатора, ко второму входу которого подключен второй выход фазовращательиого приемника. Выход фазового дискриминатора через усилитель и третий коммутатор подключен к обмотке управления исполнительного двигателя. Такое устройство, представляющее собой фазовую следящую систему точного отсчета с электрической редукцией, оснащается системой грубого отсчета, состоящей из синусно-косинусного вращающегося трансформатора (СКВТ)-приемника и С КВТ-датчика, которые кикематически связаны соответственно со вторым входом фазовращательного приемника и ротором фазовращательного датчика 3 J.
; Недостатком этого устройстйа являetCH ограниченная точность, определяемая погрешностью фазовращательного приемника (из-за паразитных взаимоиндуктивных связей между двумя выходами) и погрешностью фазовращательного датчика (из-йа ограниченного коэффициента электрической редукции, определяемого числом пар полюсов многополюсного фазовращательного приемника) .
, Цель изобретения - повышение точности задания угла поворота вала. Поставленная цель достигается тем, что в устройство для задания угла поворота, содержащий фазовращательный приемник, первый вход которого кинематически соединен с валом модулирующего двигателя, выводы питания которого соединены через первый коммутатор с первым источником питаНИН, второй вход фазовращательного приемника кинематически соединен с ротором сииусно-косияусного вращающегося трансформатора-приемника., с валом поворотной платформы и с валом первого исполнительного двигателя, вал фазовращательного датчика кинематически соединен с первым блоком шкал, а через редуктор - с ротором синусно-косинусного вращающегося трансформатора-датчика, первый вьгход фазовращательного приемника соединен через корректирующий фазовращатель со входом фазорасщепителя, выходы которого соединены через второй коммутатор со входами фазовращательного датчика, выход фазовращательного дискриминатора соединен через первый усилитель со входами третьего коммутатора, выход синусно-косинусно го вращающегося трансформатора-датчика соединеНцЧерез второй усилитель с выводами питания первого исполнительного двигателя, введены дбполнительный фазовращатель, детекторы нуля синхронный детектор, второй блок шка дополнительный синусно-косинусньй вращающийся трансформатор, элемент, сравнения, дополнительный источник питания, дополнительный исполнительный двигатель, вал которого кинематически соединен со вторым блоком шк и с ротором дополнительного синуснокосинусного вращающегося трансформатора,- выход дополнительного источника питания соединен со входом синусно-косинусного вращающегося трансформатора-приемника, выходы которого соединены со входами дополнительного синусно-косинусного вращаницегося траформатора, выходы которого соединены со входами синусно-косинусного вращающегося трансформатора-датчика, первый и второй выходы фазовращательного приемника соединены с первым и вторым входами синхронного детектора выход которого соединен через первый детектор нуля с первым входом фазового дискриминатора, а через дополнительный фазовращатель и второй детектор нуля - с первым входом злемента сравнения, выход фазовращательнбго датчика соединен через третий детектор нуля со вторым входом элемента сравнения, выход которого соединен со вторым входом фазового дискриминатора, выходы третьего коммутатора соединены с выводами питания дополнительного исполнительного двигателя.
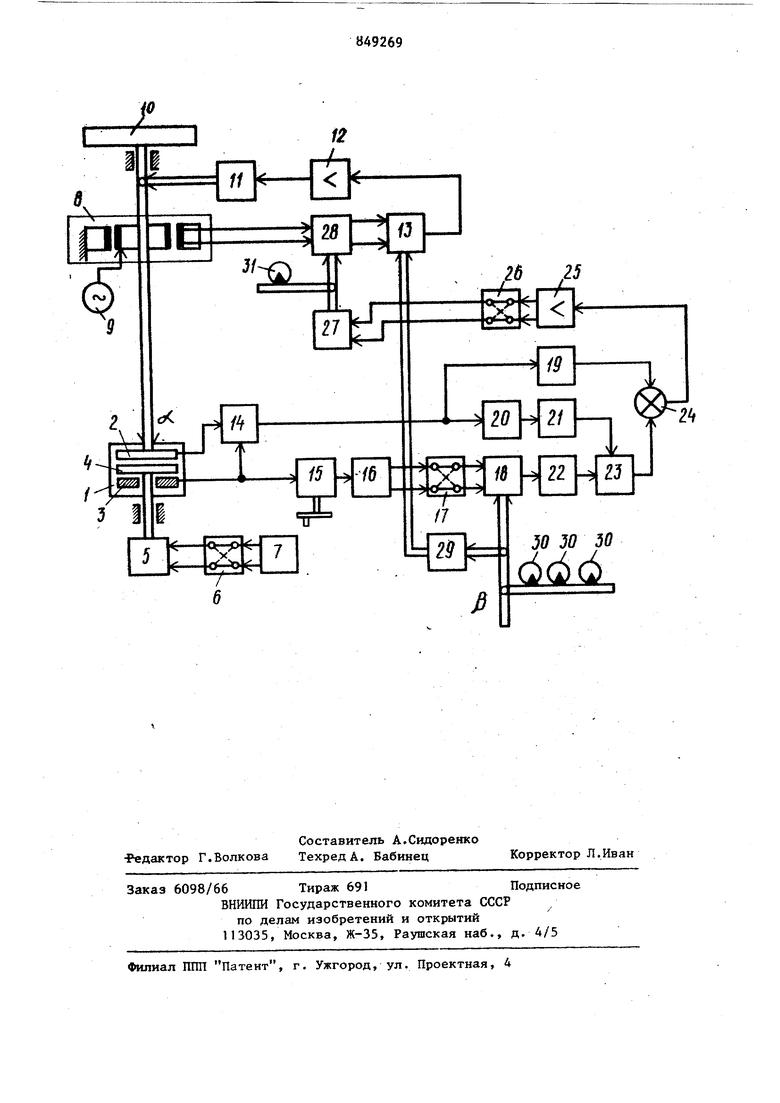
На чертеже представлена блок-схема устройства дпя задания угла поворота.
Устройство содержит фазовраща- , тельный приемник 1, содержащий ро- . тор 2, статор 3 и модулятор А. Первый вход (модулятор) кинематически связан с валом модулирующего двигателя 5, подключенного через первый коммутатор 6 к двухфазному источнику 7 питания. Второй вход (ротор) связан кинематически с ротором СКВТ-приемника 8, подключенного к источнику 9 питания, с валом поворотной платформы 10 и исполнительным двигателем 11, подключенным через первый усилитель 12 к выходу СКВТ-датчика 13. Первый выход (обмотка статора 3) фазовращательного приемника подключен к одному из входов синхронного детектора 14 и через корректирующий фазовращатель 15, фазорасщепитель 16, второй коммутатор 17 - ко входу фазовращательного датчика 18. Второй выход (обмотка ротора 2) фазовращательного приемника,подключен к другому входу синхронного детектора 14, выход которого подключен ко входам первого детектора 19 нуля и дополнительного фазовращателя 20, выход которого подключен ко входу второго детектора 21 нуля. Выход фазовращательного датчика 18 подключен ко входу третьего детектора 22 нуля, выход которого соединен с первым входом злемента 23 сравнения, второй вход которой связан с выходом второго детектора 21, а выход - с первым входом фазового дискриминатора 24, второй вход которого подключен к выходу первого детектора 19 нуля. Выход фазового дискриминатора 24 через второй усилитель 25 и третий коммутатор 26 подк1почен к дополнительному исполнительному двигателю 27, кинематически связанному с дополнительным СКВТ 28 входные обмотки которого пЬдключ ены к выходным обмоткам статора СКВТ-приемника 8, а выходные обмотки - к входным обмоткам СКВТ-датчика 13. Фазовращательный датчик 18 через редуктор 2.9 связан с СКВТ-датчик ом 13. С ротора-к ми фазовращательного датчика 18 и дополнительного СКВТ 28 кинематически связаны соответственно блоки 30 и 31 шкал. Обмотка ротора 2 фазовращательного приемника выполнена с числом пар полюсов р., а обмотка статора 3 с числом пар полюсов р.
Устройство работает следукнцим образом.
Через понижающий редуктор 29 задаваемый по шналам 30 углов (5 передается ротору СКВТ-датчика 13. Сигнал рассогласования на выходе СКВТдатчика 13 воздействует через усили- тель 13 на исполнительный двигатель 11, который поворачивает платформу 10 на угол oL с погрешностью, определяемой редуктором 29 в следящей системе, составленной из СКВТ-датчика 13 и СКВТ-приемника 8. При зтом угол ct представим в виде oL Nt, где N - скорость вращения платформы 10 (об/с)I t - время, а угол Л в виде , t, где Пфр- скорость вращения ротора фазовращательного датчика 18.
При вращении модулятора 4 со скоростью П| (об/с) , с обмотки ротора 2
фазовращательного приемника 1 снимается синусоидальный сигнал с частотой
(1)
(М+п)р
а с обмотки статора 3 - сигнал с частотой
который сдвигается по фазе корректирукяцим фазовращателем 5, служащим для ручной выставки начального нуля устройства. С выхода корректирующего фазовращателя сигнал поступает на фазовраи атеяь 16 для образования на его .выходе дву азного. нвпрякення,тскоторьт питается фазовращательный датчик 18. Синусоидальное напряжение Н выходе фазовращательного датчика 18 имеет частоту
. зг:
На входа синхронного детектора 14 поступают сигналы с частотами t| --И f, в результате на его выходе ««еется синусоидальный сигнал с частотой
(V)
,-f2
Первый детектор 19 нуля преобразует данный сигнал в последовательность ;импульсов (образуешлс. В моменты перехода синусоиды нулевого значения) с частотой, F, которые поступают на вход фазового дискриминатора 24, в качестве которого может быть использован триггер. Сигнал с выхода синхронного детектора 14 поступает также на дополнительный фазовращатель 20, а с его выхода - Иа второй детектор 21 нуля, который образует импульсы с частотой F, длительность которых в несколько раз превышает длительность
импульсов, поступаемых с третьего детектора 22 нуля и имеющих частоту fipB- При настройке устройства регут лировкой дополнительного фазовращателя 20, импульсы с выхода второго детектора 21 нуля сдвигаются по времени так, чтобы обеспечить надежное выделение элементом 23 сравнения отдельных импульсов, поступающих с частотой F в моменты поступления импульсов с частотой f В результате на выходе .схемы совпадения -.получается последовательность коротких импульсов с частотой F, вьщеленных из последовательности импульсов с частотой т.е. осуществляется деление частоты в число раз, равное F -f,. Коэффициент К деления, определяется при установившемся положении платформы, т.е. при (6) Р,-Р2 Таким образом, частота импульсов, поступающих на первый вход фаз вого дискриминатора 24 может быть определена в виде , деп Pj, Фазовый дискриминатор определяет рассогласование по фазе между импульсами, поступающими на его вхо ды. Сигнал рассогласования через ус литель 25 и коммутатор 26 поступает на дополнительный исполнительный двигатель 27, который вращает дополнительный СКВТ 28, вырабатывающий сигнал на выходе СКВТ-датчика, пропорциональный погрешности редуктора 29, СКВТ-датчика 13 и СКВТ-при емника 3. В результате исполнительньтй двигатель 11 удерживает платфор 10 в положении, которое соответству нулевому значению сигнала рассогласования на выходе дискриминатора 24 Таким образом, система из фазовращательных датчика 18 и приемника 1 является точной (корректирующей си темой, исправляющей погрешность гру бой системы, составленной из СКВТ 8 и 13) . Коэффициент электрической редук ции точной системы определяется из условия т.е. CVPa PtMPrPo.) )P,- ;yvP2 получаем РчР Р . Таким образом, коэффициент элек трической редукции точной системы сравнению с известной увеличиваетс В ЙР| раз. Например, если принять 184, , то р- р- 45 раз. Следовате но, если погрешность фазовращатель ного датчика 18 с редуктором 29 ра на 10 угл. мин, то погрешность становке угла, обусловленная этой ричиной, будет .- а в известном Sp-1 .o° В известном устройстве ввиду того что PJ Р- выходные сигналы обмоток ротора и статора фазовращательного приемника имеют одинаковые (в статике) частоты. Поскольку сигнал ротора изменяется по фазе в функции от угла поворота ( ) то связь между сигналами ротора и статора, обусловленная паразитными взаимоиндуктивностями в самом приемнике и в каналах связи, вызывает погрешиость в установке угла, изменяющуюся с периодом 21С|Р.|. В предпагаемом устройстве эта погрешность принципиально исключается, так как сигналы ротора и статора фазовращательного приемника имеют разные частоты (ввиду того, что R Pj)« а основной функциональный сигнал частоты -f) образуется смешиванием сигналов ротора и статора на синхронном детекторе 14, т.е. в отличие от известного, где по возможности сигна ш ротора и статора изолируют друг от друга, в предлагаемом устройстве смешивание этих сигналов является принципиальным условием работы. Погрешность, обусловленная нестабильностью электроэлементов устройства из-за старения, влияния изменения температуры окружающей среды, обнаруживается с помощью коммутаторов 6, 17 и 26 и устраняется с помощью1 корректирующего фазовращателя 15 по показаниям блока 31 шкал. Таким образом, в предлагаемом устройстве практически исключается ряд принципиальных погрешностей, присущих лзвестному. Точность предлагаемого устройства главным образом определяется погрешностью (меняющейся с периодом 21Ь) фазовращательного приемника, обусловленной цесоосностью осей вращения ротора и модулятора и не превышающей (при допусках на установку порядка 10 мкм) 0,3-0,5 угл. с. Формула изобретения Устройство для задания угла поворота, содержащее фазовращательный приемник, первый вход которого кинематически соединен с валом модулируемого двигателя, вьгаоды питания которого соединены через первый коммутатор с первым источником питания, второй вход фазовращательного приемника Кинематически соединен с ротором синусно-косинусного вращающегося трансформатора-приемника, с валом поворотной платформы и с валом первого исполнительного двигателя, вал фазовращательного датчика кинематически соединен с первым блоком шкал, а через редуктор - с ротором синуснркосинусного вращакщегося трансформатора-датчика, первый выход фазовращательного приемника соединен через корректирующий фазовращатель со входом фазорасщепителя, выходы которого соединены через второй коммутатор со входами фазовращательного датчика выход фазового дискриминатора соединен через первый усилитель со входами третьего коммутатора, выход синусно-косинусного вращающегося трансформатора-датчика соединен через второй усилитель с вьшодами питания первого исполнительного двигателя, отличающееся тем, что, с целью повышения точности в него введены дополнительный фазовращатель, детекторы нуля, синхронный детектор, второй блок шкал, дополнительный синусно-косинусный вращающийся трансформатор, элемент сравнения, дополнительный источник питания, дополнительный исполнительный двигатель, вал которого кинематически соединен со вторым блоком
4926910
щкал и с ротором дополнительного синусно-косинусного вращающегося трансформатора, апсод дополнительного источника питания соединен со входом синусно-косинусного вращающегося трансформатора-приёмника, выходы которого соединены со входами дополнительного синусно-косинусного вращающегося трансформатора, выходы тсоJQ торого соединены со входами синусно-косинусного вращающегося трансформатора-датчика, первый и второй выходы фазовращательного приемника соединены с первым и вторым входаJ5 ми синхронного детектора, выход которого соединен через первый детектор нуля с первым входом фазового дискриминатора, а через дополнительный фазовращатель и второй детектор
20 нуля - с первым входом элемента сравнения , выход фазовращательного датчика соединен через третий детектор нуля со вторым входом элемента сравнения, выход которого соеда1нен со
25 вторым входом фазового дискриминатора, выходы третьего коммутатора соединены с выводами питания дополнительного исполнительного двигателя. Источники информации,
30 принятые во внимание при экспертизе
1,Элементы ци1)ровых систем управления. Сб. статей под ред. В.А.Мясникова. Л., Наука, 1971, с. 234.
2.Авторское свидетельство СССР 5 226693, кл. G 08 С 19/12, 1967.
3.- Авторское свидетельство СССР № 552587, кл. G 05 В 11/01, G 08 С 19/12, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Фазовая следящая система | 1975 |
|
SU543973A1 |
| Фазовая система для преобразованияуглА пОВОРОТА B КОд | 1979 |
|
SU842901A2 |
| Устройство для контроля многополюсных вращающихся трансформаторов | 1979 |
|
SU868815A1 |
| Фазовая следящая система | 1976 |
|
SU779970A1 |
| Устройство для преобразования угла поворота вала в код | 1974 |
|
SU610148A1 |
| Устройство для преобразования угла поворота вала в код | 1976 |
|
SU640353A1 |
| Устройство для измерения малых угловых скоростей | 1976 |
|
SU591767A1 |
| Преобразователь кода в угловое положение вала | 1983 |
|
SU1088048A1 |
| Устройство для проверки электрических машин | 1981 |
|
SU976467A1 |
| Устройство для проверки многополюсных датчиков угла | 1975 |
|
SU525151A1 |