(54) УСТРОЙСТВО для ПРЕОБРАЗОВАНИЯ УГЛА ПОВОРОТА ВАЛА В КОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угла поворота вала в код | 1977 |
|
SU660072A1 |
| Преобразователь угла поворота вала в код | 1977 |
|
SU720452A1 |
| Устройство для проверки преобразователей угол-код | 1976 |
|
SU743005A1 |
| Устройство для задания угла поворота | 1979 |
|
SU849269A1 |
| Фазовая система для преобразованияуглА пОВОРОТА B КОд | 1979 |
|
SU842901A2 |
| Преобразователь угол-код | 1974 |
|
SU464003A1 |
| Преобразователь угла поворота вала в фазовый сдвиг | 1979 |
|
SU855396A1 |
| Двухканальный преобразователь угла поворота вала в код | 1976 |
|
SU607248A1 |
| Преобразователь угла поворота вала в код | 1980 |
|
SU1023373A1 |
| Устройство для преобразования угла поворота вала в код | 1976 |
|
SU640353A1 |
Изобретение относится к высокоточным системам автоматического управления и может быть использовано в вычис-. лительной технике.
Известны двухотсчетные системы автоматического управления, содержащие каналы грубого и точного отсчета, состоящие, из датчика угла, приемника, фазового дискриминатор1а, исполнительного механизма, преобразователя угла в код, и сумматора,, вkoды которого соединены соответственно с выходами преобразова НИИ каналов грубого и точного отсчета l.
Известны устройства для автоматического регулирования, в которых для повышения их точности применяется управление по входному воздействию и его производным 2, З .
Из известных систем наиболее близкой по технической сущности к изобретению является система, содержащая канал грубого отсчета, состоящий из последовательно соединенных двухполюсного датчика угла, двухполю.сного
,приемника, сумматора, второй и третий входы которого соединены соответственио через дифференциатор и непосредственно с выходом преобразователя чаСтоты в напря)кение, усилителя и исполнительного двигателя, выход которого к-инематически связан с ротором двухполюсного приемника и -валом преобразователя угол-код, кайал точного отсчета, состоящий из последовательно соединенных многополюсного фазовращательного датчика угла, двухполюсного фазовращательного приемника, фазового дискриминатора, сумматора, второй и . третий входы которого соединены соответственно через дифференциатор и непосредственно с выходом, преобразователя частоты в напряжение, усилителя и исполнительного двигателя, вал которого кинематически связан с ротором двухполюсного фазовращательногр приемника и валом преобразователя угл-О код, и суммируклдий счетчик, входы которого соединены с выходами преобразователей угол-код грубого и точного каналов отсчета 4 .
Недостатком известной системы является ее невысокая статическая .точность.
Целью изобретения является повышение статической точности устройства.
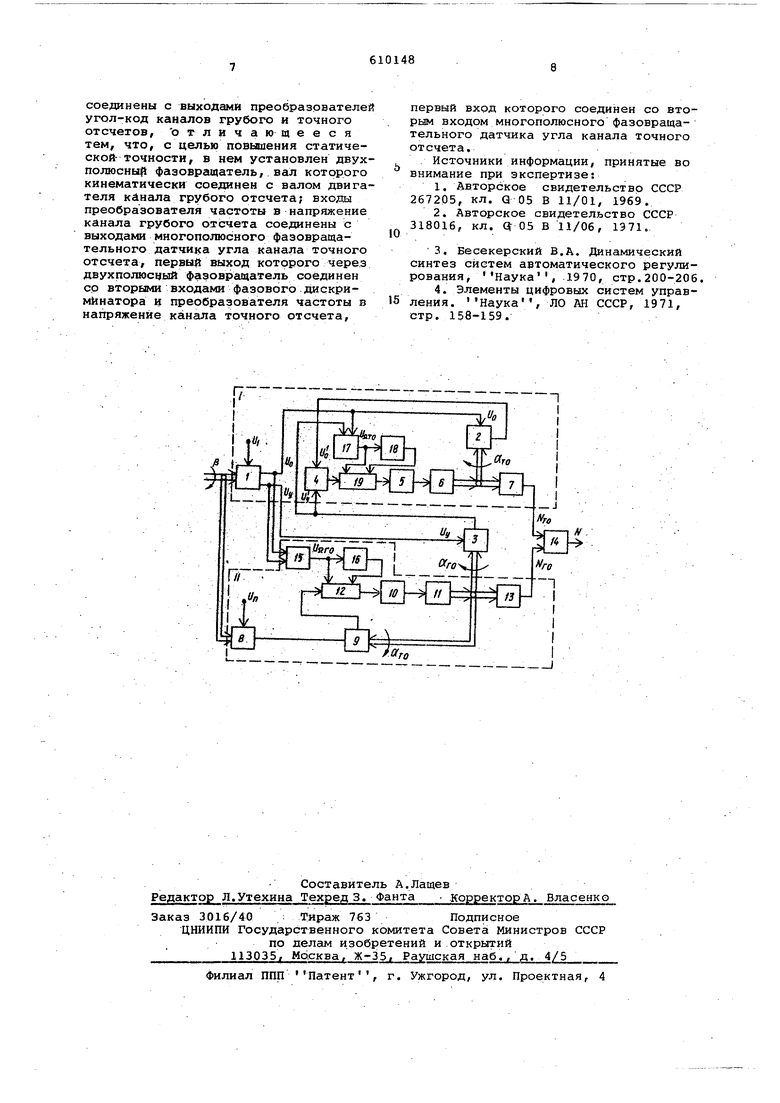
Поставленная цель достигается тем что в предложенном устройстве уста новлен двухполюсный фазовращатель, Ва которого кинематически соединен с валом двигателя канала грубого отсчета, Входы преобразователя частоты в напря жение канала грубого отсчета соединены с выходами многополюсного фазовращателъного датчика угла канала точног отсчета,первый выход которого через двухполюсный фазоВрацдатель соединен с BTOpfcjMii входами фазового диcкpиlvинaтора и преобразователя частоты в напряжение канала точного отсчета, первый вход которого соединен со вторым входом многополюсного фазовращательно го датчика угла канала точного отсчет На чертеже представлена структурная схема устройства. Оно содержит многополюсный фазовра щательный датчик угла 1.канала 1 {точ ного отсчета), двухполюсный фазовращательный приемник 2 канала J , двух полюсный фазовращатель 3, фазовый дис криминатор 4 канала I , усилитель 5 . канала I , исполнительный двигатель б канала J , преобразователь 7 угол-код канала I, двухполюсный датчик 8 канала. W , (грубого, отсчета), двухполюсный приемник 9 канала Я i усилитель 10 канала Я , исполнительный двигатель 11 канала М , сумматор 12 канала , преобразователь 13 угол-код канала ji , суммирукедий счетчик 14, преобразователь 15 в напряжении канала, дифференциатор 16 канала Ц , пре образователь 17 частоты в напряжение канала | , дифференциатор 18 канала I и сумматор 19 канала I. На чертеже обозначены /J - выходной угол пов.орота (угол поворота оси задавания; ci.-,o,oC,.g- углы отработки ка налом точного и грубого отсчетов; d jjугол поворота двухполюсного фазовращателя; и Up - напряжение питания многополюсного и двухполюсного датчиков угла каналов точного и грубого 6т счетов; Uo U - выходные опорное и управляющее напряжения многополюсного фазовращательного датчика каиала точного отсчета; , и у - выходное напряжение ДВУХПОЛЮСНЫХ фазовращателей соответственно каналов точного и грубого отсчетов;; числовой эквивалент углового положения осей отработки каналов точного и грубого отсчетов; М - ЧИСЛОВОЙ эквивалент углового положения вала объекта (оси задавания). Устройство работает следующим образом. Статический ре-ж им. В исходном состоянии датчики 1 и 8, приемники точного 2 и 9 каналов точногр и грубого отсчета и фазовращатель 3 находятся в согласованном поло жении. При повороте оси задавания на угол /3 ротор Датчика 8 поворачивается также на угол /3 . Под действием возникшего напряжения рассогласования двигатель 11 разворачивает ротор приемника 9 до согласованного положения, при котором напряжение рассогласования равно 0. Ротор приемника 9 оказывается развернутым при этом на угол dif ,а ротор фазовращателя 3 на угол, равный /- у 1 гдеДЛрд - погрешность трансформаторной передачи датчика 8.и приемника 9 ; . погрешность кинематической цепи; передаточное число кинематической цепи, равное t С преобразователя 13 14 поступает числовой эквивалент N. пропорциональный величине , Одновременно с поворотом ротора датчика 8 на угол р разворачивается на этот же угол ротор датчика 1. Фаза выходного управляющего напря5кения и ч сдвигается относительно фазы опорного напряжения UQ на угол равный. .Kgj, (р+дл) где лЛд - погрешность многополюсного датчику, приведенная к его входному валу. Дискриминатор 4 выявляет разность фаз между выходными напряжениями приемника 2 и фазовращателя Зи-у . Учитывая, что фаза напряжения и сдвинута на угол Cfi доСд) Кд , а ротор фазовращателя 3 развернут каналом грубого отсчета на УГолв(((рд+бЛр)Кзр,. на выходе дкскркмингчтора 4 возникает напряжение/рассогласования , пропорциональное величине .вз) то «ЧА -Ха-р. ( ... - инструментальная погрешность фазовращателя 3, т.е. погрешность преобразователя угла поворота ротора фазовращателя Crt-тр ) в фазовый сдвиг, в аходного напряжения U ; fo - начальный фазовый сдвиг выходного напряжения приемника 2, Под действием напряжения рассогласования (лUVo)кcпoлнитeльный двигатель б поворачивает ротор приемника 2, а вместе с ним и преобразователя 7 до тех пор, пока напряжение рассогласования не станет равным нулю. Это означает, что ротор приемника 2 развернут на угол, равны -т.о -Кв.р. (. -Л. ) где Инструментальная погрешность приемника 2, т.е. погрешность преобразования угла поворота его ротора () в фазовый сдвиг выходног напряжения Уо С преобразователя 7 на счетчик 14 подается числовой эквивалент N , п порциональный величине () Суммарный ЧИСЛОВОЙ эквивалент углового положения вала объекта на выходе счетчика 14 равен NNr.. N..1-lll2:S. Как видно числовой эквивалент N пропорционален, угловому положению ва объекта ft с погрешностью ДУа...в.а т.е. с погрешностью, определяемой инструментальными погрешностями фазо вращателей 2 и 3 и датчика 1. Однако эта ошибка незначительна т.к. точность современных фазовращателей составляет 1-2 эл мин. При К «128 получим 2 ( т2) 60 Ve.,Ve.2 е 4,0 т 2УГЛ Погрешность 4 оСд миогополюсного фазовращательного датчика не превьииает 2 угл.сек. Допустимая скорость вращения фазовращателей (п фат ) с использованием СКВТ типа 5БВТ равна ЮООоб/мин, т.е при точности в 172 угл.с можно повысить рабочие скорости оси задавания до величины, равной K- °lIFro«/-°/ (для следящей системы с использовани ем механического дифференциала 1,). Динамическийрежи При вращении вала датчика 1 со ск ростью И U) « p(i) (т.е. оси задавания) следящая система канала грубого отсчета отрабатывает это входное воздействие с динамической ошибкойвд,) Следящая система канала точного отсчета отрабатывает ошибку канала грубого отсчёта вд„„го с динамической оишбкой в Одновременно с вращением входного вала (вала датчика 1) и ротора фазовращателя 3 на выходе преобразователей 15 и 17 возникают сигналы . и (t) , пропорциональные скорости входного воздействия каждого канала. Эти сигналы непосредственно и через дифференциаторы 16 и 18 (соответственно) суммируются с сигналами рассогласований каналов грубого и точного отсчетов и в соответствии с принципами комбинированного управления создаются условия для компечслдии динамических ошибок(0-д, (tX днн. каналов грубого и точного отсчетов. Числовой эквивалент N на выходе счетчика 14 воспроизводит входную величину (угол поворота вала объекта) без ошибки, обусловленной динамической ошибкой следящей системы, до (4 + 2 п-1) производной от входного воздействия (угла поворота оси задавания) , где п - число дифференцирующих звеньев каждого блока 16 и 18. Применение предлагаемой системы в системах автоматического управления и вычислительной технике позволяет повысить точность преобразования угла в числовой эквивалент по крайней мере в три раза и расширить диапазон рабочих скоростей системы. Формула изобретения Устройство для преобразования угла поворота вала в код, содержащее канал грубого отсчета, состоящий из последовательно соединенных двухполюсного датчика угла, двухполюсного приемника, сумматора, второй и трети: входы которого соединены соответственно через дифференциатор и непосредственно с выходом преобразователя частоты в напряжение, усилителя и исполнительного двигателя, вьлход которого кинематически связан с ротором двухполюсного преемника и валом преобразователя угол-код, канал точного отсчета, состоящий из последовательно соединенных многополюсного фазовращательного датчика утла, двухполюсного фазовращательного приемника,- фазового дискриминатора, сумматора, второй и третий входы которого соединены соответственно через дифференциатор и непосредственно с выходом преобразователя частоты в напряжение, усилителя и исполнительного двигателя, вал которого кинематически связан с ротором двухполюсного фазовращательного приемника и валом преобразователя угол-код, и суммируюидай счетчик, входы которого
соединены с выходами преобразователей угол-код каналов грубого и точного отсчетов, отличающееся тем, что, с целью повьдпения статической- точности, в нем установлен двухполюсныр фазовращатель, вал которого кинематически соединен с валом двигателя канала грубого отсчета; входы преобразователя частоты в напряжение канала грубого отсчета соединены с выходами многополюсного фазовращательного датчика угла канала точного отсчета, первый выход которого через двухполюсный фазовращатель соединен со вторыми входами фазового дискриминатора и преобразователя частоты в напряжение канала точного отсчета.
первый вход которого соединен со вторым входом многополюсного фазовращательного датчика угла канала точного отсчета.
Источники информации, принятые во внимание при экспертизе:
стр. 158-159.
1
-
