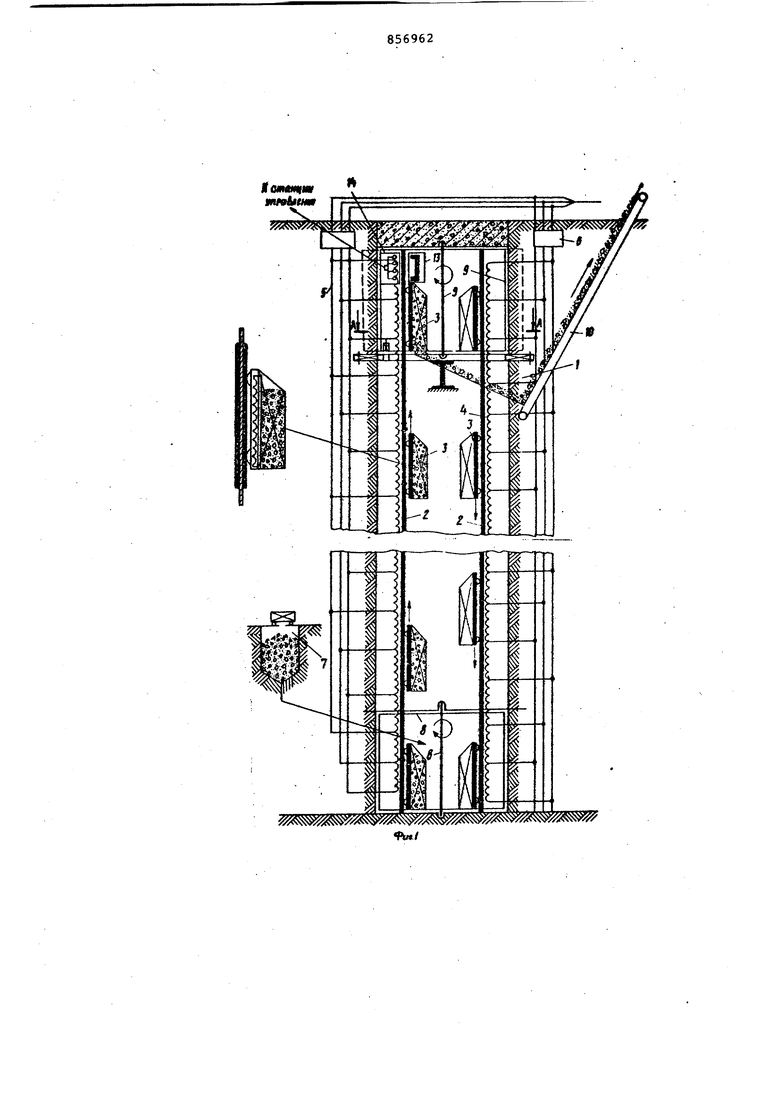
Изобретение относится к подъемнотранспортной технике и может быть ис пользовано для подъема всех видов по лезных ископаемых из глубоких и сверхглубоких шахт преимущественно с вертикальными стволами в угольных областях горнорудных промышленностей добывакицих полезные ископаемые. Известен шахтный подъемник,содержащий подъемный сосуд, перемещаемый вдоль направляющих шахтного ствола, и привод подъемного сосуда, включающий в себя электродвигатель, в цепь питания которого включены элементы коммутации режимов работы, размещенные в верхней и нижней частях шахтно го ствола l. Недостатком известного подъемника является сложность конструкции. Цель изобретения - упрощение конструкции. Эта цель достигается тем, что электродвигатель выполнен линейным с размещением вдоль шахтного ствола ста тором и с поступательно перемещающимися вдоль него ротором, непосредственно связанным с подъемным сосудом. Кроме того, линейный двигатель выпол нен коллекторнь&1, питаемым от постеянного тока и с установленным на подъемном сосуде якорем, связанным через щеточно-коллекторный узел и токосъемники с троллями питания. На фиг. 1 представлен игахтный подъемник, общий вид на фиг. 2 разрез А-А; на фиг. 1/ на фиг. 3 схема торможения (згииедления) подъемного сосуда. Подъемник содеряэдт вертикальный ствол 1, в котором размещены развернутые на плоскость статоры 2 с двойными магнитонесоединенными обмотками 2.1-2.12, являющиеся одновременно направляющими проводниками и несущей конструкцией тормозного устройства подъемных сосудов (скипов) 3, ребра жесткости (рама) которых являются одновременно и роторами линейного . электродвигателя, силовая обмотка 4, работающая в обычном исполнении или режиме сверхпроводимостиJ троллей 5 питания, работающие от систем постоянного или переменного тока с обычной или высокой частотой, выпрямители тока и преобразователи 6 частоты, загрузочный бункер 7 с опрокидывателем шахтных вагонеток обычной конструкци загрузочное нижнее поворотное устройство 8 карусельного типа и разгрузочное верхнее 9, выполняющие роль посадочных площадок или подкидных кулаков, разгрузочный щиток 9 и конвейер или другое транспортное устройство 10, подающего полезное ископаемое на обогатительную фабрику. Механическое перемещение ротора относительно статора для изменения скорости движения ротора, осуществляется с помощью неподвижных профилей (на чертежах не показаны).
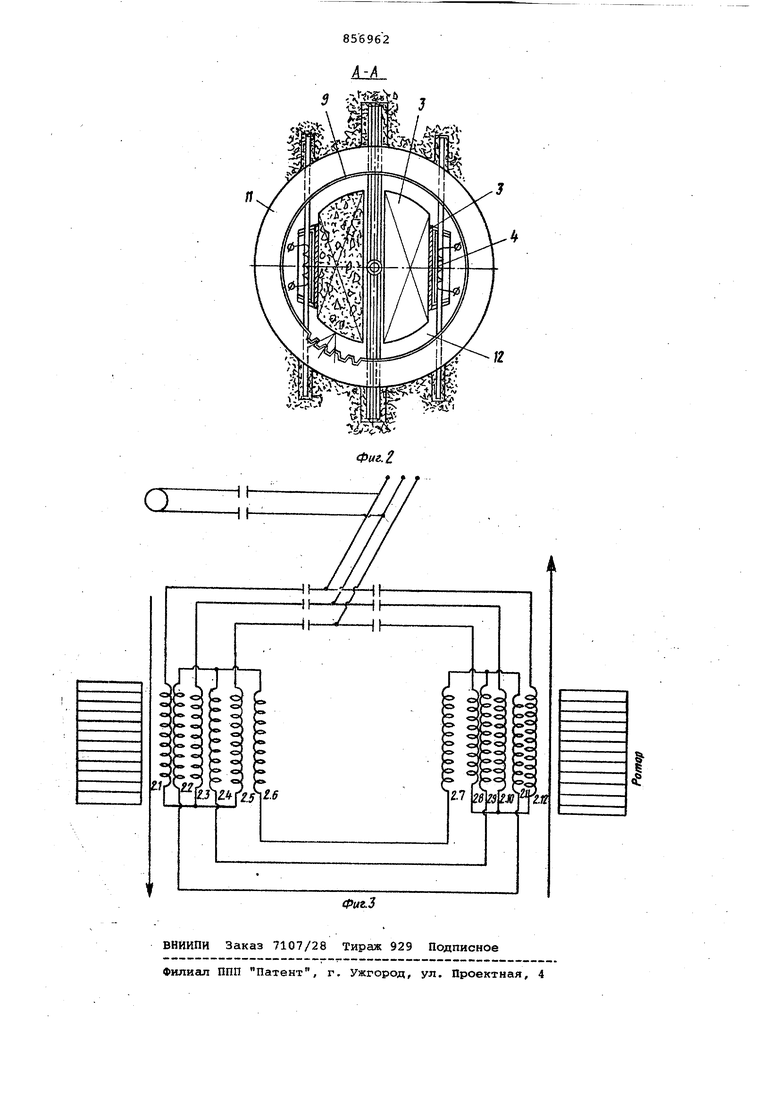
Верхнее разгрузочное 9 и нижнее загрузочное 8 поворотные устройства представляют собой металлическую стержневую симметричную конструкцию, замкнутую по торцам круговыми ободами J она вращается вместе с вертикальным валом (осью) в подшипниковых опорах, из которых нижняя размещена на центральных расстрелах, а верхняя на перекрытии ствола шахты (фиг.2). Расположение подшипниковых опор нижнего загрузочного устройства развернуто на 180° .
При большом количестве сосудов и недостаточно большой массе каждого большое зубчатое колесо 11 наружной кромкой крепится в круговом пазу (лунке) целика ствола. При меньшем количестве и большем весе сосудов и диаметре ствола горная камера поворотного устройства расширяется:большое зубчатое колесо 12 внутреннего зацепления укладывается.на железобетонное тело шейки ствола и крепится к ней анкерными болтами/ устойчивость конструкции достигается путем укрепления роликовых опор на ободе поворотного устройства, которые перекатываются по боковой поверхности большого зубчатого колеса.
Передачу вращения поворотного устройства от электродвигателя можно осуществить непосредственно на его вертикальный вал через редуктор как с цилиндрическими, так и с коническими шестернями. На чертеже показано укрепление привода на вращающейся конструкции для планетарной передачи на неподвижное большое зубчатое колесо, расположенное пр периметру поперечного сечения ствола.
Блокировку конечных пакетов развернутого по стволу статора линейного электродвигателя, находящихся в поворотных устройствах с приводами этих устройств лучше всего осуществлять с помощью специально приспособленных для этой цели комплектов бесконтактных концевых выключателей, выпускаемых серийно для защиты канатных подъемных установок.
Постоянные магниты 13 крепятся на всех подвижных сосудах, датчики 14 внутри поворотных устройств, а станции 15 управления (не показано) устанавливаются в любом месте, например кл пульте оператора, и связываются срответственно с датчиками кабелями
длиной до 1200 м для каждого комплекта.
Cxeivia плавного электрического торможение: (замедления) подъемного сосуда (фиг. 3) может быть выполнена с использованием двойных магнитно не соединенных обмоток статора, причем в периоды пуска и остановки изменение оборотов можно производить путем включения в цепь статоров динамомашины 15. Основное электрическое торможение и уравновешивание грузов во всех периодах движения ротора производится за счет-наличия вторичных .обмоток статора, и которых при подключении к статорам электрической сети и движении ротора вдоль своего статора вниз, индуктируется ЭДС, которая затрачивается на движение ротора, подключающегося вверх. Т.е. статор с дополнительной второй обмоткой у которого ротор движется вниз, буде генератором для статора, ротор которого движется вверх. Постоянство магнитного зазора между ротором и статором может быть сохранено за счет роликовой опоры (не показано), выполненной из немаг нитопроводного материала. Подъемный сосуд может быть расположен не над ротором, а параллельно с ним,
В случае применения линейных электродвигателей постоянного тока, питание индуктора осуществляется с помощью устройства с вращающимися щетками и неподвижными ламелями.
В этом случае питание может осуществляться через троллей (возможно и два), смонтированный на всю глубину ствола цепи.
В качестве тормозного устройства может .быть использован гидравлически тормоз с масляным насосом, приводимы в действие от электрического мотора или от свободного конца вала привода коллектора. Для переменного тока насос можно приводить в действие ;. только от ротора, вращающегося под действием основного магнитного поля силового статора.
Подъемник работает следующим образом.
Сосуд 3 загружают из бункера 7 обычным способом, самотеком. Загружаемый и разгружаемый сосуды 3 находятся в поворотных устройствах 8 к 9 только в периоды загрузки и разгрузки , до подхода к этим устройствам очередных сосудов, движущихся в уста новившемся режиме по стволу глубокой или сверхглубокой шахты. Время названного нахождения сосудов в поворотных устройствах определяется одинаковым количеством, емкостью к массой каждого из многих груженных и Порожних сосудов, расчетной скоростью их передвижения и таким расстоянием между ними, за которое обеспечивается их загрузка, разгрузка и подготовка поворотных устройств для приема последую1дих сосудов. При подключенииобмоток пакетов развернутых на плоскости статоров к сети энергоснабжения, улавливающие и тормозные устройства всех сосудов растормаживаются, груженные сосуды под действием магнитных сил, порождаемых бегущим магнитным полем,дви1жутся вверх, а порожние вниз, рекупе рируя электроэнергию в сеть. При под ходе груженного сосуда к разгрузочному поворотному устройству 9/ а порожнего к устройству 8 их скорости снижаются путем надвига рамы сосуда на выступы направляющих профилей (по добно профилю разгрузочной направляющей полосы в обычном разгрузочном устройстве сосудов), в результате чего ротор перемещается вертикально относительно статора, площадь магнит ного сцепления статора с ротором уменьшается и скорость плавно снижается, сосуды останавливаются в поворотных устройствах для следующей загрузки - разгрузки. Причем при подходе постоянных маг нитов к датчикам под влиянием магнит ных полей в сердечниках датчиков рез ко снижается магнитная проницаемость напряжение на втсаричных обмотках дат чика исчезает; в результате выходные реле стенцки управления срабатываюу, соответсхвенно одни контакты замыкаются, другие размыкаются; в первую очередь пакетыстаторов обесточивают ся; включается привод шибера и верхний сосуд разгружается; по завершени разгрузки шитер закрывается, а его блок контакты включают электропривод поворотных устройств: верхнего для перемещения разгрузившегося сосуда в раздел спуска порожних сосудов (разворот на 180°), а нижнего - под загрузку, при этом, пока не закончит ся загрузка нижнего сосуда, не поступит сигнал от дозировки по весу, нижний пакет линейного статора не подключится к сети потому, что приво ды поворотных верхнего и нижнего устройства соединены между собой электрическим мостом (валом) по схеме сельсинной связи. По завершению загрузки нижнего сосуда включится первый пакет линейного статора. Этот сосуд вступит в цикл подъема, а самый верхний подойдет в верхнее разгрузочное устройство и начнется новый разгрузочно-погрузочный цикл в сблокированном автоматическом режиме.
Полезное ископаемое поступает на обогатительную фабрику по конвейеру 10. Порожний сосуд опускается в синх- 6 ронном режиме - на магнитном подвесе J разность величины скольжения при движении груженных и порожних сосудов корректируется временем нахождения сосудов в поворотных устройствгис. 6i
Формула изобретения
1. Шахтный подъемник, содержащий подъемный сосуд, перемещаемый вдоль направляющих шахтного ствола, и привод подъемного сосуда, включающий в себя электродвигатель, в цепь питаВ случае обесточивания системы первым обесточивается электромагнит,установленный на каждом сосуде ,весом его сердечника освобождаются защелки или. передвигается золотник гидроили пневмостанции, и каждый сооуд под действием собственного веса зависает на направляющих проводниках, состоящих из развернутых вдоль ствола статоров (или роторов). Все описанные операции и устройства сблокированы и могут управляться автоматически с помощью оператора или ЭВМ. Если современный сосуд (склеп) полезной емкостью 50 т, общей массой порядка 80 т, сосредоточенной в одной точке, при обрыве каната (канатов) весьма трудно или практически невозможно удержать на направляющих проводниках, то в данном подъемнике названный груз может быть рассредоточен по стволу, допустим, в десяти точках, величина каждого составит 8 т, это определяет мощность каждого пакета и прочность каждого элемента системы с показателями, в десять раз меньшими по сравнению с названными, при этом скорость движения сосудов и устайовленная мощность системы могут быть значительно снижены. Кроме того, изменение скорости движения всех сосудов по стволу может осуществляться с помощью преобразователей б частоты. Использование устройства дает возможность отказа от применения копра любой конструкции с оснасткой, самой подъемной машины с редуктором и электродвигателем чрезмерно большой мощности, подъемньтх, уравновешивающих, направляющих, отбойных и тормозных канатов и других устройств и сооружеНИИ надшахтной поверхности и стволового зумпфа путем размещения развернутого вдоль ствола ротора или статора линейного электродвигателя, служащего одновременно направляющим проводником для движения подъемного сосуда и в качестве несущей конструкции тормозного устройства, на котором удерживаются сосуды в случае отключения электроэнергии и появлении других аварийных режимов в теле ротора направляющей конструкции - могут разещаться средства электроснабжения (троллей, кабели) пакетов, в которых бразуется бугущее линейное магнитное поле при электрическом уравновеивании подъемной тары в режиме рекуерации электроэнергии в сеть.
7 8569628
ния которого включены элементы ком-ный двигатель выполнен коллекторным,
нутации режимов работы, размещенныепятаеглал от постоянного тока и с ус
в верхний и нижней частях шахтноготановленным на подъемном сосуде якоствола, отличающийся тем,рем, связанным через щеточно-коллекчто, с целью упрощения конструкции,торный узел и токосъемники с тролэлектродвигатёль выполнен линейньм. ле5ши питания,
с размещенные вдоль шахтного ствола
статором и с поступательно переме- Источники информации, щакхцимся вдоль него ротором, непос-принятые во внимание при эксперти зв редственно связаниьол с подземным сосудом. Авторское свидетельство СССР
2. Шахтный подъемник по п. 1,о т- - щ 60585, кл, В 66 D 5/30,
личающийся тем, что линей-1939.
lemMviw мм&шя
1
-л
.Cj
v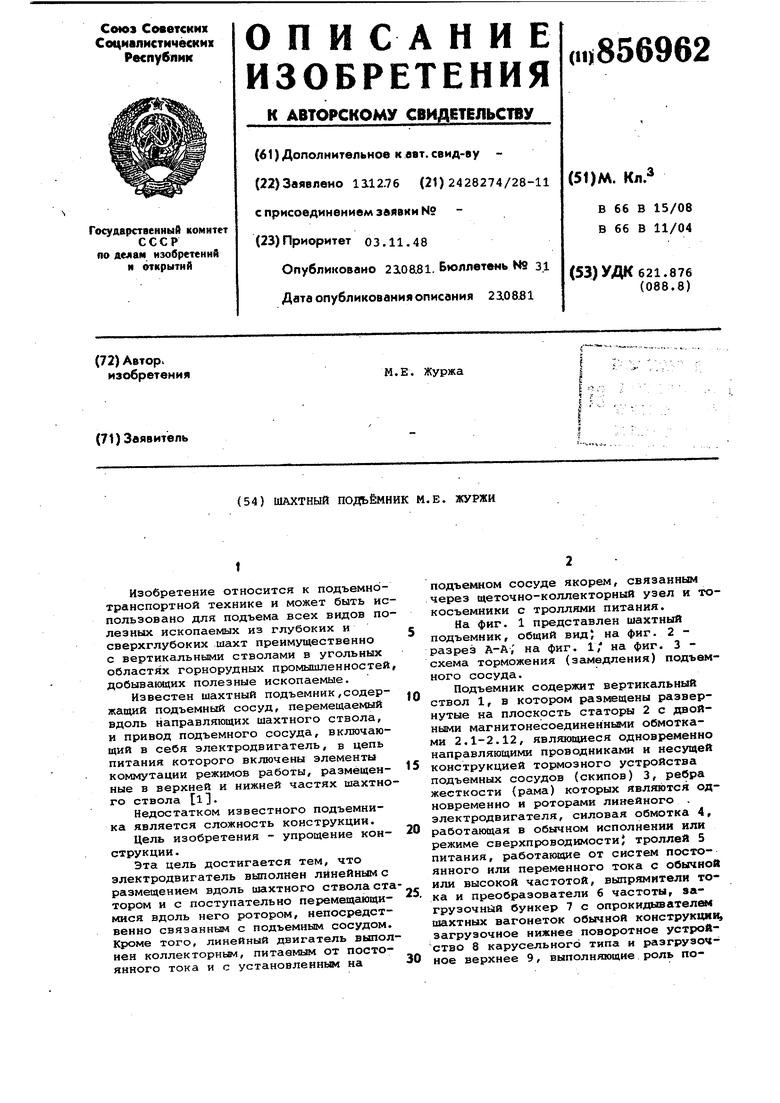

| название | год | авторы | номер документа |
|---|---|---|---|
| ШАХТНЫЙ ПОДЪЕМНИК | 1991 |
|
RU2035375C1 |
| Шахтный пневматический подъемник | 1980 |
|
SU1164188A1 |
| Подъемная установка | 1990 |
|
SU1782906A1 |
| Шахтная подъемная установка | 1990 |
|
SU1791318A1 |
| СПОСОБ ВЗВЕШИВАНИЯ ПОЛЕЗНОГО ГРУЗА В ПОДЪЕМНОМ СОСУДЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2124468C1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ НАПУСКА ТЯГОВЫХ КАНАТОВ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ | 1992 |
|
RU2061643C1 |
| ШАХТНАЯ ОДНОКАНАТНАЯ ПОДЪЕМНАЯ УСТАНОВКА | 2011 |
|
RU2480395C2 |
| ЛИФТ | 1988 |
|
RU2110467C1 |
| СКИПОВАЯ ПНЕВМОПОДЪЁМНАЯ УСТАНОВКА | 2017 |
|
RU2667430C1 |
| ПНЕВМАТИЧЕСКИЙ ПОДЪЕМНИК | 1992 |
|
RU2081327C1 |