Изобретение относится к подъемно-транспортному машиностроению, подъемникам и выемочно-погрузочным машинам, предназначенным для перемещения грузов, разработки и погрузки в транспортные средства или отвал полезных ископаемых, может быть использовано для задания силы натяжения гибкого элемента, сматываемого с барабана.
Проблема поддержания силы натяжения гибкого элемента с требуемой точностью актуальна для машин и оборудования, на которых требуется контролировать нагрузки на тяговые органы. С этой целью используются различные, более или менее эффективные и точные, способы и устройства.
Известно натяжное устройство канатовьющей машины (Патент RU №2271982, МПК В65Н 59/16, опубл. 2006.06.20), содержащее электромагнитную катушку и тормоз, выполненный в виде двух дисков, между которыми размещен железный порошок. На одном из дисков установлены кольцевые магниты, а другой диск является прижимным. Постоянное натяжение каната достигается использованием центробежного регулятора, кинематически связанного с сердечниками кольцевых магнитов и за счет изменения тормозного момента.
Известно механическое устройство постоянного натяжения канатов (Заявка WO 2005012036, МПК А63В 29/02, опубл. 2005.02.10), которое представляет собой плоский удлиненный корпус, концы которого выполнены в виде крюков, а в центре установлен зажим. Натяжной канат фиксируется крюком одного конца устройства натяжения и протягивается через крюк другого конца и зажим, образуя петлю, которая с помощью шпильки может менять свои размеры, таким образом натяжение канатов поддерживается постоянным. Использование такого устройства возможно только для гибких канатов и требует ручного регулирования.
В качестве прототипа было выбрано подъемное устройство с системой регулирования натяжения канатов (WO 2006038299 МПК В66В 11/08, опубл. 2006.04.13), содержащее тяговые и возвратные канаты, направляющие элементы движения канатов в виде блоков, корпус, направляющую движения корпуса, датчик натяжения канатов и гидравлическую систему компенсации, поддерживающую постоянным соотношение натяжений возвратных и тяговых канатов.
Гидравлическая система компенсации позволяет поддерживать постоянным натяжение канатов, но установлена так, что работает такой подъемник только вертикально, перемещать груз под углом или в горизонтальном направлении, с его помощью невозможно.
Технической задачей предлагаемого изобретения является обеспечение постоянного натяжения тяговых и возвратных канатов посредством автоматического перераспределения их длины.
Задача решается устройством автоматического регулирования натяжения канатов рабочего оборудования карьерного экскаватора, которое содержит тяговые и возвратные канаты, направляющие элементы движения канатов и гидравлическую систему компенсации. Направляющие элементы движения канатов выполнены в виде тягового и возвратного полублоков, которые установлены с возможностью перемещения в плоскости движения соответствующих канатов. Гидравлическая система компенсации содержит пары тяговых и возвратных гидроцилиндров, соединенных гидросистемой с обратным и предохранительным клапанами, причем корпусы гидроцилиндров жестко установлены на рукояти, а штоки соединены с соответствующим каждой паре гидроцилиндров полублоком.
Отношение диаметров возвратных к диаметрам тяговых гидроцилиндров больше единицы.
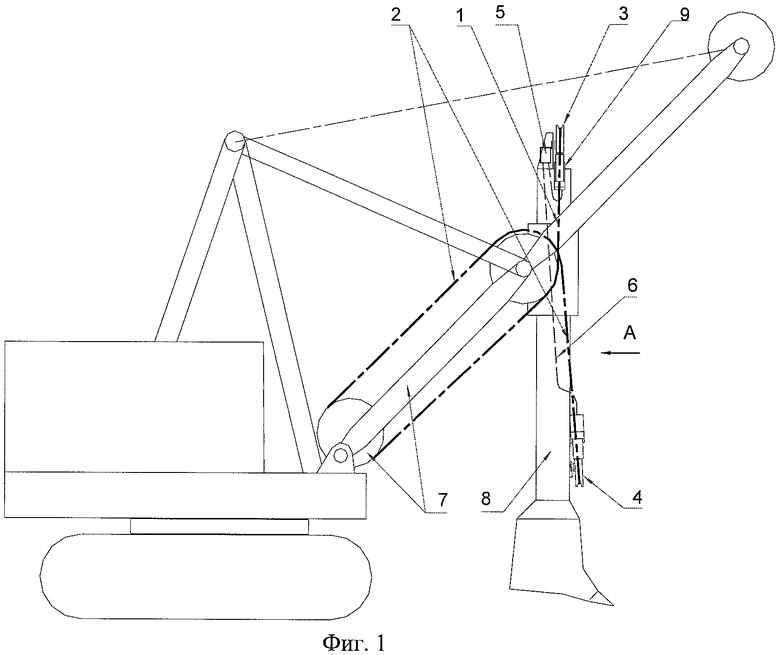
На фиг.1 представлен общий вид рабочего оборудования экскаватора;
фиг.2 - гидравлическая система компенсации.
Устройство содержит (фиг.1) тяговые канаты 1, возвратные канаты 2, тяговый полублок 3, возвратный полублок 4, гидравлическую аппаратуру 5, гидропровод 6. Канаты 1 и 2 запасованы через тяговый 3 и возвратный 4 полублоки, наружные и внутренние ручьи, соответственно, двухручьевых блоков (на фигурах не показаны) на барабаны напорной лебедки 7. На рукояти 8 установлены тяговые гидроцилиндры 9 и возвратные гидроцилиндры 10. Штоки гидроцилиндров 9 соединены с полублоком 3, а штоки гидроцилиндров 10 соединены с полублоком 4, что дает возможность, перемещая полублоки вдоль рукояти, менять длину канатов 1 и 2.
Гидравлическая система компенсации (фиг.2) кроме гидроцилиндров, тяговых 9 и возвратных 10, поршневые полости которых соединены гидропроводом 6, содержит обратный клапан 11 и предохранительный клапан 12, вентиль 13, поршневые полости гидроцилиндров 9 и 10.
Регулирование натяжения канатов осуществляется в процессе работы экскаватора следующим образом. При опускании рукояти 8 (фиг.1) ее вес с весом ковша передается на возвратный полублок 4. Канаты 2 натягиваются, полублок 4 поднимается и перемещает штоки гидроцилиндров 10. Давление в полостях гидроцилиндров 4 увеличивается и через гидропровод 6 передается на обратный клапан 11. Если в этот момент тяговые канаты 1 ослаблены, то в тяговых гидроцилиндрах 9 давления нет и в них через обратный клапан 11 поступает гидравлическая жидкость. В полости гидроцилиндров 9 увеличивается давление, штоки гидроцилиндров 9 перемещаются вместе с тяговым полублоком 3, а так как диаметр гидроцилиндров 10 больше диаметра гидроцилиндров 9, то перемещение полублока 3 будет больше перемещения полублока 4. Таким образом, перемещая полублоки 3 и 4 вдоль рукояти 8, можно перераспределять длины тяговых 1 и возвратных 2 канатов на величину, пропорциональную разности квадратов диаметров гидроцилиндров. Обратный клапан 11 открыт до момента выравнивания давления в тяговых (9) и возвратных (10) гидроцилиндрах. Если натяжение канатов 1 и 2 по каким-то причинам превышает заданное, то гидравлическая жидкость из соответствующих гидроцилиндров сбрасывается через предохранительный клапан 12. При этом расстояние между полублоками 3 и 4 уменьшается и натяжение канатов ослабевает.
Таким образом, устройство позволяет поддерживать постоянным натяжение тяговых и возвратных канатов и снизить динамические нагрузки на рабочее оборудование выемочно-погрузочных машин и подъемников, увеличить срок службы канатов, а также ручьев блоков и барабанов лебедки.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ КАНАТОВ КАРЬЕРНОГО ЭКСКАВАТОРА | 2018 |
|
RU2680943C1 |
| Рабочее оборудование экскаватора | 1983 |
|
SU1104207A1 |
| Рабочее оборудование экскаватора | 1990 |
|
SU1756467A1 |
| ПРИВОД НАПОРА КАРЬЕРНОГО ЭКСКАВАТОРА | 2015 |
|
RU2631062C2 |
| Рукоять экскаватора с канатным механизмом напора | 1990 |
|
SU1788997A3 |
| ТЯГОВОЕ ОБОРУДОВАНИЕ БРОНИРОВАННОЙ РЕМОНТНО-ЭВАКУАЦИОННОЙ МАШИНЫ И ГИДРАВЛИЧЕСКАЯ СИСТЕМА ПРИВОДА ЛЕБЕДКИ ТЯГОВОГО ОБОРУДОВАНИЯ | 2009 |
|
RU2408525C1 |
| Экскаватор-драглайн | 1989 |
|
SU1810426A1 |
| КАНАТНЫЙ РАБОЧИЙ МЕХАНИЗМ ЭКСКАВАТОРА | 1971 |
|
SU313449A1 |
| Рабочее оборудование экскаватора-драглайна | 1989 |
|
SU1666650A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 2010 |
|
RU2450106C1 |
Изобретение относится к устройству автоматического регулирования натяжения гибкого элемента в машинах и механизмах в подъемно-транспортном машиностроении. Устройство содержит тяговые и возвратные канаты, тяговый полублок (3), возвратный полублок (4) и гидравлическую систему компенсации. Гидравлическая система компенсации содержит установленные на рукояти тяговые (9) и возвратные (10) гидроцилиндры, поршневые полости которых соединены гидропроводом (6), обратный клапан (11) и предохранительный клапан (12), вентиль (13). Тяговые и возвратные канаты запасованы через тяговый (3) и возвратный (4) полублоки, наружные и внутренние ручьи двухручьевых блоков на барабаны напорной лебедки. Штоки гидроцилиндров (9) соединены с полублоком (3), а штоки гидроцилиндров (10) соединены с полублоком (4), что дает возможность, перемещая полублоки вдоль рукояти, менять длину тяговых и возвратных канатов. Отношение диаметров возвратных к диаметрам тяговых гидроцилиндров больше единицы. Достигаются снижение динамических нагрузок на рабочее оборудование, увеличение срока службы канатов, ручьев блоков и барабанов лебедки. 2 ил.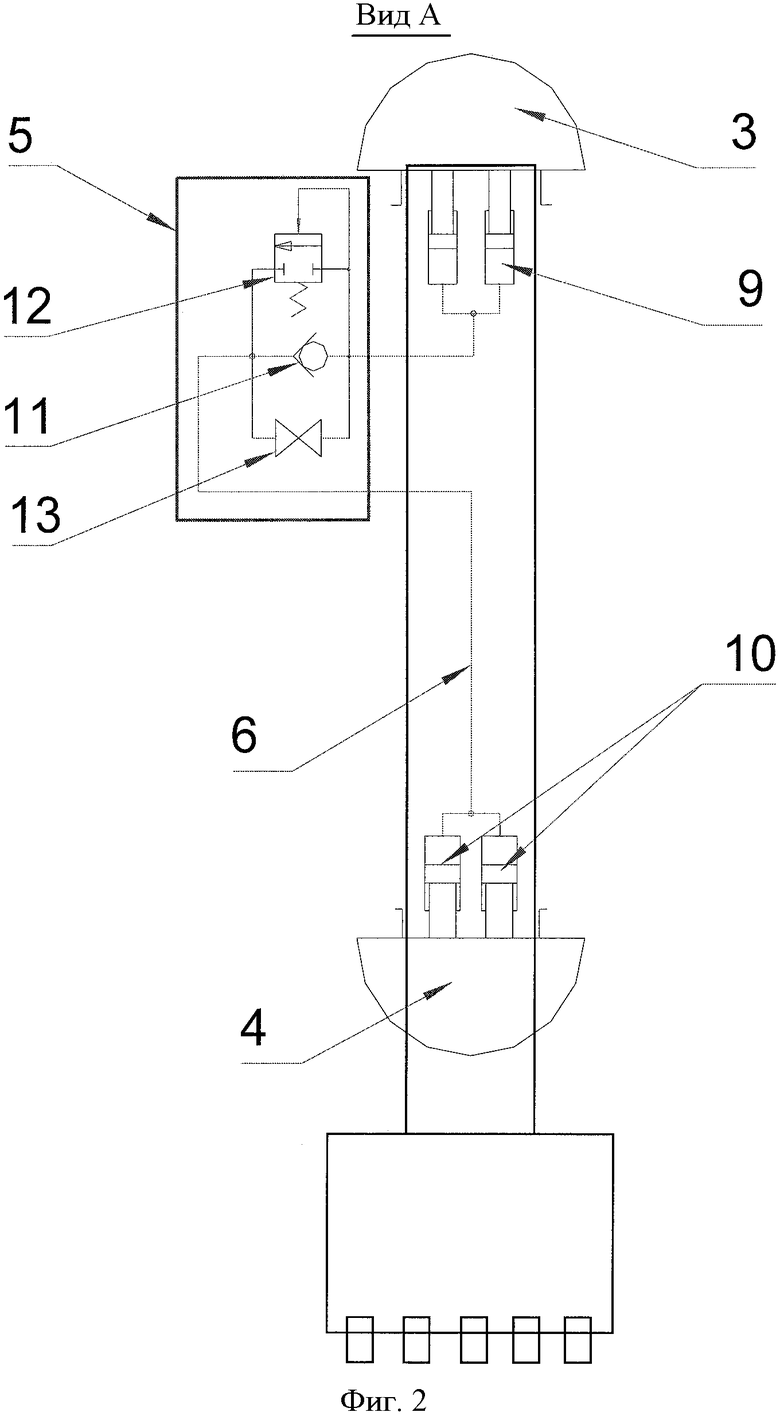
Устройство автоматического регулирования натяжения канатов карьерного экскаватора, содержащее тяговые и возвратные канаты, направляющие элементы движения канатов и гидравлическую систему компенсации, отличающееся тем, что направляющие элементы движения канатов выполнены в виде тягового и возвратного полублоков, установленных с возможностью перемещения в плоскости движения соответствующих канатов; гидравлическая система компенсации содержит пары тяговых и возвратных гидроцилиндров, соединенных гидросистемой с обратным и предохранительным клапанами, причем корпусы гидроцилиндров жестко установлены на рукояти, а штоки соединены с соответствующим каждой паре гидроцилиндров полублоком, причем отношение диаметров возвратных гидроцилиндров к диаметрам тяговых гидроцилиндров больше единицы.
| WO 2006038299 A1, 13.04.2006 | |||
| Рабочее оборудование карьерного экскаватора-драглайна | 1989 |
|
SU1668571A1 |
| НАТЯЖНОЕ УСТРОЙСТВО ВЫНЕСЕННЫХ МЕХАНИЗМОВ ПОДАЧИ ГОРНОДОБЫВАЮЩИХ МАШИН | 0 |
|
SU298744A1 |
| RU 2002123973 A, 20.03.2004. | |||

