которых состоит из двух однокомпонентньах преобразователей, оси преобразователей двух блоков датчиков параллельны между собой и перпендикулярны базовой оси, проходящей через центры этих преобразователей, оси преобразователей третьего блока датчиков соосны с базовой осью, проходящей через центры этих преобразователей, три детектора, два первых входа каждого из которых подключены к выходам магнитометрич еских преобразователей и ко входу коммутации каждого синхронного детектора, и регистрирующее устройство,входы которого подключены к выходам всех синхронных детекторов. Базовые оси всех преобразователей соосны, а оси преобразователей трех датчиков расположены в трех взаимно ортогональных плоскостях 21
Преобразователи в известном устройстве реагируют Только на проекцию вектора магнитной индукции на свою ось, и расположены так, что каждые три из упомянутых преобразователей занимают минимальный конструктивно допустимый объем пространства. Такое расположение преобразователей датчиков приводит к взаимному влиянию магнитного поля одного преобразователя на другие, что вызывает в них ложный сигнал, являющийся дополнительной погрешностью при измерении пространственных производных вектора магнитной индукции. Увеличение же расстояния между магнитометрическими преобразователями приводит к ухудшению разрешающей способности устройства, а значит, и к снижению точности измерения.
Целью изобретения является точности измерения параметров неоднородности магнитного поля.
Цель достигается тем, что -в устройство , содержащее жесткое немагнитное основание с расположеннЕлми на нем тремя блоками градиентометрических.датчиков/ каждый из которых состоит из двух однокомпонентных магнитометрических преобразователей,оси магнитометрических преобразователей Одного из упомянутых блоков параллельны между собой и перпендикулярны базовой оси, проходящей.через центры этих пpeoбpaзoвaтeheй,ocи магнитом трических преобразователей второго блока параллельны друг другу и перпе|1дикулярны базовой оси, проходящей через центры этих преобразователей, оси магнитомётрг ческих преобразователей :третьего блока соосны с базовой осью, проходящей через центры этих преобразователей, три синхронных детектора, два первые входа каждого из которых подключены к выходам магнитометрических преобразователей одного из блоков градиентометрических датчиков, генератор
переменного тока, выходы которого подключены цо входам магнитометрических преобразователей и ко входу коммутаций каждого синхронного детектора, и регистрирующий прибор, входы которого подклю чены к выходам всех синхронных детекторов, базовые оси магнитометрических преобразователей взаимшо-ортогональны, магнитометрические преобразователи первого и второго блоков градиентрметричес.- ких датчиков параллельны базовой оси третьего блока градиентомехрических датчиков, а магнитометрические преобразователи каждого блока расположены на одинаковом расстоянии от точки пересечения базовых осей.
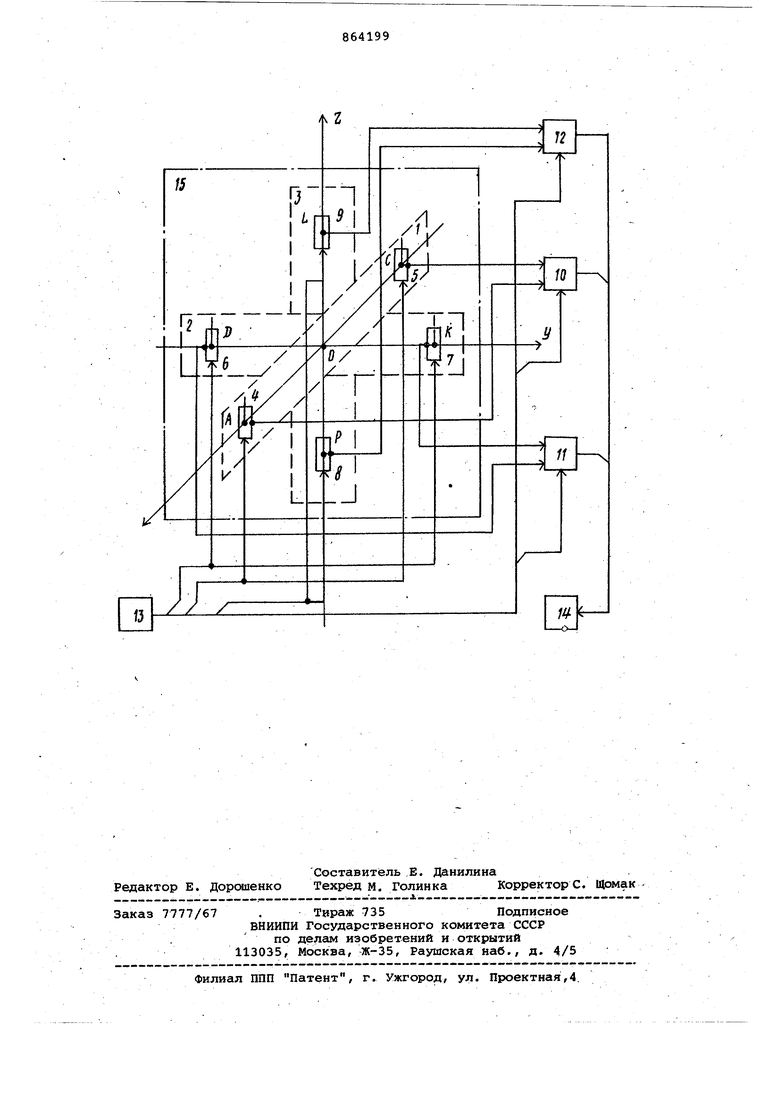
На чертеже изображена структурная схема устройства для измерения параметров неоднородности Магнитного поля.
Устройство содержит три блока градиентометрических датчиков 1,2 и 3, каждый из которых состоит из двух однокомпонентных магнитометрических преобразователей 4 и 5, 6 и 7, 8 и 9, три синхронных детектора 10, 11 и 12, генератор тока 13, выходы которого подключены ко входам преобразователей 4, 5, б, 7, 8 и 9 и входам коммутации синхронных детекторов 10, 11 и 12, регистрирующий прибор 14, входы которого подключены к выходам детекторов 10, 11 и 12, и жесткое немагнитное основание 15, на котором расположены блоки градиентометрических датчиков 1,2 и 3„ Оси преобразователей 4 и 5 параллельны между собой и перпендикулярны базовой оси АС, проходящей через центры этих преобразователей А и С. Оси преобразователей 6 и 7 параллельны друг другу и перпендикулярны базовой оси DK, проходящей через центры этих преобразователей D и J. Оси преобразователей 8 и 9 соосны с баг зовой осью LP, проходящей через центры этих преобразователей L и Р. Блоки градиентометрических датчиков 1, 2 и 3 ус;тано лен так, что их Вазовые оси АС, DK и ТР взаимно ортогональны, а оси преобразователей 4,5,6,7,8 и 9 параллельны базовой оси ГР. Преобразователи 4,5,6,7,8 и 9 блоков граднентометрических датчик Ьв 1,2 и 3 расположены на одинаковых расстояниях от точки пересече1ния О базовых осей АС, DK и ЧР блоков градиентометрических датчиков 1, 2 и 3, т.е. , ,. Каждая базовая ось , ОК и LP направлена вдоль одной из осей бХ, OY, OZ прямоугольной пространственной системы координат. При этом ось
О т АС направлена вдоль оси ОХ, ось DK вдоль оси OY и ось rF - вдоль оси OZI
Устройство работает следующим образом. Каждый преобразователь 4,5,6,7,8 ,и 9 реагирует только на проекцию вектора магнитной индукции на двою ось. С выходов преобразователей 4 и 5, 6 и 7, 8 и 9 блоков грациентомет рических датчиков 1, 2 и 3 поступаю сигналы на первые входы синхронных детекторов 10, 11 и 12, пропорциональные разностям проекций магнитны индукций на оси,упомянутых преобразователей. Так как расстояние между преобразователями 4, 5,6,7,8 и 9 постоянно, то на входы синхронных д текторов 10, 11 и 12 поступают сигн лы, пропорциональные трем пространс венным производным вектора магнитно индукции. Так на вход детектора 10 поступа ет сигнал пропорциональный )на вход детектора 11 поступает сигнал пропорциональный -;- и на о вход детектора 12 поступает сигнал, - - пропорцио н аль ный Э% о: Jbz пространственные производные до. вектора магнитной индукции. Генератор тока 13 осуществляет возбуждени магниточувствительных -элементов пре образователей 4,5,6,7,8 и 9и коммутацию детекторов 10, 11 и 12. Про детектированные сигналы с детекторов.10, 11 и 12 поступают на входы регистрирующего прибора 14. В одно;родной и изотропной среде(М cons не содержащей токов, rot , где . В - вектор Магнитной индукции. В таком случае, выполняется равенство следующих пространственных производ ных.. .2L.-M ав ч/ э 6 а 3ftx aftэу эх эZ ду dz Эк Следовательно, устройством можно измерять пространственные производные, равные пространственным производным, которые измеряют известным устройством. Однако по сравнению с известным устройством точность из- мерения параметров неоднородности ма нйтного поля данным устройством выше. Повышение точности измерения . устройством достигнуто за счет того, что все преобразователи разнесены в пространстве на значительные расстояния, превышающие в несколько раз максимальные линейные размеры самих преобразователей. Такое расцол жение магнитометрических преобразователей на жестком немагнитном основании практически исключает вэаимное влияние магнитного поля одного магнитометрического преобразователя на другое, а следовательно, ослабляет на несколько порядков ложный сигнал, обус гювленный упомянутым взаимным влиянием, что обеспечивает повышение точности измерения параметров неоднородности магнитного поля по сравнению с известным устройством. Формула изобретения Устройство для измерения параметров неоднорогности магнитного поля, содержащее жесткое немагнитное основание с расположенными на нем тремя блоками градиентометрических датчи- ков,кажд5лй из которых состоит из двух; однокомпонентных магнитометрических преобразователей, оси магнитометрических преобразователей одного из упомянутых блоков параллельны между собой к перпендикулярны- базовой оси, проходящей через центры этих преобразователей, оси магнитометрических преобразователей второго блока параллельны друг другу и перпендикулярны базовой оси, проходящей через центры этих преобразователей, оси магнитометрических преобразователей третьего блока соосны с базовой осью, проходящей через центры этих преобразователей, три синхронных детектора, два первые входа каждого из которых подключены к выходам магнитометрических преобразователей одного из блоков градиентометрических датчиков, генератор переменного тока, выходы которого подключены ко входам магнитометрических преобразователей и ко входу коммутации каждого синхронного-детектора, и регистрирующий прибор, входы которого подключены к выходам всех синхронных детекторов, отличающееся тем, что, с целью повышения точности, базовые оси магнитометрических преобразователей взаимно ортогональны, магнитометрические преобразователи первого и второго блоков градиентометрическнх датчиков параллельны базовой оси третьего блока градиентометрических датчиков , а магнитометрические преобразователи каждого блокд расположены -на одинаковом расстоянии от. точки пересечения базовых осей. Источники информации, принятые во внимание при экспертизе 1.Ю.В. Афанасьев Феррозонды, Л., Энергия, с. 127-135. 2.Заявка Великобритании №1421365, кл. G 01 R 29/08,1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| Градиентометр | 1979 |
|
SU1095117A2 |
| Градиентометр | 1978 |
|
SU789949A1 |
| Градиентометрический блок градиентометра | 1983 |
|
SU1221623A1 |
| Способ определения магнитного момента дипольного источника поля и координат этого источника | 1985 |
|
SU1322208A1 |
| ИНКЛИНОМЕТР | 2003 |
|
RU2247942C1 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ С ВОЗМОЖНОСТЬЮ КАЛИБРОВКИ В ПОЛЕВЫХ УСЛОВИЯХ | 2016 |
|
RU2620326C1 |
| МАГНИТОМЕТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ТЕЛА (ЕГО ВАРИАНТЫ) | 1996 |
|
RU2130619C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ИНДУКЦИИ ГЕОМАГНИТНОГО ПОЛЯ С ПОДВИЖНОГО ОБЪЕКТА | 2003 |
|
RU2236029C1 |
| МАГНИТОМЕТР (ВАРИАНТЫ) | 1994 |
|
RU2124736C1 |
| Устройство для измерения компонент вектора магнитной индукциии | 1974 |
|
SU532066A1 |