Изобретение относится к измерительной технике и может быть использовано для определения магнитного дипольного источника поля и кoopдинaY этого источника, например в геофизике для проведения магнито- разведочных работ, в судостроительной промышленности для обеспечения навигационного оборудования, в медицине для диагностики и лечения и т.д.
Цель изобретения - повьппение точности определения магнитного момента дипольного источника поля и координат этого источника.
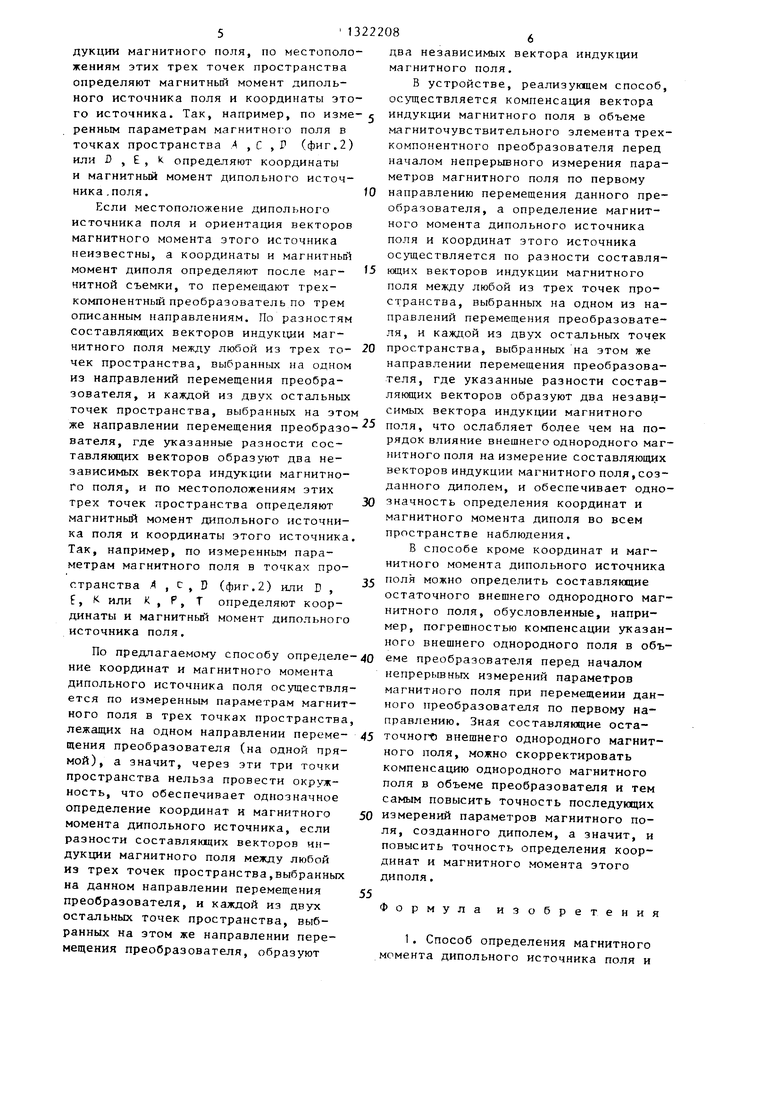
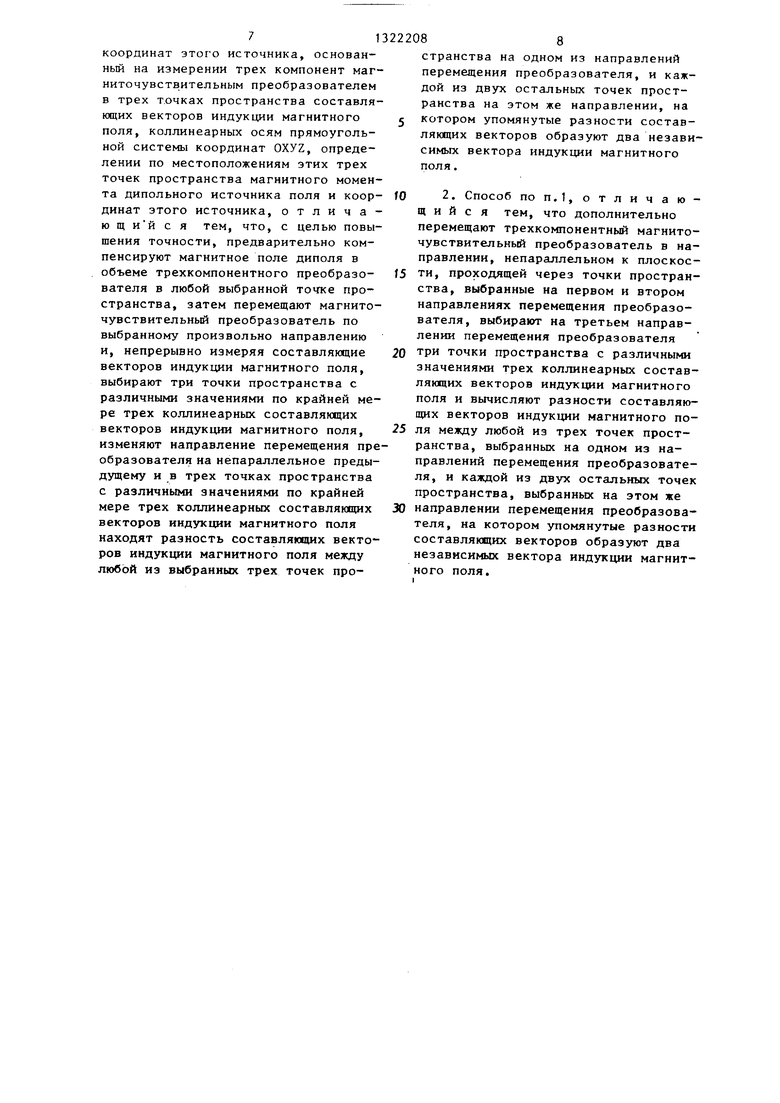
На фиг. 1 изображена структурная схема устройства, реализующего способ определения магнитного момента дипольного источника поля и координат этого источника; на фиг. 2 - три направления перемещения трехкомпонент- ного магниточувствительного преобразователя и Точки пространства на, каждом из этих направлений.
Устройство (фиг. 1) состоит из трехкомпонентного магниточувствительного преобразователя 1, местоположение которого известно в прямоугольной системе координат OXYZ, усилительно-преобразовательного блока 2,
fO
В результате этого на выходе магнитометрического преобразователя 1 появляются три ЭДС второй гармоники,каждая из которых пропорциональна одной из трех составляющих вектора индукции магнитного поля, созданного магнитным моментом диполя и однородным магнитным полем, например геомагнитным. Выходные сигналы с магнитометрического преобразователя 1 усиливаются и детектируются в усилительно-преобразовательном блоке 2, который состоит из трех избирательных усилителей, трех синхронных детекторов и трех интеграторов, поэтому выходные сигналы с блока 2 пропорциональны трем составляющим вектора индукции магнитного поля. Сигналы с выхода этого блока поступают на вход блока 4 коммутации, предназначенного для коммутации сигналов, поступающих с блока 2 на вход блока 5. Через блок 4 сигналы с блока 2 поступают на вход блока 6. При перемещении преобразова- 25 теля 1, расположенного на подвижной платформе 9, по выбранному произвольно направлению от точки А (фиг.2) к точке с , подключают предварительно в точке д блок 5 (фиг.1) через блок
15 Ч
20
генератора 3 переменной ЭДС, блока 4 к выходу блока 2. В блоке 5 созда- коммутации, блока 5 обратной связиются сигналы, обеспечивающие воспро- по измеряемому магнитному полю, бло-изведение в объеме преобразователя 1 ка 6 выделения составляющих векторавектора индукции магнитного поля,со- индукции магнитного поля, регистрато-ставлякщие которого равны по величи- ра 7, вычислительного блока 8 и под- о противоположны по направлению вижной стабилизированной платформы 9, на которой установлен преобразователь 1. Первые входы преобразователя 1 и блока 2 подключены к выходу генератора 3 переменной ЭДС. Второй вход бло-40в объеме магнитометрического преобра- ка 2 подключен к выходу преобразова-зователя 1 выходные сигналы с блоков
составляющим вектора индукции магнитного поля, измеренным магнитометрическим преобразователем 1. При компенсации измеряемого магнитного поля
теля 1, а выход - к входу блока 4 коммутации, выходы которого подключены к входам блока 5 обратной связи
2 и 4 равны нулю. Тогда блок 5 отключают от выхода блока 2 с помощью блока 4 коммутации. При этом на входе
и блока 6 выделения составлякщих.Вы- 45 блока 5 иммитируется нулевой сигнал, ход блока 5 подключен к первому входу что обеспечивает запоминание сигна- регистратора 7 и к второму входу преобразователя 1. Первый выход блока 6
лов в блоке 5, компенсирующих магнитное поле в объеме преобразователя 1 в точке Л(фиг.2). Блок 5 (фиг.1) второму входу регистратора 7, а вто- 50 состоит из трех узлов, при этом кажвыделения составляющих подключен к
рой выход - к вычислительному ку 8.
блоСпособ реализуется следующим образом.
На первый вход магниточувствительного преобразователя 1 (фиг.1) подается с генератора 3 переменная ЭДС, возбуждающая данный преобразователь.
В результате этого на выходе магнитометрического преобразователя 1 появляются три ЭДС второй гармоники,каждая из которых пропорциональна одной из трех составляющих вектора индукции магнитного поля, созданного магнитным моментом диполя и однородным магнитным полем, например геомагнитным. Выходные сигналы с магнитометрического преобразователя 1 усиливаются и детектируются в усилительно-преобразовательном блоке 2, который состоит из трех избирательных усилителей, трех синхронных детекторов и трех интеграторов, поэтому выходные сигналы с блока 2 пропорциональны трем составляющим вектора индукции магнитного поля. Сигналы с выхода этого блока поступают на вход блока 4 коммутации, предназначенного для коммутации сигналов, поступающих с блока 2 на вход блока 5. Через блок 4 сигналы с блока 2 поступают на вход блока 6. При перемещении преобразова- 5 теля 1, расположенного на подвижной платформе 9, по выбранному произвольно направлению от точки А (фиг.2) к точке с , подключают предварительно в точке д блок 5 (фиг.1) через блок
5 Ч
0
к выходу блока 2. В блоке 5 созда- ются сигналы, обеспечивающие воспро- изведение в объеме преобразователя 1 вектора индукции магнитного поля,со- ставлякщие которого равны по величи- е о противоположны по направлению в объеме магнитометрического преобра- зователя 1 выходные сигналы с блоков
составляющим вектора индукции магнитного поля, измеренным магнитометрическим преобразователем 1. При компенсации измеряемого магнитного поля
2 и 4 равны нулю. Тогда блок 5 отключают от выхода блока 2 с помощью блока 4 коммутации. При этом на входе
дьй узел состоит из порогового устройства, генератора тактовых импульсов, реверсивного счетчика и цифро- аналогового преобразователя. После 55 отключения блока 5 от блока 2 сигналы, nocTynaKxafie на вход блока 6,пропорциональны составляющим векторов индукции магнитного поля, созданных диполем, например, в точках пространства ,с,о,Е ,к, Р,т (фиг.2) на трех направ;:ениях перемещения трехкомпонентного преобразователя.
Определение магнитного момента дипольного источника поля и координат этого источника осуществляется следующим образом.
При перемещении трехкомпонентного магнитометрического преобразователя 1 по первому направлению определяют три точки пространства, например А , с, D (фиг. 2) с различны(и значениями по крайней мере трех колликеарных составляющих векторов индук1Ц1и магнитного поля. При этом, если разности составляющих векторов индукции магнитного поля, например, между точками /4 и С , Л и Е образуют два вектора 5. - 5с и ;d3
- В
,D
Г
между которыми угол боль-
о
/)
ше нуля, }1о не равен +180 , т.е. векторы индукции магнитного поля йй
и независимы, то определение
магнитного момента дипольного источ- ника поля и координат этого источника осуществляется с помощью блока 8 (фиг.1) по составляющим векторов й.
и
ЛЕ. (Вд, В
с
5.векторы инлс
дукции магнитного поля в соответствующих точках пространства А , С. , D )
и местоположениям точек пространства
Л, С , D (фиг.2).
I
и 4В,
Если векторы
АС
АИ
зависимы, то изменяют направление перемещения преобразователя на угол 0 180 (фиг,2) от предьщущего направления и определяют на втором направлении перемещения три точки пространства, например D , Е , ; с различными значениями по крайней мере трех коллинеарных составляющих векторов индукции магнитного поля. При этом, если разности составляющих векторов индукции магнитного поля, например, между точками D и J , Е и k образуют два вектора
и ЛВе„ ffc - между ко
- . ЕЕ BD
- Bg и л в ЕЦ Bg В, торыми угол больще нуля, но не равен + 180°, т.е. векторы BDE Ек независимы, то определение магнитного момента дипольного источника поля и координат этого источника осуществляют с помощью блока 8 (фиг.1) по составляющим векторов ЛВ и лВ
(В
и
к векторы индукции магнитного поля в соответствующих точках пространства и к) и местоположениям точек пространства D ,Е , к
fO
f5
20
25
30
35
40
45
50 „
(фиг.2). Каждая пара векторов
и В.
а,
АС
лв DS F одновременно зависимы лишь в том случае, когда диполь расположен в плоскости, проходящей через точки пространства Л,с ,D , Е, и ) (фиг.1), а вектор магнитного момента данного диполя перпендикулярен этой плоскости. В таком случае для определения магнитного момента дипольного источника поля и координат этого источника дополнительно перемещают преобразователь в направлении под углом О
Р 180° к плоскости, проходящей через точки пространства Л, с , D,
Е и К , выбранные на первом и втором направлениях перемещения преобразователя. Определяют на третьем направлении перемещения преобразователя три точки пространства, например 1 , Р , Т с различными значениями по крайней мере трех коллинеарных составляющих векторов индукции магнитного поля, а затем по разностям составляющих векторов индукции магнитного поля, например, между точками К ИР,Кит и местоположениям этих точек определяют координаты и магнитный момент дипольного источника поля с помощью блока 8 (фиг.1).
В некоторых случаях, например при аэромагнитной съемке, когда известно, что источник магнитного поля находится вне плоскости перемещения преобразователя по выбранным первым двум направлениям или когда вектор магнитного момента дипольного источника поля, расположенного в плоскости измерения параметров магнитного поля преобразователем по первому и второму направлениям перемещения этого преобразователя, не перпендикулярен упомянутой плоскости, а координаты и магнитный момент дипольного источника поля определяют после магнитной съемки, то перемещают данный преобразователь по выбранным ранее первым двум направлениям. По разностям сос- тавляю1цих векторов индукции магнитного поля между любой из трех выбранных ранее точек пространства на одном из двух первых направлений перемещения преобразователя и каждой из двух остальных точек пространства, выбранных на этом же направлении перемещения данного преобразователя, где упомянутые разности составляющих векторов образуют два независимых вектора инto
дукции магнитного поля, по местоположениям этих трех точек пространства определяют магнитный момент диполь- ного источника поля и координаты этого источника. Так, например, по изме- ренным параметрам магнитного поля в точках пространства 4 , С ,Г (фиг.2) или D , , tc определяют координаты и магнитный момент дипольного источника .поля.
Если местоположение ДИПОЛРЖОГО источника поля и ориентация векторов магнитного момента этого источника неизвестны, а координаты и магнитный момент диполя определяют после магнитной съемки, то перемещают трех- компонентный преобразователь по трем описанным направлениям. По разностям составлякяцих векторов индукции магнитного поля между любой из трех точек пространства, выбранных на одном из направлений перемещения преобразователя, и каждой из двух остальных точек пространства, выбранных на этом
15
20
два независимых вектора индукции магнитного поля,
В устройстве, реализугацем способ, осуществляется компенсация вектора индукции магнитного поля в объеме магниточувствительного элемента трек- компонентного преобразователя перед началом непрерывного измерения параметров магнитного поля по первому направлению перемещения данного преобразователя, а определение магнитного момента дипольного источника поля и координат этого источника осуществляется по разности составляющих векторов индукции магнитного поля между любой из трех точек пространства, выбранных на одном из направлений перемещения преобразователя, и каждой из двух остальных точек пространства, выбранных на этом же направлении перемещения преобразователя, где указанные разности составляющих векторов образуют два независимых вектора индукции магнитного
же направлении перемещения преобразо-- - поля, что ослабляет более чем на порядок влияние внешнего однородного магнитного поля на измерение составляющих векторов индукции магнитного поля,созданного диполем, и обеспечивает одно- 30 значность определения координат и магнитного момента диполя во всем пространстве наблюдения.
В способе кроме координат и ма:- нитного момента дипольного источника j поля можно определить составляющие остаточного внешнего однородного магнитного поля, обусловленные, например, погрешностью компенсации указанного внешнего однородного поля в объ- По предлагаемому способу определе- О еме преобразователя перед началом ние координат и магнитного момента дипольного источника поля осуществляется по измеренным параметрам магнитного поля в трех точках пространства.
вателя, где указанные разности сос- тавлякнцих векторов образуют два независимых вектора индукции магнитного поля, и по местоположениям этих трех точек пространства определяют магнитный момент дипольного источника поля и координаты этого источника. Так, например, по измеренным параметрам магнитного поля в точках пространства А , с , D (фиг.2) или D , Е, К. или , , Т определяют координаты и магнитный момент дипольного источника поля.
непрерывных измерении параметров магнитного поля при перемещении данного преобразователя по первому направлению. Зная составляющие осталежащих на одном направлении перемещения преобразователя (на одной прямой), а значит, через эти три точки пространства нельза провести окружность, что обеспечивает однозначное определение координат и магнитного момента дипольного источника, если разности составляющих векторов индукции магнитного поля между любой из трех точек пространства,выбранных на данном направлении перемещения преобразователя, и каждой из двух остальных точек пространства, выбранных на этом же направлении перемещения преобразователя, образуют
два независимых вектора индукции магнитного поля,
В устройстве, реализугацем способ, осуществляется компенсация вектора индукции магнитного поля в объеме магниточувствительного элемента трек- компонентного преобразователя перед началом непрерывного измерения параметров магнитного поля по первому направлению перемещения данного преобразователя, а определение магнитного момента дипольного источника поля и координат этого источника осуществляется по разности составляющих векторов индукции магнитного поля между любой из трех точек пространства, выбранных на одном из направлений перемещения преобразователя, и каждой из двух остальных точек пространства, выбранных на этом же направлении перемещения преобразователя, где указанные разности составВ способе кроме координат и ма:- нитного момента дипольного источника поля можно определить составляющие остаточного внешнего однородного магнитного поля, обусловленные, например, погрешностью компенсации указанного внешнего однородного поля в объ- еме преобразователя перед началом
непрерывных измерении параметров магнитного поля при перемещении данного преобразователя по первому направлению. Зная составляющие остаточного внешнего однородного магнитного поля, можно скорректировать компенсацию однородного магнитного поля в объеме преобразователя и тем самым повысить точность последующих
измерений параметров магнитного поля, созданного диполем, а значит, и повысить точность определения координат и магнитного момента этого диполя.
Формула изобретения
1 . Способ определения магнитного момента дипольного источника поля и
координат этого источника, основанный на измерении трех компонент маг- ниточувствительным преобразователем в трех т.очках пространства составляющих векторов индукции магнитного поля, коллинеарных осям прямоугольной системы координат OXYZ, определении по местоположениям этих трех точек пространства магнитного момента дипольного источника поля и координат зтого источника, о т л и ч а - ю щ и й с я тем, что, с целью повышения точности, предварительно компенсируют магнитное поле диполя в объеме трехкомпонентного преобразователя в любой выбранной точке пространства, затем перемещают магнито- чувствительньй преобразователь по выбранному произвольно направлению и, непрерывно измеряя составляющие векторов индукции магнитного поля, выбирают три точки пространства с различными значениями по крайней мере трех коллинеарных составляющих векторов индукции магнитного поля, изменяют направление перемещения преобразователя на непараллельное предыдущему и в трех точках пространства с различными значениями по крайней мере трех коллинеарных составляюпщх векторов индукции магнитного поля находят разность составляющих векторов индукции магнитного поля между любой из выбранных трех точек пространства на одном из направлений перемещения преобразователя, и каждой из двзгх остальных точек пространства на этом же направлении, на котором упомянутые разности составляющих векторов образуют два независимых вектора индукции магнитного поля.
2. Способ ПОП.1, отличающийся тем, что дополнительно перемещают трехкомпонентный магнито- чувствитепьный преобразователь в направлении, непараллельном к плоскости, проходящей через точки пространства, выбранные на первом и втором направлениях перемещения преобразователя, выбирают на третьем направлении перемещения преобразователя
три точки пространства с различными значениями трех коллинеарных составляющих векторов индукции магнитного поля и вычисляют разности составляющих векторов индукции магнитного поля между любой из трех точек пространства, выбранных на одном из направлений перемещения преобразователя, и каждой из двух остальных точек пространства, выбранных на этом же
направлении перемещения преобразователя, на котором упомянутые разности составляющих векторов образуют два независимых вектора индукции магнитного поля.
I
W8.2
Изобретение относится к области измерительной техники и может быть использовано в геофизике для проведения магниторазведочных работ, в судостроительной промытпенности для обеспечения навигационного оборудования, в медицине для диагностики и лечения. Целью изобретения является повышение точности определения магт en с нитного момента дипольного источника поля и координат этого источника. Способ может быть реализован устройством, состоящим из трехкомпонентно- го магниточувствительного преобразователя 1, местоположение которого известно в прямоугольной системе координат ХУ, усилителя-преобразователя 2,генератора 3 переменной ЭДС,блока 4 коммутации, блок а 5 обратной связи по измеряемому магнитному полю, блока 6 выделения составляющих вектора индукции магнитного поля, регистратора 7, вычислительного блока 8 и подвижной стабилизированной платформы 9, на которой установлен преобразователь 1. Способ позволяет также определить составлякжцие остаточного внешнего однородного магнитного поля,что повышает точность определения координат и магнитного момента данного поля. 1 з.п. ф-лы, 2 ил. с (Л 00 ю to ю о оо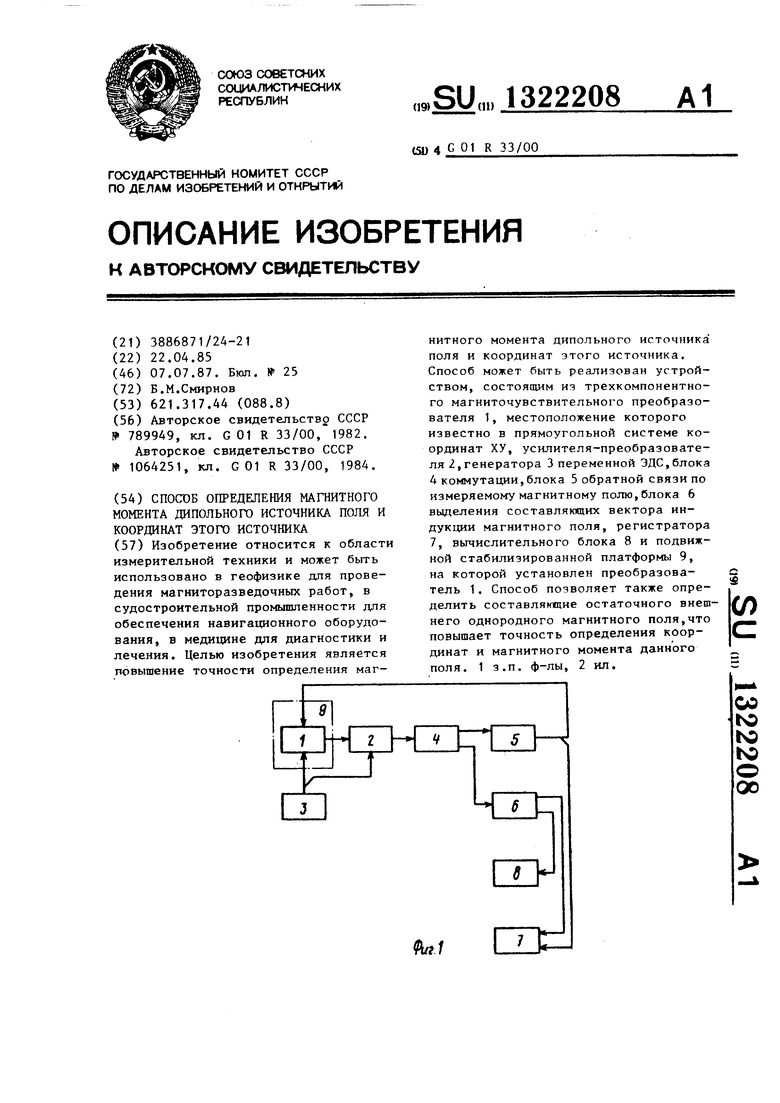
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ определения магнитного момента дипольного источника поля и координат точки приложения этого момента | 1982 |
|
SU1064251A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
