Изобретение относится к области измерительной техники и может быть использовано для создания средств измерения угловых величин в автоматических схемах управления, в геомагнитной навигации, в прецизионном машиностроении и приборостроении и т.д.
Известно магнитометрическое устройство для определения углового положения тела, реализующее способ определения магнитного момента дипольного источника поля по измеренным параметрам магнитного поля в каждой из трех выбранных точек пространства (АС N 1064251, БИ N 48, 1983). Известное устройство состоит из трех трехкомпонентных магниточувствительных преобразователей (датчиков), трех усилительно-преобразовательных блоков, первые входы которых подключены к выходам соответствующих датчиков, а первые выходы подключены к соответствующим первым входам этих датчиков, трех генераторов переменной ЭДС, первые выходы которых подключены к соответствующим вторым входам усилительно-преобразовательных блоков, вычислительного блока, вход которого подключен ко вторым выходам усилительно-преобразовательных блоков, а выход подключен к третьим входам датчиков, и дипольного источника поля в виде намагниченного тела. При этом каждый усилительно-преобразовательный блок, подключенный к соответствующему трехкомпонентному датчику, состоит из трех каналов, каждый из которых содержит избирательный усилитель и синхронный детектор. Электрически связанные между собой трехкомпонентный датчик, усилительно-преобразовательный блок и генератор переменной ЭДС образуют электронный блок, поэтому известное устройство содержит три электронных блока.
Известное устройство работает следующим образом. На вторые входы датчиков подаются с первых выходов соответствующих генераторов переменные ЭДС, возбуждающие эти датчики. В результате этого на выходе каждого из датчиков появляются три ЭДС второй гармоники, каждая из которых пропорциональна одной из трех компонент магнитного поля, созданного дипольным источником и внешним магнитным полем, в частности, геомагнитным полем и магнитным полем промышленных помех. Выходные сигналы с датчиков усиливаются и детектируются в соответствующих усилительно-преобразовательных блоках, поэтому выходные сигналы с каждого усилительно-преобразовательного блока пропорциональны трем компонентам вектора магнитной индукции. Для детектирования сигналов на вторые входы каждого усилительно-преобразовательного блока подается переменное напряжение со вторых выходов соответствующих генераторов переменной ЭДС. Выходные сигналы с первых выходов усилительно-преобразовательных блоков подаются на первые входы соответствующих трехкомпонентных датчиков, обеспечивая отрицательную обратную связь по измеряемым составляющим векторов магнитной индукции. Выходные сигналы с усилительно-преобразовательных блоков подаются на входы вычислительного блока. В вычислительном блоке осуществляется определение компонент однородного магнитного поля, координат и магнитного момента дипольного источника, а также определение направляющих косинусов вектора магнитного момента этого источника. Направление вектора магнитного момента дипольного источника поля жестко связано с намагниченностью тела этого источника. (Е. Т. Чернышев, Е.Н.Чечурина, Н.Г.Чернышева, Н.В.Студенцов. Магнитные измерения. М.: Изд-во Комитета стандартов и измерительных приборов. 1969. С. 41-42), поэтому направляющие косинусы вектора магнитного момента дипольного источника поля определяют и угловое положение этого источника. Сигналы, пропорциональные компонентам вектора однородного магнитного поля, поступают с выходов вычислительного блока на соответствующий датчик, осуществляя компенсацию однородного магнитного поля в объеме каждого датчика.
Известное устройство осуществляет измерение разностей проекций векторов магнитной индукции, созданной дипольным источником постоянного магнитного поля на фоне магнитного поля промышленных помех и геомагнитного поля. Магнитное поле промышленных помех и геомагнитное поле могут более чем на два порядка превышать магнитное поле дипольного источника в выбранных местах расположения датчиков. В данном устройстве отсутствует избирательность по полезному сигналу. Действительно, датчики для измерения разностей проекций векторов магнитной индукции дипольного источника воспринимают неоднородное внешнее магнитное поле, как полезный сигнал. Все это приводит к снижению точности измерения разностей проекций векторов магнитной индукции, а, следовательно, и к снижению точности определения углового положения тела, на котором расположен источник. Известное устройство отличается сложностью конструкции. Действительно, в его состав входят три активных трехкомпонентных датчика, три генератора переменной ЭДС и три усилительно-преобразовательных блока, каждый из которых состоит из трех каналов, при этом каждый канал содержит избирательный усилитель и синхронный детектор. Кроме того, известное устройство, содержащее три трехкомпонентных активных датчика и намагниченное тело, является источником неоднородного магнитного поля, которое может отрицательно действовать, например, на биологическое тело.
Известно также магнитометрическое устройство для определения углового положения тела (заявка N 94023395/28/022405, пoлoж. peш. oт 13.09.95), которое по совокупности существенных признаков наиболее близко предлагаемому и принято за прототип.
Известное устройство состоит из двух трехкомпонентных магниточувствительных датчиков, каждый из которых имеет три выхода по составляющим вектора магнитной индукции, шести усилительно-преобразовательных блоков, из которых первые входы первых трех усилительно-преобразовательных блоков подключены к трем выходам первого трехкомпонентного датчика, а первые входы четвертого, пятого и шестого усилительно-преобразовательных блоков подключены к трем выходам второго трехкомпонентного датчика, генератора переменной ЭДС, подключенного к упомянутым датчикам и блокам, шести фильтров нижних частот, из которых входы первых трех фильтров подключены к соответствующим выходам первых трех усилительно-преобразовательных блоков, а первые входы четвертого, пятого и шестого фильтров подключены к соответствующим выходам четвертого, пятого и шестого усилительно-преобразовательных блоков, двух катушек индуктивности, расположенных на теле, оси которых взаимно ортогональны, двух генераторов нижних частот, первый и второй выходы одного из которых подключены к выводам первой катушки индуктивности, а первый и второй выходы второго генератора нижних частот подключены к выводам второй катушки индуктивности, шести блоков синхронного детектирования, из которых первые входы первого и второго, третьего и четвертого, пятого и шестого блоков синхронного детектирования подключены к третьему выходу первого генератора нижних частот, а вторые входы этих блоков подключены к третьему выходу второго генератора нижних частот, третьи входы первого, второго и третьего блоков синхронного детектирования подключены к соответствующим выходам первого, второго и третьего усилительно-преобразовательного блоков, а третьи входы четвертого, пятого и шестого блоков синхронного детектирования подключены к соответствующим выходам четвертого, пятого и шестого усилительно-преобразовательных блоков. При этом выходы всех блоков синхронного детектирования являются выходами устройства, выходы первого, второго и третьего фильтров нижних частот подключены ко входам первого трехкомпонентного датчика, а выходы четвертого, пятого и шестого фильтров нижних частот подключены ко входам второго трехкомпонентного датчика.
Известное устройство работает следующим образом. На вторые входы трехкомпонентных датчиков, например феррозондовых, подается с генератора переменной ЭДС напряжение, возбуждающее эти датчики. В результате этого на трех выходах каждого трехкомпонентного датчика появляются три ЭДС второй гармоники, каждая из которых пропорциональна составляющей вектора магнитной индукции. На трехкомпонентные датчики действует геомагнитное поле, магнитное поле промышленных помех и переменные магнитные поля, воспроизводимые катушками индуктивности. Для этого выводы первой и второй катушек индуктивности подключены к соответствующим выходам первого и второго генераторов нижних частот. Выходные сигналы с трехкомпонентных датчиков усиливаются и детектируются в соответствующих усилительно-преобразовательных блоках. Для этого на вторые входы усилительно-преобразовательных блоков подается переменное напряжение с генератора переменной ЭДС. Выходные сигналы с усилительно-преобразовательных блоков подаются на фильтры нижних частот, входы которых подключены к соответствующим двум трехкомпонентным датчикам. Фильтры нижних частот настроены на частоты генераторов нижних частот, поэтому они не пропускают сигналы этих частот на входы трехкомпонентных датчиков. Следовательно, каждое из двух магнитометрических устройств, состоящее из электрически связанных между собой трехкомпонентного датчика, трех усилительно-преобразовательных блоков и трех фильтров нижних частот, охвачены глубокой отрицательной обратной связью по магнитному полю, действующему на соответствующий датчик, за исключением магнитных полей, отличающихся по частоте и воспроизводимых катушками индуктивности. Усиленные усилительно-преобразовательными блоками сигналы, пропорциональные магнитным полям, созданным катушками индуктивности, поступают на первые входы соответствующих блоков синхронного детектирования. С первого и второго генераторов нижних частот подаются опорные напряжения на соответствующие блоки синхронного детектирования. В результате этого на выходах соответствующих трех блоков синхронного детектирования будут сигналы, пропорциональные магнитной индукции, воспроизводимой первой катушкой индуктивности в местах расположения трехкомпонентных датчиков, а на выходах остальных трех блоков синхронного детектирования будут сигналы, пропорциональные магнитной индукции, воспроизводимой второй катушкой индуктивности в местах расположения этих датчиков. По выходным сигналам с блоков синхронного детектирования и известным местоположениям двух трехкомпонентных датчиков определяют координаты, дипольные магнитные моменты и угловые положения осей обеих катушек индуктивности, а следовательно, и угловое положение тела, жестко связанного с катушками индуктивности.
Каждый блок синхронного детектирования состоит из двух синхронных детекторов. На один из входов первого синхронного детектора подается переменное напряжение с третьего выхода первого генератора нижних частот, а на другой вход второго синхронного детектора подается переменное напряжение с третьего выхода второго генератора нижних частот. На параллельно включенные входы каждой пары синхронных детекторов, образующей блок синхронного детектирования, подается напряжение соответствующего усилительно-преобразовательного блока.
Известное устройство отличается сложностью конструкции и влиянием на тело переменного магнитного поля, воспроизводимого катушками индуктивности, которые могут быть расположены непосредственно на исследуемом теле. Эти переменные магнитные поля могут существенно превышать предельно-допустимые уровни воздействия на тело, в частности, на биологические объекты. Так, например, магнитное поле на расстоянии 5 см от дипольного источника с магнитным моментом 0.01 Ам2 примерно в три раза превышает геомагнитное поле, что уже превышает предельно-допустимые уровни воздействия переменного магнитного поля, например, на человека. Иногда конструктивные особенности тела, его габариты не позволяют установить на теле два источника магнитного поля или два трехкомпонентных датчика.
Задачей предлагаемого изобретения является создание магнитометрического устройства для определения углового положения тела, отличающегося от прототипа более простой конструкцией, меньшими габаритами, а также существенно ослабляющим воздействием переменного магнитного поля на тело, но обеспечивающего, как и прототип, определение углового положения тела с высокой точностью.
Поставленная задача решается за счет определения углового положения тела по измеренным одним пассивным трехкомпонентным датчиком, расположенным на теле, составляющих векторов магнитной индукции, воспроизводимой четырьмя или шестью источниками переменного магнитного поля.
Предлагаемое техническое решение представляет собой два магнитометрических устройства для определения углового положения тела, связанных между собой настолько, что они образуют единый общий изобретательский замысел.
Предлагаемое магнитометрическое устройство для определения углового положения тела (по первому варианту), содержащее трехкомпонентный магниточувствительный датчик с тремя выходами по каждой составляющей вектора магнитной индукции, трех блоков синхронного детектирования, выходы которых являются выходами устройства, генератор переменных напряжений, первый выход которого подключен к первым входам первого, второго и третьего блоков синхронного детектирования, а второй выход - к вторым входам этих блоков, и две катушки индуктивности, выводы одной из которых подключены к третьему и четвертому выходам генератора переменных напряжений, а выводы второй катушки индуктивности подключены к пятому и шестому выходам генератора переменных напряжений, снабжено двумя дополнительными катушками индуктивности, выводы одной из которых подключены к седьмому и восьмому выходам генератора переменных напряжений, а выводы второй - к девятому и десятому выходам генератора переменных напряжений, одиннадцатый выход которого подключен к третьим, а двенадцатый выход - к четвертым входам первого, второго и третьего блоков синхронного детектирования, при этом центр симметрии одной из основных катушек размещен на оси второй катушки, а угол между осями основных катушек и угол между осями дополнительных катушек взяты в пределах (0o; ± 180o), причем магниточувствительный датчик выполнен пассивным и установлен на исследуемом теле, первый выход датчика подключен к пятому входу первого блока синхронного детектирования, второй выход датчика подключен к пятому входу второго блока синхронного детектирования и третий выход датчика подключен к пятому входу третьего блока синхронного детектирования.
Предлагаемое магнитометрическое устройство (по второму варианту), содержащее трехкомпонентный магниточувствительный датчик с тремя выходами по каждой составляющей вектора магнитной индукции, трех блоков синхронного детектирования, выходы которых являются выходами устройства, генератор переменных напряжений, первый выход которого подключен к первым входам первого, второго и третьего блоков синхронного детектирования, а второй выход - ко вторым входам этих блоков, и две катушки индуктивности с взаимно ортогональными осями, выводы одной из которых подключены к третьему и четвертому выходам генераторов переменных напряжений, а выводы второй катушки индуктивности подключены к пятому и шестому выходам генератора переменных напряжений, снабжено двумя дополнительными катушками индуктивности с взаимно ортогональными осями и двумя вспомогательными катушками индуктивности с параллельными осями, выводы одной из дополнительных катушек подключены к седьмому и восьмому выходам генератора переменных напряжений, а выводы второй дополнительной катушки - к девятому и десятому выходам генератора переменных напряжений, одиннадцатый выход которого подключен к третьим, двенадцатый выход подключен к четвертым, тринадцатый выход подключен к пятым, четырнадцатый выход подключен к шестым входам первого, второго и третьего блоков синхронного детектирования, выводы одной из вспомогательных катушек подключены к пятнадцатому и шестнадцатому выходам генератора переменных напряжений, а выводы второй вспомогательной катушки подключены к семнадцатому и восемнадцатому выходам генератора переменных напряжений, при этом, по крайней мере, центры симметрии одной из вспомогательных и одной из основных катушек индуктивности размещены на оси второй основной катушки индуктивности, причем магниточувствительный датчик выполнен пассивным и установлен на исследуемом теле, первый выход датчика подключен к седьмому входу первого блока синхронного детектирования, второй выход датчика подключен к седьмому входу второго блока синхронного детектирования и третий выход датчика подключен к седьмому входу третьего блока синхронного детектирования.
Измерение углового положения тела в предлагаемом техническом решении по первому и второму вариантам осуществляется по направляющим косинусам вектора дипольного магнитного момента одной из катушек индуктивности в системе координат, оси которой совпадают с осями датчика, жестко связанного с телом. Направление вектора магнитного момента дипольного источника поля, в частности, катушки индуктивности, жестко связанного с осью катушки (Е.Т.Чернышев, Е.Н. Чечурина, Н. Г. Чернышева, Н. В.Студенцов. Магнитные измерения. М.: Изд-во Комитета стандартов и измерительных приборов. 1969. с. 41-42), поэтому направляющие косинусы вектора дипольного магнитного момента определяют угловое положение упомянутого источника в системе координат датчика или угловое положение датчика, а, следовательно, и тела относительно этого источника.
Применение в предлагаемом техническом решении по первому варианту одного трехкомпонентного датчика, расположенного на теле, генератора переменных напряжений, трех блоков синхронного детектирования, подключенных соответствующим образом к трем выходам датчика и четырем выходам генератора переменных напряжений, и четырех катушек индуктивности, подключенных к генератору переменных напряжений, воспроизводящих переменные магнитные поля, синхронизированные с напряжениями, поступающими на первые, вторые, третьи и четвертые входы трех блоков синхронного детектирования, - все это упрощает конструкцию предлагаемого устройства по сравнению с известным, которое принято за прототип. Применение в предлагаемом техническом решении катушек индуктивности, у которых центр симметрии одной из основных катушек размещен на оси второй катушки, а угол между осями основных катушек и угол между осями дополнительных катушек взяты в пределах (0o; ± 180o), и измерение составляющих векторов магнитной индукции, созданных всеми катушками индуктивности, обеспечивают определение углового положения осей катушек индуктивности в системе координат датчика, а, значит, и определение углового положения тела. Кроме того, в предлагаемом устройстве размещение на теле только одного пассивного трехкомпонентного датчика существенно ослабляет воздействие на тело переменных магнитных полей, воспроизводимых катушками индуктивности по сравнению с прототипом, в котором катушки индуктивности расположены на теле.
Применение в предлагаемом техническом решении по второму варианту одного трехкомпонентного датчика, расположенного на теле, генератора переменных напряжений, трех блоков синхронного детектирования, подключенных соответствующим образом к трем выходам датчика и шести выходам генератора переменных напряжений, шести катушек индуктивности, подключенных к генератору переменных напряжений, воспроизводящих переменные магнитные поля, синхронизированные с напряжениями, поступающими на первые, вторые, третьи, четвертые, пятые и шестые входы трех блоков синхронного детектирования, а также размещение в предлагаемом техническом решении осей двух основных катушек индуктивности с взаимно ортогональными осями, осей двух дополнительных катушек индуктивности с взаимно ортогональными осями, двух вспомогательных катушек индуктивности с параллельными осями с центрами симметрии одной из вспомогательных и одной из основных катушек индуктивности, размещенных на оси второй основной катушки индуктивности, и измерение составляющих векторов магнитной индукции, созданных всеми катушками индуктивности, обеспечивает определение углового положения осей катушек индуктивности в системе координат датчика, а, значит, и определение углового положения тела в пределах от 0 до 360o при вращении тела вокруг произвольно выбранной оси. Кроме того, в предлагаемом устройстве размещение на теле только одного пассивного трехкомпонентного датчика существенно ослабляет воздействие на тело переменных магнитных полей, воспроизводимых катушками индуктивности по сравнению с прототипом, в котором катушки индуктивности размещены на теле.
Таким образом, технический результат предлагаемого устройства для определения углового положения тела выражается в существенном ослаблении влияния на тело переменных магнитных полей, воспроизводимых катушками индуктивности.
Сущность предлагаемого изобретения поясняется следующими графическими материалами.
На фиг. 1 изображена структурная схема магнитометрического устройства для определения углового положения тела.
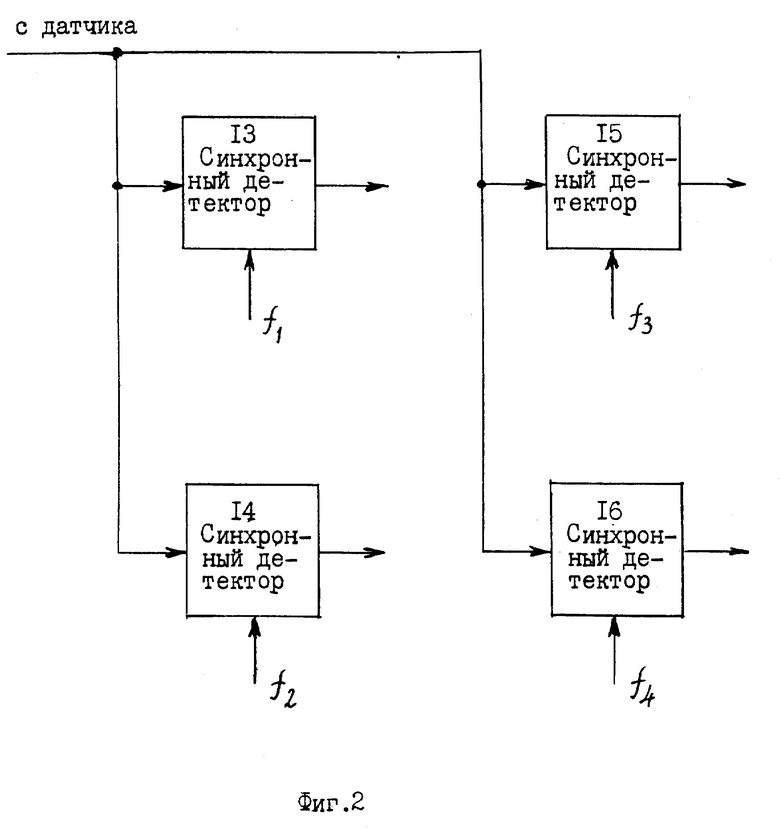
На фиг. 2 изображена структурная схема блока синхронного детектирования магнитометрического устройства для определения углового положения тела по первому варианту.
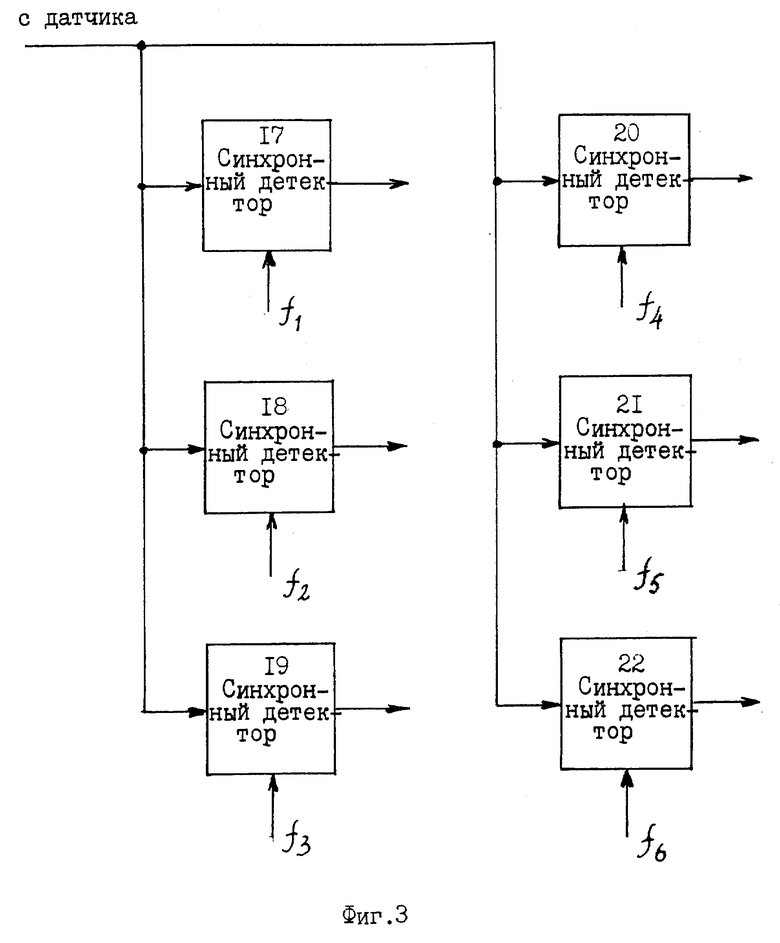
На фиг. 3 изображена структурная схема блока синхронного детектирования магнитометрического устройства для определения углового положения тела по второму варианту.
Предлагаемое магнитометрическое устройство для определения углового положения тела по первому варианту (см. фиг. 1) состоит из пассивного трехкомпонентного магниточувствительного датчика 1 с тремя выходами по каждой составляющей вектора магнитной индукции, трех блоков синхронного детектирования 2 - 4, выходы которых являются выходами устройства, генератора переменных напряжений 5, первый выход которого подключен к первым входам блоков 2 - 4, второй выход этого генератора 5 подключен ко вторым входам этих блоков 2 - 4, одиннадцатый выход подключен к третьим, а двенадцатый - к четвертым входам блоков 2 - 4, двух основных катушек индуктивности 6 и 7, двух дополнительных катушек индуктивности 8 и 9 и исследуемого тела 10, на котором установлен датчик 1. Выводы катушки 6 подключены к третьему и четвертому выходам генератора 5, выводы катушки 7 подключены к пятому и шестому выходам генератора 5, выводы катушки 8 подключены к седьмому и восьмому выходам генератора 5, а выводы катушки 9 подключены к девятому и десятому выходам генератора 5. Оси всех катушек 6 - 9 размещены, например, в одной плоскости OYZ декартовой системы координат OXYZ, а центры симметрии этих катушек - на одной оси, в частности, на оси OZ, с которой установлена соосно, например, ось катушки 7, а угол между осями этих катушек равен 90o. Угол между осью катушки 8 и осью OZ равен α, угол между осью катушки 9 и осью OY равен, например, α и принадлежит интервалам (0o; ± 180o).
Датчик 1 выполнен пассивным. Первый выход датчика 1 подключен к пятому входу блока 2, второй выход датчика 1 подключен к пятому входу блока 3 и третий выход датчика 1 подключен к 5 входу блока 4.
Предлагаемое магнитометрическое устройство для определения углового положения тела по второму варианту (см. фиг. 1) состоит из пассивного трехкомпонентного магниточувствительного датчика 1 с тремя выходами по каждой составляющей вектора магнитной индукции, трех блоков синхронного детектирования 2 - 4, выходы которых являются выходами устройства, генератора переменных напряжений 5, первый выход которого подключен к первым входам блоков 2 - 4, второй выход этого генератора 5 подключен ко вторым входам блоков 2 - 4, одиннадцатый выход подключен к третьим, двенадцатый выход подключен к четвертым, тринадцатый выход подключен к пятым, четырнадцатый выход подключен к шестым входам блоков 2 - 4, двух основных катушек индуктивности 6 и 7 с взаимно ортогональными осями, двух дополнительных катушек индуктивности 8 и 9 с взаимно ортогональными осями, двух вспомогательных катушек индуктивности 11 и 12 с параллельными осями и исследуемого тела 10, на котором установлен датчик 1. Выводы катушки 6 подключены к третьему и четвертому выходам генератора 5, выводы катушки 7 подключены к пятому и шестому выходам генератора 5, выводы катушки 8 подключены к седьмому и восьмому выходам генератора 5, выводы катушки 9 подключены к девятому и десятому выходам генератора 5, выводы катушки 11 подключены к пятнадцатому и шестнадцатому выходам генератора 5, а выводы катушки 12 подключены к семнадцатому и восемнадцатому выходам генератора 5. Оси катушек 6 - 9 размещены, например, в одной плоскости, в частности, в плоскости OYZ декартовой системы координат OXYZ, а оси катушек 11 и 12 - перпендикулярно этой плоскости OYZ. Центры симметрии всех катушек 6-9, 11 и 12 размещены, например, на одной оси, в частности, на оси OZ, с которой установлена соосно, например, ось катушки 7. Угол между осью катушки 8 и осью OZ равен α, где 0o < α < 360o. Датчик 1 выполнен пассивным. Первый выход датчика 1 подключен к седьмому входу блока 2, второй выход датчика 1 подключен к седьмому входу блока 3 и третий выход датчика 1 подключен к седьмому входу блока 4.
В предлагаемом магнитометрическом устройстве для определения углового положения тела по первому варианту каждый из блоков 2-4 (см. фиг. 1) состоит (см. фиг. 2) из четырех синхронных детекторов 13-16. Первые входы детекторов 13-16, названные на фиг. 1 первым, вторым, третьим и четвертым входами, подключены соответственно к первому, второму, одиннадцатому и двенадцатому выходам генератора 5. Вторые входы детекторов 13-16 (см. фиг. 2) соединены параллельно и подключены к одному из выходов датчика 1 (см. фиг. 1). В параллельно соединенные входы (см. фиг. 2) детекторов 13-16 названы на фиг.1 пятыми для устройства по первому варианту.
В предлагаемом магнитометрическом устройстве для определения углового положения тела по второму варианту каждый из блоков 2 - 4 (см. фиг. 1) состоит (см. фиг. 3) из шести синхронных детекторов 17-22. Первые выходы детекторов 17-22, названные на фиг.1 для устройства по второму варианту первым, вторым, третьим, четвертым, пятым и шестым входами, подключены соответственно к первому, второму, одиннадцатому, двенадцатому, тринадцатому и четырнадцатому выходам генератора 5. Вторые входы детекторов 17 - 22 (см. фиг. 3) соединены параллельно и подключены к одному из выходов датчика 1 (см. фиг. 1). Параллельно соединенные входы (см. фиг. 3) детекторов 17 - 22 названы на фиг.1 седьмыми для устройства по второму варианту.
Предлагаемое магнитометрическое устройство для определения углового положения тела по первому варианту работает следующим образом.
В катушках 6 - 9 (см. фиг. 1), подключенных к генератору 5, протекают переменные токи разных частот. В результате этого катушки 6 - 9 воспроизводят переменные магнитные поля с частотами f1, f2, f3, f4. В пассивном, например, индукционном трехкомпонентном датчике 1 по каждой компоненте индуктируются три переменные ЭДС, каждая из которых пропорциональна составляющей вектора магнитной индукции, созданной катушками 6 - 9 с соответствующими частотами f1, f2, f3, f4. Эти ЭДС усиливаются и детектируются блоками 2 - 4 (см. фиг. 1). Для этого на первый, второй, третий и четвертый входы каждого из блоков 2 - 4 подаются опорные напряжения с соответствующими частотами f1, f2, f3, f4 с генератора 5, а на пятые входы этих блоков 2 - 4 подаются с соответствующих выходов датчика 1 переменные ЭДС. В результате этого на выходе каждого из блоков 2 - 4 будут сигналы соответствующих полярностей, пропорциональные амплитудам составляющих векторов магнитной индукции, созданных катушками 6 - 9. Действительно, каждый из блоков 2 - 4 (см. фиг. 1) состоит из четырех синхронных детекторов 13 - 16 (см. фиг. 2), на одни входы которых подаются опорные напряжения с частотами f1-f4 с генератора 5, а на вторые параллельно-соединенные входы подается напряжение с соответствующего выхода датчика. Поэтому выходные сигналы с детекторов 13 - 16 будут пропорциональны следующим значениям проекций векторов магнитной индукции, созданных катушками 6 - 9: проекциям векторов магнитной индукции  на ось O'X' (см. фиг.1) для детекторов 13 - 16 (см. фиг. 2), подключенных к первому выходу датчика 1 и принадлежащих блоку 2 (см. фиг. 2); проекциям векторов магнитной индукции
на ось O'X' (см. фиг.1) для детекторов 13 - 16 (см. фиг. 2), подключенных к первому выходу датчика 1 и принадлежащих блоку 2 (см. фиг. 2); проекциям векторов магнитной индукции  на ось O'Y'для детекторов 13 - 16 (см. фиг. 2), подключенных к второму выходу датчика 1 и принадлежащих блоку 3 (см. фиг. 1); проекциям векторов магнитной индукции
на ось O'Y'для детекторов 13 - 16 (см. фиг. 2), подключенных к второму выходу датчика 1 и принадлежащих блоку 3 (см. фиг. 1); проекциям векторов магнитной индукции  на ось O'Z'для детекторов 13-16 (см. фиг. 2), подключенных к третьему выходу датчика 1 и принадлежащих блоку 4 (см. фиг. 1), где O'X', О'Y' O'Z' - оси системы координат О'X'Y'Z' (см. фиг. 1), жестко связанные с датчиком 1. Датчик 1 жестко связан с телом 10, поэтому для изменения углового положения осей трехкомпонентного датчика 1 относительно осей катушек 6 - 9 следует изменить и угловое положение тела 10. По выходным сигналам с блоков детекторов 2 - 4 и известным пространственным местоположениям относительно друг друга катушек 6 - 9 определяют координаты этих катушек в системе координат датчика 1 и составляющие векторов дипольных магнитных моментов катушек 6 - 9. Значения сигналов с блока 2 будут пропорциональны проекциям векторов магнитной индукции
на ось O'Z'для детекторов 13-16 (см. фиг. 2), подключенных к третьему выходу датчика 1 и принадлежащих блоку 4 (см. фиг. 1), где O'X', О'Y' O'Z' - оси системы координат О'X'Y'Z' (см. фиг. 1), жестко связанные с датчиком 1. Датчик 1 жестко связан с телом 10, поэтому для изменения углового положения осей трехкомпонентного датчика 1 относительно осей катушек 6 - 9 следует изменить и угловое положение тела 10. По выходным сигналам с блоков детекторов 2 - 4 и известным пространственным местоположениям относительно друг друга катушек 6 - 9 определяют координаты этих катушек в системе координат датчика 1 и составляющие векторов дипольных магнитных моментов катушек 6 - 9. Значения сигналов с блока 2 будут пропорциональны проекциям векторов магнитной индукции  на ось О'X'датчика 1, значения сигналов с блока 3 пропорциональны проекциям векторов магнитной индукции
на ось О'X'датчика 1, значения сигналов с блока 3 пропорциональны проекциям векторов магнитной индукции  на ось О'Y' датчика 1 и значения сигналов с блока 4 пропорциональны проекциям векторов магнитной индукции
на ось О'Y' датчика 1 и значения сигналов с блока 4 пропорциональны проекциям векторов магнитной индукции  на ось O'Z' датчика 1. Таким образом, с блоков 2 - 4 выдается информация о четырех векторах магнитной индукции
на ось O'Z' датчика 1. Таким образом, с блоков 2 - 4 выдается информация о четырех векторах магнитной индукции  созданной соответствующими катушками 7, 6, 8, 9. Обозначим координаты центров симметрии катушек 6, 8, 9 относительно центра симметрии катушки 7, который совпадает с началом опорной (неподвижной) системы координат OXYZ, соответственно 6(O, O, C1), 8(O, O, C2), 9(O, O, C3). Ось катушки 7 соосна с осью OZ (см. фиг.1), а центры симметрии катушек 6, 8, 9 размещены например, на оси OZ, поэтому систему четырех уравнений для
созданной соответствующими катушками 7, 6, 8, 9. Обозначим координаты центров симметрии катушек 6, 8, 9 относительно центра симметрии катушки 7, который совпадает с началом опорной (неподвижной) системы координат OXYZ, соответственно 6(O, O, C1), 8(O, O, C2), 9(O, O, C3). Ось катушки 7 соосна с осью OZ (см. фиг.1), а центры симметрии катушек 6, 8, 9 размещены например, на оси OZ, поэтому систему четырех уравнений для  в соответствии с выбранным размещением осей катушек 6 - 9 можно представить в следующем виде:
в соответствии с выбранным размещением осей катушек 6 - 9 можно представить в следующем виде:
где 
n1, n2, n3 - направляющие косинусы оси OZ в системе координат O'X'Y'Z' (Н.В.Ефимов. Квадратичные формы и матрицы. М.: "Наука" 1975);
m1, m2, m3 - направляющие косинусы оси OY в системе координат O'X'Y'Z'; {x', y', z'} - радиус-вектор датчика 1 относительно полюса O системы координат OXYZ;
{x', y', z'} - радиус-вектор датчика 1 относительно полюса O системы координат OXYZ;
x', y', z'- проекции радиус-вектора  в системе координат O'X'Y'Z';
в системе координат O'X'Y'Z';




M1, M2, M3, M4 - амплитуды векторов дипольных магнитных моментов катушек 6 - 9 соответственно.
В приведенных уравнениях неизвестными являются  По измеренным
По измеренным  и известным
и известным  определяют координаты датчика 1 в системе координат
определяют координаты датчика 1 в системе координат  и составляющие векторов дипольных магнитных моментов
и составляющие векторов дипольных магнитных моментов  соответствующих катушек 7, 6, 8, 9 по аналогичному алгоритму, приведенному в работе (Б.Н. Смирнов. Методы определения координат и магнитного момента дипольного источника поля /М.: Измерительная техника. 1988. Вып. 9 с.40-42). По полученным n и m определяют
соответствующих катушек 7, 6, 8, 9 по аналогичному алгоритму, приведенному в работе (Б.Н. Смирнов. Методы определения координат и магнитного момента дипольного источника поля /М.: Измерительная техника. 1988. Вып. 9 с.40-42). По полученным n и m определяют  { l1, l2, l3} , где l1, l2, l3 - направляющие косинусы оси OX в системе координат O'X'Y'Z'. Девять направляющих косинусов l1, m1, n1, l2, m2, n2, l3, m3, n3 определяют угловое положение системы координат O'X'Y'Z', жестко связанной с телом 10 (см. фиг.1), в опорной системе координат OXYZ (Н.В. Ефимов. Квадратичные формы и матрицы. М.: "Наука". 1975), а, следовательно, эти направляющие косинусы определяют и угловое положение тела 10 в системе координат OXYZ.
{ l1, l2, l3} , где l1, l2, l3 - направляющие косинусы оси OX в системе координат O'X'Y'Z'. Девять направляющих косинусов l1, m1, n1, l2, m2, n2, l3, m3, n3 определяют угловое положение системы координат O'X'Y'Z', жестко связанной с телом 10 (см. фиг.1), в опорной системе координат OXYZ (Н.В. Ефимов. Квадратичные формы и матрицы. М.: "Наука". 1975), а, следовательно, эти направляющие косинусы определяют и угловое положение тела 10 в системе координат OXYZ.
Принятая ориентация осей катушек 6 - 9 (см. фиг. 1) и их пространственное расположение относительно друг друга позволяет определить направляющие косинусы осей датчика 1 в опорной системе координат OXYZ, а значит, и тело 10 при вращении его вокруг любой оси, при этом определение углового положения тела 10 осуществляется не только при его вращении, но и при одновременном поступательном движении.
Предлагаемое магнитометрическое устройство для определения углового положения тела по второму варианту работает следующим образом.
В катушках 6 - 12 (см. фиг. 1), подключенных к генератору 5, протекают переменные токи разных частот. В результате этого катушки 6 - 12 воспроизводят переменные магнитные поля с частотами f1, f2, f3, f4, f5, f6. В пассивном, например, индукционном датчике 1 по каждой компоненте индуктируются три переменные ЭДС, каждая из которых пропорциональна составляющим вектора магнитной индукции, созданной катушками 6 - 12 с соответствующими частотами f1, ... f6. Эти ЭДС усиливаются и детектируются блоками 2 - 4. Для этого на первый, второй, третий, четвертый, пятый и шестой входы каждого из блоков 2 - 4 подаются опорные напряжения с соответствующими частотами f1...f6 с генератора 5, а на седьмые входы этих блоков 2 - 4 подаются с соответствующих выходов датчика 1 переменные ЭДС. В результате этого на выходах каждого из блоков 2 - 4 будут сигналы соответствующих полярностей, пропорциональные амплитудам составляющих векторов магнитной индукции, созданных катушками 6-12. Действительно, каждый из блоков 2 - 4 (см. фиг. 1) состоит из шести синхронных детекторов 17 - 22 (см. фиг. 3), на одни входы которых подаются опорные напряжения с частотами f1...f6 с генератора 5, а на вторые параллельно соединенные входы подается напряжение с соответствующего выхода датчика. Поэтому выходные сигналы с детекторов 17 - 22 будут пропорциональны следующим значениям проекций векторов магнитной индукции, созданных катушками 6 - 12: проекциям векторов магнитной индукции  на ось O'X'(см. фиг. 1) для детекторов 17 - 22 (см. фиг. 3), подключенных к первому выходу датчика и принадлежащих блоку 2 (см. фиг. 1); проекциям векторов магнитной индукции
на ось O'X'(см. фиг. 1) для детекторов 17 - 22 (см. фиг. 3), подключенных к первому выходу датчика и принадлежащих блоку 2 (см. фиг. 1); проекциям векторов магнитной индукции  на ось O'Y' (см. фиг. 1) для детекторов 17-22 (см. фиг. 3), подключенных к второму выходу датчика и принадлежащих блоку 3 (см. фиг.1); проекциям векторов магнитной индукции
на ось O'Y' (см. фиг. 1) для детекторов 17-22 (см. фиг. 3), подключенных к второму выходу датчика и принадлежащих блоку 3 (см. фиг.1); проекциям векторов магнитной индукции  на ось O'Z'(см. фиг. 1) для детекторов 17 - 22 (см. фиг. 3), подключенных к третьему выходу датчика и принадлежащих блоку 4 (см. фиг. 1), где O'X', O'Y', O'Z' - оси системы координат O'X'Y'Z' (см. фиг. 1), жестко связанные с датчиком 1. Так как датчик 1 жестко связан с телом 10, то для изменения углового положения осей датчика 1 относительно осей катушек 6 - 12 следует изменить и угловое положение тела 10. По выходным сигналам с детекторов 17 - 22 и известным пространственным местоположениям катушек 6 - 12 определяют координаты этих катушек в системе координат датчика 1 и составляющие векторов дипольных магнитных моментов катушек 6-12.
на ось O'Z'(см. фиг. 1) для детекторов 17 - 22 (см. фиг. 3), подключенных к третьему выходу датчика и принадлежащих блоку 4 (см. фиг. 1), где O'X', O'Y', O'Z' - оси системы координат O'X'Y'Z' (см. фиг. 1), жестко связанные с датчиком 1. Так как датчик 1 жестко связан с телом 10, то для изменения углового положения осей датчика 1 относительно осей катушек 6 - 12 следует изменить и угловое положение тела 10. По выходным сигналам с детекторов 17 - 22 и известным пространственным местоположениям катушек 6 - 12 определяют координаты этих катушек в системе координат датчика 1 и составляющие векторов дипольных магнитных моментов катушек 6-12.
Значения сигналов с блока 2 (см. фиг.1) пропорциональны проекции векторов магнитной индукции  на ось О'X' датчика 1, значения сигналов с блока 3 пропорциональны проекциям векторов магнитной индукции
на ось О'X' датчика 1, значения сигналов с блока 3 пропорциональны проекциям векторов магнитной индукции  на ось О'Y' датчика 1 и значений сигналов с блока 4 пропорциональны проекциям векторов магнитной индукции
на ось О'Y' датчика 1 и значений сигналов с блока 4 пропорциональны проекциям векторов магнитной индукции  на ось O'Z'датчика 1. Таким образом, с блоков 2 - 4 выдается информация о шести векторах магнитной индукции
на ось O'Z'датчика 1. Таким образом, с блоков 2 - 4 выдается информация о шести векторах магнитной индукции  созданных соответствующими катушками 6 - 12.
созданных соответствующими катушками 6 - 12.
Обозначим координаты центров симметрии катушек 6, 8, 9, 11, 12 относительно центра симметрии катушки 7 (см. фиг. 1), который совпадает с началом опорной (неподвижной) системы координат OXYZ, соответственно 6(O, O, C1), 8(O, O, C2), 9(O, O, C3), 11(O, O, C4), 12(O, O, C5). Ось катушки 7 соосна с осью OZ, а центры симметрии катушек 6, 8, 9, 11, 12 размещены на одной оси OZ. Тогда система шести уравнений для  можно представить в следующем виде:
можно представить в следующем виде:
где 
n1, n2, n3 - направляющие косинусы оси OZ в системе координат О'X'Y'Z';
m1, m2, m3 - направляющие косинусы оси OY в системе координат О'X'Y'Z';
l1, l2, l3 - направляющие косинусы оси OX в системе координат O'X'Y'Z' (Н.В.Ефимов. Квадратичные формы и матрицы. М.: "Наука". 1975); { x', y', z'} - радиус-вектор датчика 1 (см. фиг.1) относительно полюса O системы координат OXYZ;
{ x', y', z'} - радиус-вектор датчика 1 (см. фиг.1) относительно полюса O системы координат OXYZ;
x', y', z'- проекции радиус-вектора  в системе координат O'X'Y'Z';
в системе координат O'X'Y'Z';









M1, M2, M3, M4, M5 M6 - амплитуды векторов дипольных магнитных моментов катушек 6 - 9, 11, 12 соответственно.
В приведенных уравнениях неизвестными являются  По измеренным
По измеренным  и известным
и известным  определяют координаты датчика 1 в системе координат O'X'Y'Z' и
определяют координаты датчика 1 в системе координат O'X'Y'Z' и  по аналогичному алгоритму, приведенному в работе (Б.М.Смирнов. Методы определения координат и магнитного момента дипольного источника поля. М.: Измерительная техника, 1988. Вып. 9, с. 40-42) девять направляющих косинусов l1, m1, n1, l2, m2, n2, l3, m3, n3 определяют угловое положение системы координат O'X'Y'Z', жестко связанной с телом 10 (см. фиг. 1), в опорной системе координат OXVZ (Н. В. Ефимов. Квадратичные формы и матрицы. М.: "Наука". 1975), а, следовательно, эти направляющие косинусы определяют и угловое положение тела 10 в системе координат OXVZ.
по аналогичному алгоритму, приведенному в работе (Б.М.Смирнов. Методы определения координат и магнитного момента дипольного источника поля. М.: Измерительная техника, 1988. Вып. 9, с. 40-42) девять направляющих косинусов l1, m1, n1, l2, m2, n2, l3, m3, n3 определяют угловое положение системы координат O'X'Y'Z', жестко связанной с телом 10 (см. фиг. 1), в опорной системе координат OXVZ (Н. В. Ефимов. Квадратичные формы и матрицы. М.: "Наука". 1975), а, следовательно, эти направляющие косинусы определяют и угловое положение тела 10 в системе координат OXVZ.
Выбранная ориентация осей катушек 6, 7, 8, 9, 11, 12 (см. фиг. 1) и их пространственное расположение относительно друг друга позволяет определить направляющие косинусы осей датчика 1 в опорной системе координат OXVZ, а значит, и тела 10 при вращении его вокруг любой оси в пределах от 0 до 360o. Кроме того, результаты математического моделирования на ЭВМ показали, что точность определения углового положения тела по второму варианту примерно в 4 раза выше по сравнению с устройством по первому варианту. При этом определение углового положения тела устройством по второму варианту осуществляется, как и устройством по первому варианту, не только при вращении тела, но и при одновременном его поступательном движении.
Таким образом, в предлагаемом техническом решении по измеренным составляющим векторов магнитной индукции, созданной четырьмя катушками индуктивности для предлагаемого устройства по первому варианту и шестью катушками индуктивности для предлагаемого устройства по второму варианту, расположенными в пространстве определенным образом, обеспечивается определение координат и углового положения тела, а значит, и датчика, с помощью которого измеряют составляющие векторов магнитной индукции, при смещении и вращении тела вокруг произвольной оси. В предлагаемом техническом решении в отличие от прототипа расположение на теле только одного трехкомпонентного датчика существенно снижает воздействие на тело переменных магнитных полей, созданных катушками индуктивности.
Использование в заявляемом техническом решении вычислительного блока позволит автоматизировать процесс определения углового положения тела. Для этого выходы блоков 2 - 4 (см. фиг. 1) следует подключить, например, к ЭВМ типа IBM PC/АТ-386.
В предлагаемом устройстве катушки индуктивности могут быть выполнены в виде мер магнитного момента, а трехкомпонентные пассивные датчики могут быть реализованы из пассивных однокомпонентных индукционных датчиков (Е.Т. Чернышев, Е.Н.Чечурина, Н.Г.Чернышева, Н.В.Студенцов. Магнитные измерения. М.: Изд-во Комитета стандартов и измерительных приборов. 1969. с. 41-42, с. 59-62). Синхронные детекторы и генератор переменных напряжений могут быть выполнены аналогично как и в работе (Ю.В.Афанасьев. Феррозондовые приборы. Л.: "Энергоатомиздат". 1986. С. 132, рис. 5.3, с. 135, рис. 5.5).
Изобретение относится к области измерительной техники и может быть использовано для создания средств измерения угловых величин в автоматических схемах управления, в геомагнитной навигации, в прецизионном машиностроении и приборостроении и т.д. Магнитометрическое устройство для определения углового положения тела по первому варианту содержит трехкомпонентный пассивный датчик, расположенный на исследуемом теле, три блока синхронного детектирования, выходы которых подключены к соответствующим выходам датчика, четыре катушки индуктивности и генератор переменных напряжений, выходы которого подключены к входам блоков синхронного детектирования и выводам катушек индуктивности. Угол между осями основных катушек и угол между осями дополнительных катушек индуктивности взяты в пределах (0o;±180o). Магнитометрическое устройство для определения углового положения тела по второму варианту содержит трехкомпонентный пассивный датчик, расположенный на исследуемом теле, три блока синхронного детектирования, входы которых подключены к соответствующим выходам датчика, шесть катушек индуктивности, из которых оси каждый трех взаимно ортогональны, и генератор переменных напряжений, выходы которого подключены к входам блоков синхронного детектирования и выводам катушек индуктивности. При этом по крайней мере центры симметрии одной из вспомогательных и одной из основных катушек индуктивности размещены на оси второй основной катушки индуктивности. Технический результат заключается в уменьшении габаритов и ослабляющем воздействии переменного магнитного поля. 2 с.п.ф-лы, 3 ил.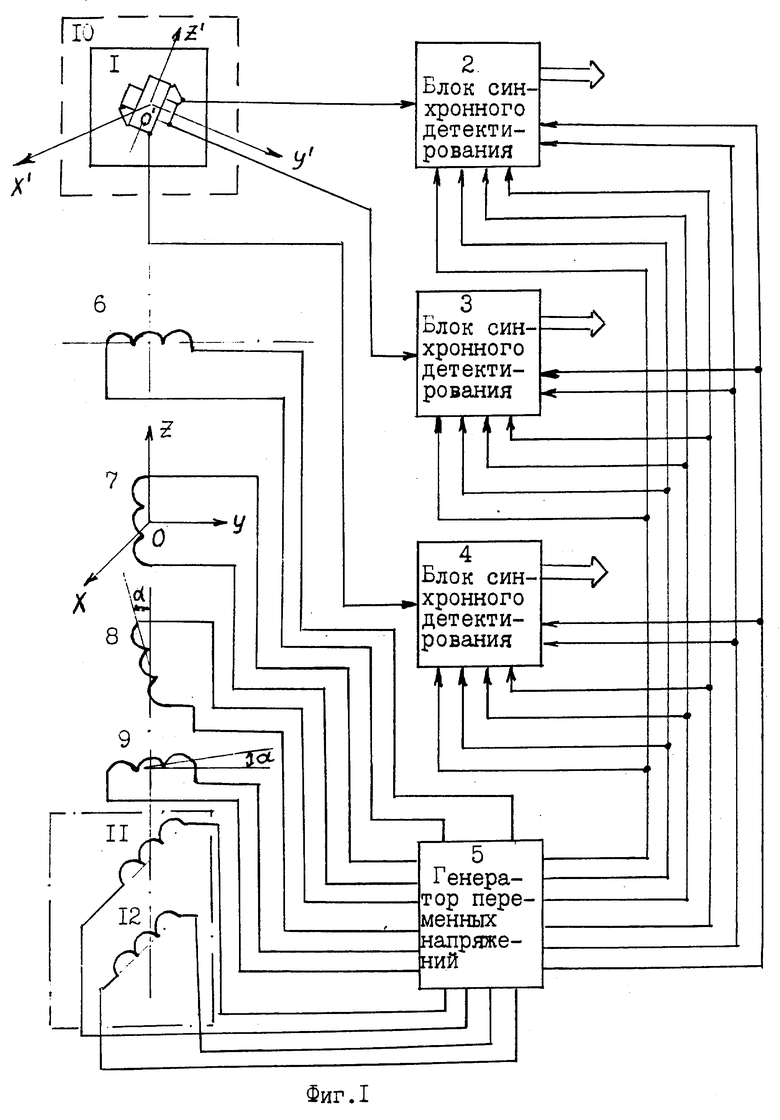
| RU 94023395 A, 10.03.96 | |||
| Способ определения магнитного момента дипольного источника поля и координат точки приложения этого момента | 1982 |
|
SU1064251A1 |
| US 3983474 A, 28.09.76 | |||
| US 4362992 A, 07.12.82. | |||

