боты. Одним из таких режимов является режим работы без ограничения скорости управляющего воздействия, поступающего на его вход, т.е. ОТЗ пропускает на вход сигналы с любой скоростью изменения за,цания, включая скачкообразное.
Наиболее близким к предлагаемому по технической сущности является способ автоматического регулирования леретоков активной мощности и частоты энергообъединения путем воздействия на задание мощности или .относительного прироста регулирующи электростанций с законом формирования управляющего воздействия в функ ции отклонения регулируемого параметра, например пропорциональноинтегрально-дифференциального, и рапределения воздействия между регулирующими электростанциями по коэффициентам долевого участия с автоматическим определением для каждой регулирующей тепловой электростан™ ции величины текущего динамического диапазона регулирования и сравнением для каждой тепловой электростанции скорости управляющего воздействия с нормальной эксплуатационной скоростью, устанавливаемой с помощью ограничителя темпа задания 2, Однако данный способ характеризуется недостаточным быстродействием всей системы автоматического управления, которое прямо пропорционально зависит от быстродейс.твия каждой регулирующей электростанции. Вследствие этого наличие случайных факторов (например, большая амплитуда отклонения регулируемого парамет изменение состава регулирующих электростанций и т.п.) приводит к тому, что в ряде случаев скорость изменения управляющего воздействия для iой ТЭС больше скорости VQT-J,-, разрешаемой .ОТЗ i-ой ТЭС. В указанных случаях фактическое изменение перегрузки 1-ой ТЭС производится со скоростьюVCTT, т.е. со скоростью меньше требуемой Vj,- из-за ограничения использования динамического диапазона регулирования i-ой ТЭС. В результате не выполняются технические требования к динамике отклонени регулируемого параметра и, как правило, возникает колебательный переходной процесс отработки отклонения регулируемого параметра, что приводит к значительному снижению быстродействия в системе управления.
Цель изобретения - повышение быстродействия.
Эта цель достигается тем, что соласно способу автоматического регулирования перетоков активной мощности и частоты энергообъединения пу.тем воздействия на дадание мсвдности или относительного прироста регулирующих электростанций с законом paгулирования управляющего воздействия в функции отклонения регулируемого параметра, например пропорциональноинтегрально-дифференциального, и распределения воздействия между регулирующими электростанциями по коэффициентам долевого участия с опреде лением для каждой регулирующей тепловой электростанции величины текущего диналадческого диапазона регулирования и сравнением для каждой регулирукицей тепловой электростанции скорости управляющего воздействия с нормальной эксплуатационной скоро стыо,- устанавливаемой с помощью ограничителя темпа задания, для каждой регулирующей тепловой электростанции определяют превышение скорости управляющего воздействия над установленной ограничителем темпа задания и при наличии текущего динамического диапазона регулирования электростанции в направлении изменения управляющего воздействия одновременно с изменением управляющего воздействия переключают ограничитель темпа задания тепловой электростанции в режим работы без ограничения скорости управляющего воздействия и производят изменение нагрузки электростанции со скоростью изменения управляющего воздействия, а при отсутствии текущего динамического диапазона регулирования тепловой электростанции в направлении изменения задания производят коррекцию коэффициента долевого участка регулирующей тепловой электростанции.
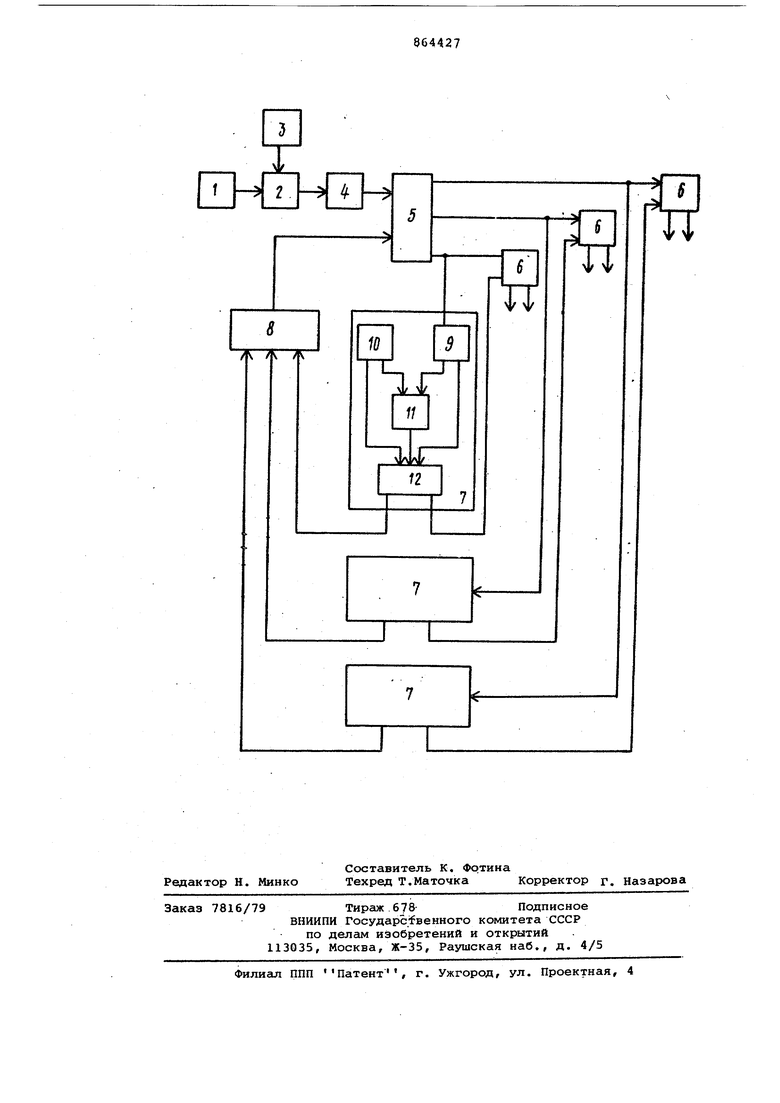
На чертеже представлена структурная схема устройства, реализующая предлагаемый способ.
Устройство содержит последовательно заключенные задатчик 1 значения уставки регулируемого параметра, элементы 2 сравнения, связанные с датчиком 3 регулируемого параметра, пропорциейально-интегргшьно-дифференциальньпа регулятор 4 и блок 5 формирования заданий регулирующим электростанциям. выход блока 5, подсоединенный к входу телеизмерения соответствующего устройства 6 в телерегулировании и телеуправления осуществляющего связь с регулятором мощности соответствуквдей регулирующей электростанишиг подключен через последовательно включенный блок 7 сравнения к входу телесигнализации соответствующего устройства 6 и через последовательно включенный блок 8 коррекции коэффициентов долевого .участка - к второму входу блока 5, Блок 7 содержит блок 9 вычисления скорости изменения управлякздего воздействия и задатчик 10 нормальной эксплуатационной скорости изменения нагрузки ТЭС, задаваемой ОТЗ электростанции, выходы которых параллельно подключены к- соотввтствукмдим входам блока 11 вычисления величины текущего динамического диапазона ре гулирования ТЭС без ограничения ско рости в направлении изменения управ ляквдего воздействия, и вместе с выходом блока 11 параллельно подключе ны к соответствующим входам блока 1 формирования сигнала управления ОТЗ и сигнала управления коррекцией коэффициента долевого участия электро станции. Предлагаемый способ осуществляет ся следующим образом; На элемент 2 сравнения подают си нал от датчика 3 регулируемого пара метра и задатчика 1 значения уставки регулируемого параметра. Формиру емый на выходе элемента 2 сравнения сигнал отклонения регулируемого параметра через пропорционально-интег рально-дифференциально регулятор 4 поступает на первый вход блока 5 формирования заданий регулирующим электростанциям. При работе автоматической системы регулирования с по мощью блока 9 производят вычисление скорости управляющего воздействия регулирующей электростанции. Значение нормальной эксплуатационной скорости изменения нагрузки каждой ТЭС устанавливают задатчиком 10. Выходные сигналы блока 9 и блока 10 используют для расчета величины текущего значения динамического диапазона регулирования электростанции. Расчет осуществляют блоком 11 вычисления величины текущего динамического диапазона регулирования ТЭС в направлении изменения управляющего воздействия в соответствии с формуло BBP-U) ±(KDD4 P:i° Al .), где DDP (t) - текущий динамический диапазон 1-ой электростанции на нагрузку(+) на нагрузку (-); KPD- - заданный процент номинальной мощности энергоблока i-Ой электрической станции, разрешающий изменение нагрузки без ограничения скорости; - суммарная номинальная мощность энергоблоков i-ой электростанции, участвующих в обработке управляющих воздействий;ДТ.- - алгебраическое значение величины очередного приращения управляющего воздействия i-ой электростанции со скоростью, превышающей значение плановой или допустимой эксплуатационной скорсэсти изменения нагрузки, згщаваемое ОТЗ i-ой элвк тростанции; - текущее значение времени с момента очередного измейения задания i-ой электростанции со скоростью, нревышакнцдй скорость, задаваемую OT3J - постоянная времени эксЗпоненциального закона восстановления динамического диапазона энергоблоков i-ой электростанции. ыходные сигналы блоков 9-11 исзуют для формирования сигнала упения ОТЗ-сигнала управления корией коэффициента долевого учаэлектростанции. Формирование ествляют блоком 12 в соответи с формут ами /Vг1U)/7VDni ) ,то ормируют , а СУ|с5у не форют; если/V -c«/7VoT5 и/Di(l)/ftyD тс ормируют СУ,;д , а не фор ют; если/YXI l-t) г то не ируют ни СУ(, ни СУ)у t V.(t) - значение скорости изменения управляющего воздействия i-ой регулирующей тэс: -значение допустимой эксплуатационной скорости изменения нагрузки i-ой регулирующей ТЭС, задаваемое ОТЗ; DDP(t) - значение динамического диапазона регулирования i-ой ТЭС без ограничения управляющего воздействия;. -минимальное допустимое значение динаи ического диапазона,при которюм допустимо изменение нагрузки без ограничения скорости -сигнал управления ог раничением темпа задания i-ой ТЭС; -сигнал управления коррекцией коэффициента долевого участия i-ой ТЭС. ыходной сигнал СУотя блока 12 т на вход телесигнализации усства 6 телерегулирования и телевления. Устройство 6 осуществляередачу сигнала СУотэ1 виде котелеуправления на i-ю регулируюТЭС. На ТЭС поступивший сигнал управления используют для авточеского перевода ОТЗ в режим рабез ограничения скорости упяющего воздействия, что приводит к повышению быстродействия всей систелал. При снятии команды телеуправления производят автоматический перевод ОТЗ в режим работы с ограни чением скорости управляющего воздействия. Другой выходной сигнал СУцвч бл ка 12 подают на соответствующий вхо блока 8 коррекции коэффициентов долевого участия, который производит уменьшение коэффициента долевого уч стия i-ой регулирующей электростанции (КДУ) до Значения, обеспечивающего VJN} € VdfTii (например, уменьшают в V -f/VOT раз) . Новое скоррек тированное значение коэффициентов долевого участия регулирующих электростанций вводят в блок 5 формирования заданий регулирунядим электростанциям. Это также приводит к повы шению быстрсщействия всей снсчетт, так как коррекция коэффициентов долевого участия осуществляется с уче том реального изменения динамических диапазонов регулирования ТЭС. В предлагаемом способе при выполнении требований правильной эксплуатации основного энергетического оборудования регулируняцих тепловых электрических станций достигается полное использование динамичес ких возможностей регулирующих ТЭС, что позволяет улучшить быстродействие системы автоматического регулирования в целом и привлекать ТЭС к автоматическому ограничению перетоков мощности и регулированию частоты. Таким образом, использование предлагаемого способа обеспечивает повышение надежности и экономичности работы энергообъединения в цело а также повышение пропускной способ ности линий, электропередач за счет увеличения быстродействия всей системы автоматического регулирования в целом. Формула изобретения Способ автоматического регулирования перетоков активной мощности и частоты энергообъединения.путем воз действия на задание мсядности или относительного прироста регулирующих электростанций с законом формирования управляющего воздействия в функции отклонения регулируемого параметра , например пропорционально-интегрально-дифференциального, и распределения воздействия между регулирующими электростанциями по коэффициентам долевого участия с определением для каждой регулирующей тепловоя электростанции величины текущего динамического диапазона регулирования и сравнением для каждой регулирувздей тепловой электростанции скорости управляющего воздействия с нормальной эксплуатационной скоростью, устанавливаемой с помощью ограничителя темпа задания, отличающийся тем, что, с целью повышения быстродействия, для каждой регулирунедей тепловой электростанции определяют превышение скорости управляющего воздействия над установленной ограничителем темпа задания и при наличии текущего динамического диапазона регулирования электростанции в направлении изменения управляющего воздействия одновременно с изменением управляющего воздействия переключают ограничитель темпа задания тепловой электростанции в режим работы без ограничения скорости управляющего воздействия и производят изменение нагрузки электростанции со скоростью изменения управляющего воздействия, а при отсутствии текущего динамического диапазона регулирования тепловой электростанции в направлении изменения задания производят коррекцию коэффициента долевого участка регулирующей тепловой электростанции. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 450284, кл. Н 02 J 3/06, 1974. 2.Авторское свидетельство СССР по заявке 2636242/07,кл.Н 02 J З/Об, 1978 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления мощностью теплофикационных агрегатов электростанции | 1985 |
|
SU1280134A1 |
| Способ автоматического регулирования частоты и перетоков мощности | 1985 |
|
SU1259404A1 |
| Устройство для автоматического регулирования перетока мощности между двумя частями энергосистемы | 1983 |
|
SU1120449A1 |
| Способ автоматического регулирования перетоков активной мощности | 1990 |
|
SU1793513A1 |
| Устройство для автоматического регулирования перетока мощности между двумя частями энергосистемы | 1978 |
|
SU864426A1 |
| Способ автоматического регулирования параметров энергосистемы | 1986 |
|
SU1467664A1 |
| Способ автоматического регулирования перетока мощности между двумя энергосистемами | 1989 |
|
SU1758765A1 |
| Способ автоматического регулирования перетока мощности между двумя частями энергосистемы | 1985 |
|
SU1257743A1 |
| Устройство для автоматического регулирования частоты и перетока активной мощности энергообъединения | 1983 |
|
SU1136250A1 |
| СПОСОБ РАСПРЕДЕЛЕНИЯ УПРАВЛЯЮЩИХ ВОЗДЕЙСТВИЙ МЕЖДУ ЭЛЕКТРОСТАНЦИЯМИ, УЧАСТВУЮЩИМИ В АВТОМАТИЧЕСКОМ РЕГУЛИРОВАНИИ ЧАСТОТЫ И ПЕРЕТОКОВ АКТИВНОЙ МОЩНОСТИ | 2023 |
|
RU2815863C1 |