Изобретение относится к электротехнике и может быть использовано для автоматического регулирования параметров энергосистемы, например частоты, напряжения, перетоков обменной мощности.
Цель изобретения - повышение на-- .дежности и эффективности процесса регулирования параметров энергосистемы и снижение износа регулирующего оборудования.
На фиг.1 представлена схема энергообъединения; на фиг. 2 - блок-схема устройства, реализующего способ; на фиг.З - схема блока формирования признака участия регулирующей электростанции (РЭС) в подавлении отклонений параметров; на фиг.4 - схема блока
314
формирования коэ(фициентов долевого участка (КДУ) РЭС; на фиг.5 - схема ком1 татора.
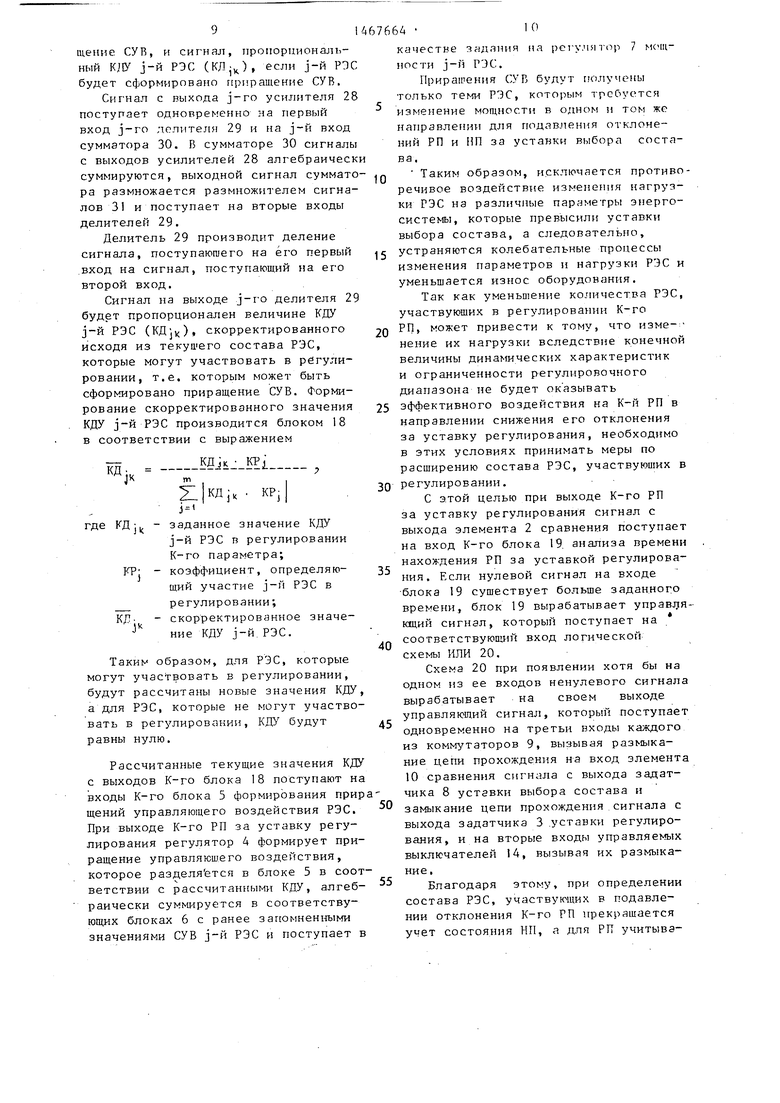
Рассмотрим реализацию предлагаемого способа при его использовании для автоматического-регулирования параметров энергообъединения, упрощенная схема которого представлена кольцевой сетью, связанной с Единой энергосистемой двумя внешними связями в узлах которой сосредоточены РЭС (фиг.1). На фиг, 1 показаны A,B,C,D, Е - линии электропередачи, причем А и Е - внешние связи; РЭС, располо- женные в узлах объединения, а также направления перетоков активной мощности.
При таком направлении перетоков все РЭС имеют положительные коэффици енты влияния изменения мощности на перетоки по. линиям Л и Е. Для всех остальных линий справедливо следующее правило: РЭС имеет положительный коэффициент влияния на переток по линии, находящейся слева от нее, и отрицательный - на переток по линии, находящейся справа. Для простоты считаем, что коэффициенты влияния каждой РЭС на перетоки по всем линия больше заданного минимального значения.
В рассматриваемой системе автоматическими ограничителями перетока (АОП) оснащены линии А и Е, т.е. внешние связи объединения. Для линий А и Е заданы уставки ограничения, выход за них перетоков по этим линиям вызывает работу АОП, своим управляющим воздействием изменятпим нагрузку РЭС. Кроме того, для всех линий заданы, уставки выбора состава, например, это могут быть уставки диспетчер ской предупредительной сигнализации.
Пусть переток по линии Е возрос и превысил уставку ограничения. Одновременно переток по лини С превысил уставку выбора состава. Исходя из сформулированного правила определяют необходимые направления измене ния нагрузки каждой РЭС для подавления отклонений перетоков по линиям С и Е. Очевидно, что для подавления отклонения ;по линии Е все РЭС должны менять СВОЮ нагрузку в направлении снижения для подавления отклонения по линии С. Одни РЭС должны изменять свою нагрузку в направлении увели-
чения, а другие РЭС - в направлении сииже 1ия. Таким образом, только последние РЭС для подавления отклонения как по линии С, так и по линии Е должны изменять свою нагрузку в одном и том же направлении. Поэтому приращения управляющих воздействий будут сформированы только этими РЭС. Изменение нагрузки этих РЭС будет одновременно эффективно подавлять отклонения перетоков по линиям С и Е. При этом повышается надежность и эффективность процесса регулирования, поскольку исключается колебательный процесс изменения перетоков, а также снижа.Q
-jn 25 м ,д 40
45
35м р
55
50
ется износ оборудования РЭС, так как не возникает необходимость реверсивного изменения нагрузки.
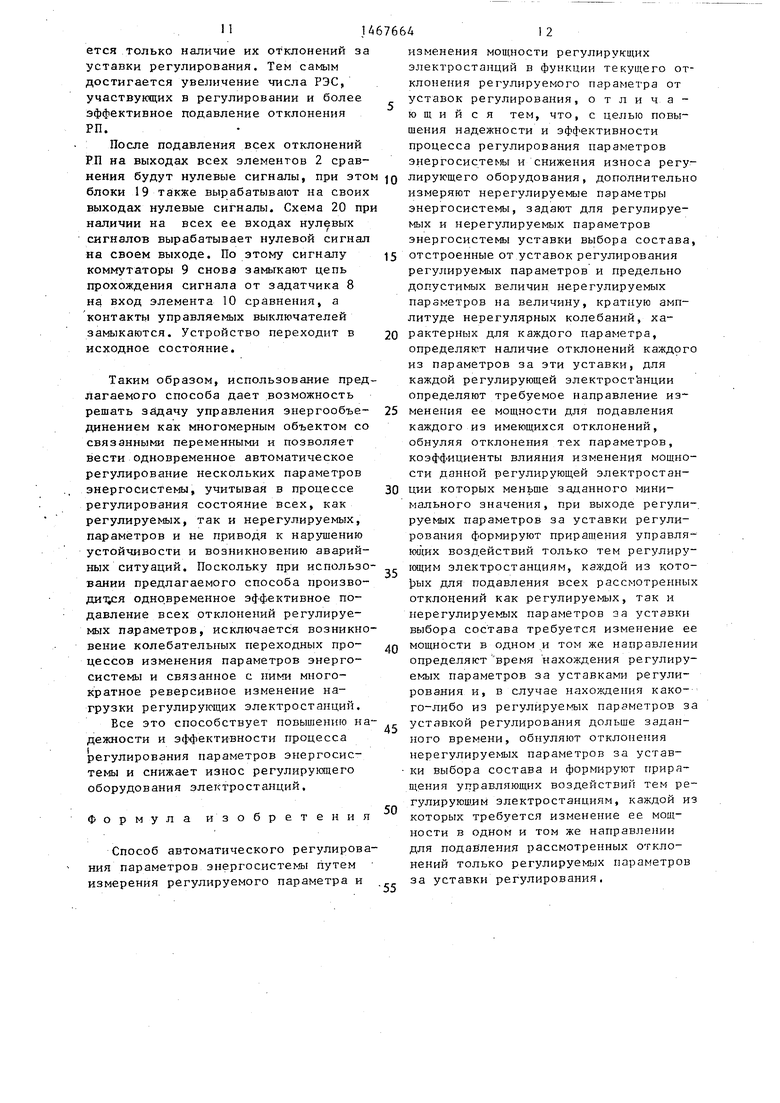
Устройство (фиг.2) содержит по числу регулируемых параметров последовательно соединенные измеритель 1 регулируемого параметра (РП), элемент 2 сравнения, второй вход которого связан с задатчиком 3 уставки РП, пропорционально-интегрально-дифферен- циальный регулятор 4 и блок 5 форьи- рования приращений управляющего воздействия РЭС.
В соответствии с числом РЭС устройство содержит блоки 6 формирования результирующих управляющих воздействий РЭС, входы каждого из кото- соответствукщими вы- 5, а выход соединен 7 мощности соответствурь1х связаны с ходами блоков ,с регулятором юшей РЭС.
Кроме того, устройство содержит по числу РП задатчик 8 уставки выбора состава для РП, коммутатор 9, первый вход которого подключен к выходу за- датчика 8, а второй вход соединен с выходом задатчика 3, элемент 10 сравнения, первый вход которого соединен с, выходом измерителя 1 , а второй вход связан с выходом коммутатора 9.
Устройство содержит также по числу нерегулируемых параметров (НП) измеритель П НП, задатчик 12 уставки выбора состава для НП, элемент 13 сравнения, первый вход которого соединен с выходом измерителя 1, а второй вход с выходом задатчика 12, управляемый выключатель 14, первый вход которого связан с выходом элемента 13 сравнения.
По числу РП и НП устройство содержит размножители 15 сигналов.
причем для РП вход размножителя 1Ь связан с выходом элемента 10 сравнения, а для МП вход размножителя 15 соединен с выходом управляемого выключателя 14.
Кроме того, устройство содержит по числу РЭС коммутатор 16, блок 17 формирования признака участия РЭС в подавлении отклонений параметров, причем входы первого блока 17 через первый коммутатор 16 связаны с первыми выходами размножителей 15, входы второго блока 17 соответственно с вторыми выходами размножителей 15 и т.д.; по числу РП блок 18 формирования коэффициентов долевого участия (КДУ) РЭС, связанный входами с выхддами блоков 17, а выходами соединенный ,с входами соответствующего блока 5. Устройство также содержит по числу РП блок 19 анализа времени нахождения РП за уставкой регулирования, выход которого связан с выходом
10
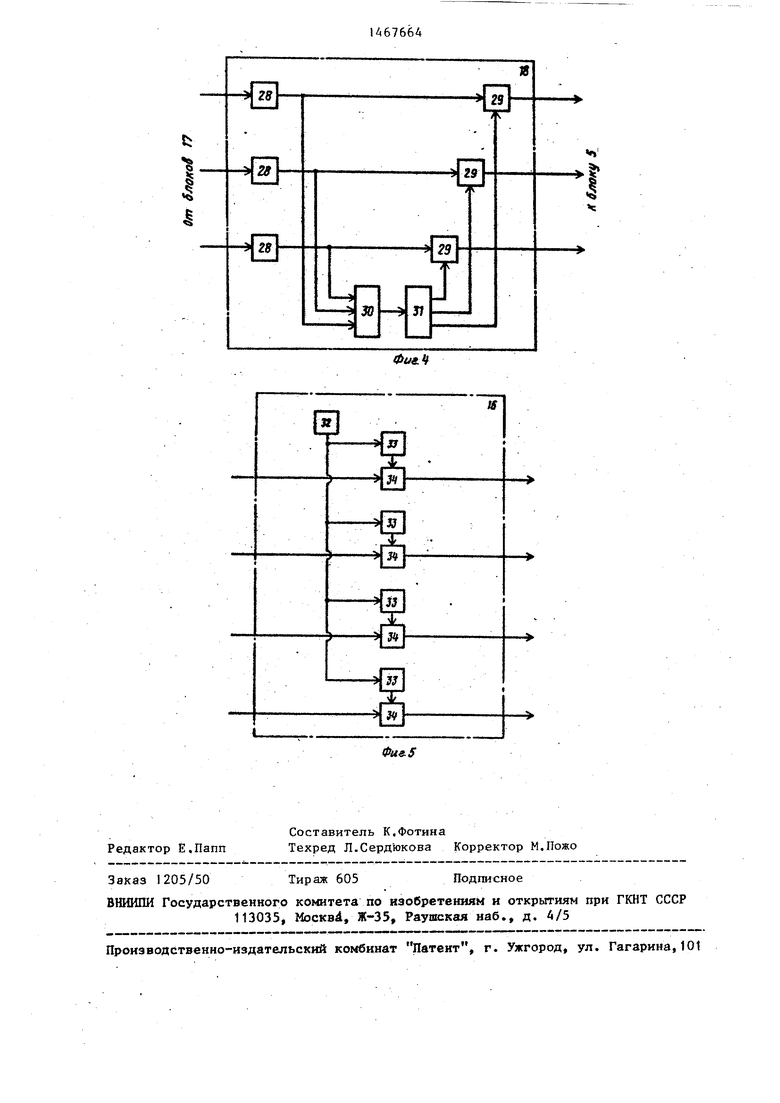
ствуюшим входом сумматора 30, выход сумматора 30 через размножитель сигналов 31 подключен к вторым входам делителей 29, выходы делителей 29 являются одновременно выходаьят блока
18.
Коммутатор 16 (фиг.5) содержит за- датчик 32 минимального коэффициента влияния, а также по чиспу РП и НП блоки 33 и управляемые выключатели 34
Выход задатчика 32 связан, одновременно с входами всех блоков 33. Первые входы выключателей 34 являются 15 одновременно входами коммутатора 16, вторые входы соединены с выходами соответствующих блоков 33, а выходы являются одновременно выходами коммутатора 16.
Способ осуществляется следукхцим
образом.
С помощью задатчиков 8 задают уставки выбора состава для РП, причем такие, что они дблжны быть мень20
элемента 2 сравнения, логическую схе- 25 ще, чем уставки регулирования, зада- му ИЛИ 20, входы которой соединены с ваемые соответствующими задатчиками выходами блоков 19, а выход подключен 3. С помошьк, задатчиков 12 задаются
уставки выбора состава для Ни. Б
одновременно к третьим входам коммутаторов 9 и вторым входам управляемых выключателей 14.
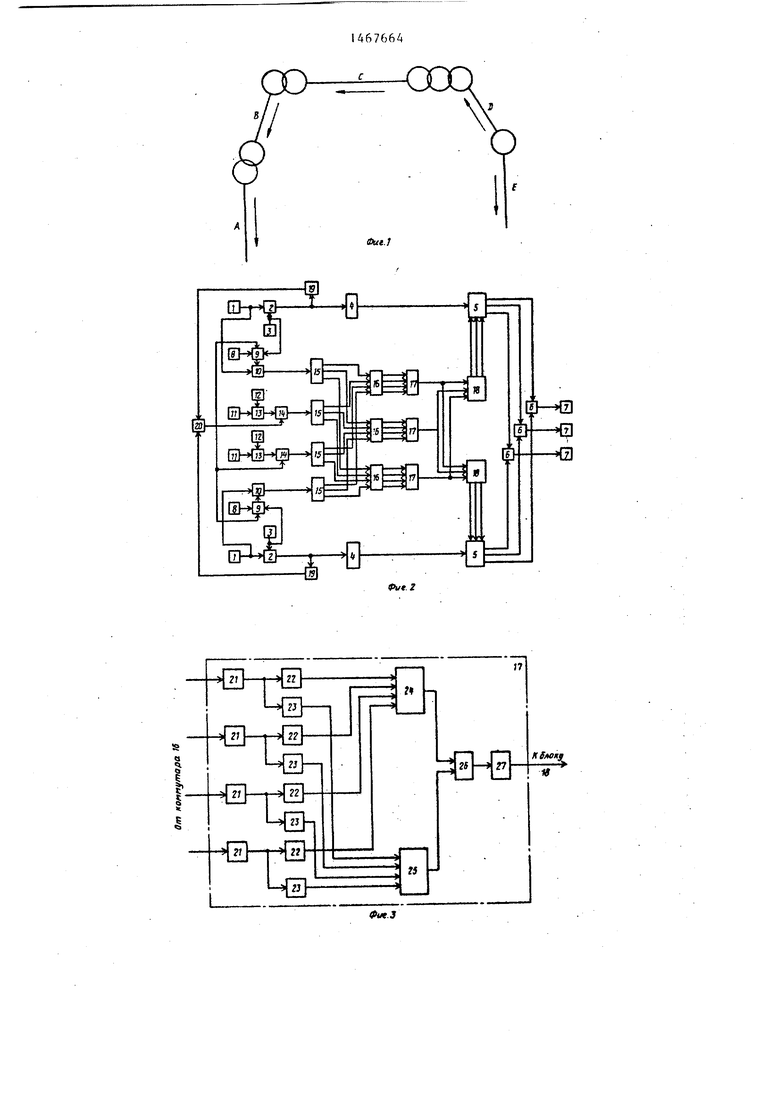
Блок 17 (фиг.З) содержит по числу РП и НП усилители 21, усилители 22, усилители 23, а также сумматор 24, сумматор 25, логическую схему П 26 и инвертор 27.
Входы усилителей 21 являются одновременно входами блока 17, выход каждого усилителя 21 связан одновременно с входом соответствующего усилителя
22и входом соответствующего усилителя 23, выход каждого усилителя 22 связан с соответствующим входом сумматора 24, а выход каждого усилителя
23подключен к соответстсвующему входу сумматора 25, первый вход схемы 26 соединен с выходом сумматора 24, ее второй вход - с выходом сумматора, 25, а выход подключен к входу инвертора 27, выход инвертора 27 является одновременно выходом блока
17.
Блок 18 (фиг.4) содержит по числу РЭС умножители 28, делители 29, а также сумматор 30 и размножитель 31
качестве уставок выбора состава для 30 РП и НП можно принять, например, уставки диспетчерской предупредительной сигнализации,
Б исходном состоянии, когда ни один из РП не нарушил уставку регулирования, каждый из коммутаторов 9 замыкает цепь прохождения на вход соответствующего элемента 10 сравнения сигнала с выхода задатчика 8, а контакты каждого из управляемых выключателей 14 находятся в замкнутом
35
40
положении,
При выходе каких-либо из РН или НП за уставки выбора состава, на выходах 45 соответствующих элементов 10 или 13 сравнения появляются ненулевые сигнаг ЛЬ . Каждый из этих сигналов размножается соответствующим размножителем 15 и поступает одновременно на соответствуюашй вход каждого из мутаторов 16.
Коммутатор 16 пропускает на свой i-й выход сигнал , , либо обнуляет этот сигнал, если коэффициент илия50
также сумма lup vj и po-.i-.-«jv 4i - -,
сигналов. Входы умножителей 28 явля- 55 №я изменения мощности д-и РЭС на
ются одновременно входами блока 18, выход каждого y нoжитeля 28 связан одновременно с первым входом соответствующего делителя. 29 и соответi-й параметр меньше заданного минимального значения.
Работа коммутатора 16 происходит следующим образом.
10
7664
ствуюшим входом сумматора 30, выход сумматора 30 через размножитель сигналов 31 подключен к вторым входам делителей 29, выходы делителей 29 являются одновременно выходаьят блока
18.
Коммутатор 16 (фиг.5) содержит за- датчик 32 минимального коэффициента влияния, а также по чиспу РП и НП блоки 33 и управляемые выключатели 34.
Выход задатчика 32 связан, одновременно с входами всех блоков 33. Первые входы выключателей 34 являются 15 одновременно входами коммутатора 16, вторые входы соединены с выходами соответствующих блоков 33, а выходы являются одновременно выходами коммутатора 16.
Способ осуществляется следукхцим
образом.
С помощью задатчиков 8 задают уставки выбора состава для РП, причем такие, что они дблжны быть мень20
ставки выбора состава для Ни. Б
качестве уставок выбора состава для П и НП можно принять, например, уставки диспетчерской предупредительной сигнализации,
Б исходном состоянии, когда ни один из РП не нарушил уставку регулирования, каждый из коммутаторов 9 замыкает цепь прохождения на вход соответствующего элемента 10 сравнения сигнала с выхода задатчика 8, а контакты каждого из управляемых выключателей 14 находятся в замкнутом
положении,
При выходе каких-либо из РН или НП за уставки выбора состава, на выходах 45 соответствующих элементов 10 или 13 сравнения появляются ненулевые сигнаг ЛЬ . Каждый из этих сигналов размножается соответствующим размножителем 15 и поступает одновременно на соответствуюашй вход каждого из мутаторов 16.
Коммутатор 16 пропускает на свой i-й выход сигнал , , либо обнуляет этот сигнал, если коэффициент илия50
,
№я изменения мощности д-и РЭС на
i-й параметр меньше заданного минимального значения.
Работа коммутатора 16 происходит следующим образом.
С помощью задатчика 32 задают минимальное значение коэффициента влияния j-й РЭС ( ) , которое поступает одновременно во все блоки 33. В памяти i-ro блока 33 содержится значение коэффициента влияния j-й РЭС на i-й параметр энергосисте- J) (KVj; ), В случае, если значение KV j; больше минимального, на выходе блока 33 появляется управляющий сиг- нал, по которому i-й выключатель 34 замыкает цепь прохождения на выход коммутатора 16 сигнала отклонения i-ro параметра энергосистемы, В противном случае сигнал на выходе i-ro блока 33 отсутствует, i-й выключатель 34 размыкает соответствующую цепь и на i-M выходе коммутатора 16 появляется нулевой сигнал.
Блок 17 производит формирование признака участия i-й РЭС в подавлении отклонений параметров. Работа j-ro блока 17 осуществляется следующим образом.
Каждьш из усилителей 21 имеет коэф-фициент усиления, обратно пропорциональный коэффициенту влияния изменения мощности j-й РЭС на i-й параметр (1/KVj; ). На вход усилителя 2 поступает сигнал ;, пропорциональны величине отклонения i-ro параметра за уставку выбора состава. Таким образом, амплитуда сигнала на выходе усилителя 21 пропорциональна требуемой величине изменения нагрузки j-й РЭС для подавления отклонения i-ro параметра, а его знак определяет направление требуемого изменения нагрузки j-й РЭС,
Сигнал с выхода i-ro усилителя 21 поступает одновременно на вход i-ro усилителя 22 и i-ro усилителя 23. Усилитель 22 имеет коэффициент усиления 1 для положительных сигналов и коэффициент усиления О для отрицательных сигналов. Усилитель 23 имеет коэффициент усиления 1 для отрицательных сигналов и коэффициент усиления О для положительных сих на- лов. Таким образом, усилитель 22 пропускает на свой выход только положительные сигналы, а усилитель 2 только отрицательные.
Сигналы с ВЫХОДО.В усилителей 22 суммируются : в сумматоре 24, а сигналы с выходов усилителей 23 - в сумматоре 25. -Сигнал на выходе сумматора 24 будет пропорционален требуемому
0
5
0
5
0
5
0
5
для подавления отклонений параметров за уставки выбора состава изменению мощности j-й РЭС в сторону загрузки, а сигнал на выходе сумматора 25 - в сторону разгрузки. Наличие на выходах обоих сумматоров 24 и 25 ненулевых сигналов говорит о том, что сочетание отклонений РП и НП за уставки выбора состава таково, что для подавления одних из них требуется увеличение нагрузки j-й РЭС, а для подавления отклонений других - снижение ее нагрузки. В этом случае j-я РЭС не может участвовать в подавлении отклонений РП и НП. Если же на выходе хотя бы одного из сумматоров будет нулевой сигнал, то j-я РЭС может участвовать в подавлении отклонений РП и НП, так как для их подавления требуется изменение ее нагрузки только в одном направлении.
Логическая схема И 26 формирует на своем выходе единичный сигнал только в случае, если на обоих ее входах будут ненулевые сигналы. При любом другом сочетании входных сигналов на выходе схемы 26 формируется нулевой сигнал.
Сигнал с выхода схемы 26 инвертируется инвертором 27 и, таким обра- .зом, на выходе j-ro блока 17 будет единичный сигнал, если j-й РЭС может быть сформировано приращение СУВ, и нулевой сигнал, если не может.
Совокупность единичных сигналов на выходах всех блоков 17 (КР: ) определяет состав РЭС, которым может быть сф.ормировано приращение СУВ,
Сигналы с выходов каждого из блоков 17 одновременно поступают на соответствующие входы каждого из блоков 18, где происходит формирование КДУ РЭС в регулировании К-го РП,
Работа К-го блока 18 происходит следующим образом.
Перед вводом устройства в работу в качестве коэффициентов усиления усилителей 28 вводятся КДУ соответствую- пщх РЭС в регулировании К-го РП, заданные из условия участия в регулировании последнего всех РЭС (КД-). На вход j-ro усилителя 28 поступает сигнал с выхода j-ro блока 17 (КР ), который определяет, будет ли j-й РЭС сформировано приращение СУВ, Таким образом, на выходе j-ro усилителя 28 будет нулевой сигнал, если j-й РЭС не будет сформировано приращение СУ В, и сиг ал, пропорциональный КЛУ j-й РЭС (КД(х) слн j-H РЭС будет сформировано приращение СУВ.
Сигнал с выхода j-ro усилителя 28 поступает одновременно на первый вход j-ro делителя 29 и на j-й вход сумматора 30. В сумматоре 30 сигналы с выходов усилителей 28 алгебраическ суммируются, выходной сигнал сумматора размножается размножителем сигналов 31 и поступает на вторые входы делителей 29.
Делитель 29 производит деление сигнала, поступающего на его первый .вход на сигнал, поступающий на его второй вход.
Сигнал на выходе j-ro делителя 29 будет пропорционален величине КДУ j-й РЭС () скорректированного исходя из текушего состава РЭС, которые могут участвовать в регулировании, т.е. которым может быть сформировано приращение СУВ. Формирование скорректированного значения КДУ j-й РЭС производится блоком 18 в соответствии с выражением
КД
J
е КД; - заданное значение КДУ
j-й РЭС в регулировании К-го параметра; коэффициент, определяющий участие j-й РЭС в регулировании; скорректированное значение КДУ j-й.РЭС.
4k
КР;
Таким образом, для РЭС, которые могут участвовать в регулировании, будут рассчитаны новые значения КДУ, а для РЭС, которые не могут участвовать в регулировании, КДУ будут равны нулю.
Рассчитанные текущие значения КДУ с выходов К-го блока 18 поступают на эходы К-го блока 5 формирования прирщений управляющего воздействия РЭС. При выходе К-го РП за уставку регулирования регулятор 4 формирует приращение управляющего воздействия, которое разделяется в блоке 5 в соответствии с рассчитанными КДУ, алгебраически суммируется в соответствующих блоках 6 с ранее запомненными значениями СУВ j-й РЭС и поступает в
10
20
а67664
качестве задания на регулятор 7 кчд- ности j-й РЭС.
Прирашения СУВ будут получены только теми РЭС, которым требуется изменение мощности в одном и том же направлении для подавления отклонений РП и ЦП за уставки выбора состава.
Таким образом, исключается противоречивое воздействие изменения нагрузки РЭС на различные параметры энергосистемы, которые превысили уставки выбора состава, а следовательно, 15 устраняются колебательные процессы изменения параметров и нагрузки РЭС и уменьщается износ оборудования.
Так как уменъпюние количества РЭС, участвующих в регулировании К-го РП, может привести к тому, что изме- нение их нагрузки вследствие конечной величины динамических характеристик и ограниченности регулировочного диапазона ие будет оказывать 25 эффективного воздействия на К-й РП в направлении снижения его отклонения за уставку регулирования, необходимо в этих условиях принимать меры по расширению состава РЭС, участвующих в 30 регулировании.
С этой целью при выходе К-го РП за уставку регулирования сигнал с выхода элемента 2 сравнения поступает на вход К-го блока 19. анализа времени нахождения РП за уставкой регулирования. Если нулевой сигнал на входе блока 19 существует больше заданного времени, блок 19 вырабатывает управля- кщий сигнал, который поступает на . соответствующи вход логической схемы ИЛИ 20.
Схема 20 при появлении хотя бы на одном из ее входов ненулевого сигнала вырабатывает на своем выходе управляющий сигнал, который поступает одновременно на третьи входы каждого из коммутаторов 9, вызывая размыкание цепи прохождения на вход элемента 10 сравнения сигнала с выхода задат- чика 8 уставки выбора состава и замыкание цепи прохождения сигнала с выхода задатчика 3 .уставки регулирования, и на вторые входы управляемых выключателей 14, вызывая их размыкание ,
Благодаря этому, при определении состава РЭС, участвующих в подавлении отклонения К-го РП прекращается учет состояния НП, а для РГТ учитыва35
40
45
50
55
П,U
ется только наличие их отклонений за уставки регулирования. Тем самым достигается увеличение числа РЭС, участвукщих в регулировании и более эффективное подавление отклонения РП.
После подавления всех отклонений РП на выходах всех элементов 2 срав
изменения мощности регулирующих электростанций в функции текущего отклонения регулируемого параметра от уставок регулирования, отличающийся тем, что, с целью повышения надежности и эффективности процесса регулирования параметров энepгocиcтe ы и снижения износа регу
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического ограничения перетоков мощности электропередач | 1990 |
|
SU1778861A1 |
| Способ автоматического ограничения перетока мощности электропередачи | 1990 |
|
SU1823069A1 |
| Способ автоматического регулирования параметров энергосистемы "Юлика | 1984 |
|
SU1297166A1 |
| Способ автоматического регулирования перетоков мощности | 1988 |
|
SU1697182A1 |
| Устройство для автоматического регулирования частоты и перетока активной мощности энергообъединения | 1983 |
|
SU1136250A1 |
| Способ автоматического ограничения перетока мощности между двумя энергосистемами | 1989 |
|
SU1778860A1 |
| Способ автоматического регулирования перетока мощности | 1990 |
|
SU1774431A1 |
| Способ автоматического регулирования перетоков активной мощности | 1990 |
|
SU1793513A1 |
| Способ автоматического ограничения перетока мощности между двумя энергосистемами | 1989 |
|
SU1809492A1 |
| Способ автоматического регулирования перетока мощности | 1990 |
|
SU1809493A1 |
Изобретение относится к электротехнике и может быть использовано для автоматического регулирования параметров энергосистемы, в частности перетоков активной мощности и частоты. Цель изобретения - повышение надежности и эффективности процесса автоматического регулирования пара- Метров энергосистемы, а также снижения износа регулирукщего оборудования. Для этого в каждый момент времени анализируют состояние как регулируемых, так и нерегулируемых параметров энергосистемы, т.е. тех, которые непосредственно не контролируются системными регуляторами. На основании этого анализа определяют состав регулирующих электростанций, которые могут изменением своей нагрузки подавлять все существующие в этот момент отклонения параметров энергосистемы, не ухудшая состояние ни одного из них, и формируют регулиру- юп им электростанциям управляющие воз-, действия в функции отклонений регулируемых параметров. В случае недостаточно эффективного воздействия выбранных регулирующих электростанций на регулируемые параметры, не обеспечивающие подавления их отклонений за заданное время, прекращают учет состояния нерегулируемых параметров и определяют состав регулирующих электростанций, изменение нагрузки которых не ухудщает состояние ни одного из регулируемых параметров энергосисте- Nbi. 5 ил. сл 05 О5 05 4
нения будут нулевые сигналы, при этом JQ лирующего оборудования, дополнительно
блоки 19 также вырабатывают на своих выходах нулевые сигналы. Схема 20 при наличии на всех ее входах нулевых сигналов вырабатывает нулевой сигнал на своем выходе. По этому сигналу коммутаторы 9 снова замыкают цепь прохождения сигнала от задатчика 8 на вход элемента 10 сравнения, а контакты управляемых выключателей замыкаются. Устройство переходит в исходное состояние.
Таким образом, использование предлагаемого способа дает возможность решать задачу управления энергообъединением как многомерным объектом со связанными переменными и позволяет вести одновременное автоматическое регулирование нескольких параметров энергосистемы, учитывая в процессе регулирования состояние всех, как регулируемых, так и нерегулируемых, параметров и не приводя к нарушению устойчивости и возникновению аварийных ситуаций. Поскольку при использовании предлагаемого способа произво- одно.временное эффективное подавление всех отклонений регулируемых параметров, исключается возникновение колебательных переходных процессов изменения параметров энергосистемы и связанное с ними многократное реверсивное изменение нагрузки регулирующих электростанций.
15
20
25
30
35
40
измеряют нерегулируемые параметры энергосистемы, задают для регулируемых и нерегулируемых параметров энергосистемы уставки выбора состава, отстроенные от уставок регулирования регулируемых параметров и предельно допустимых величин нерегулируемых параметров на величину, кратную амплитуде нерегулярных колебаний, характерных для каждого параметра, определяют наличие отклонений каждрго из параметров за эти уставки, для каждой регулирующей электрост анции определяют требуемое направление изменения ее мощности для подавления каждого из имеющихся отклонений, обнуляя отклонения тех параметров, коэффициенты влияния изменения мощности данной регулирующей электростанции которых меньше заданного минимального значения, при выходе регули-. руемых параметров за уставки регулирования формируют приращения управля- ющих воздействий только тем регулирующим электростанциям, каждой из кото- для подавления всех рассмотренных отклонений как регулируемых, так и нерегулируемых параметров за уставки выбора состава требуется изменение ее мощности в одном и том же направлении определяют время нахождения регулируемых параметров за уставками регулирования и, в случае нахождения какого-либо из регулируемых параметров за
Все это способствует повышению на- уставкой регулирования дольше задандежности и эффективности процесса регулирования параметров энергосистемы и снижает износ регулирующего оборудования электростанций,
формула изобретения
50
иого времени, обнуляют отклонения нерегулируемых параметров за уставки выбора состава и формируют приращения управляющих воздействий тем ре гулируюшлм электростанциям, каждой и которых требуется из1-1енение ее мощности в одном и том же направлении для подавления рассмотренных отклонений только регулируемых параметров за уставки регулирования,
Способ автоматического регулирования параметров энергосистемы путем измерения регулируемого параметра и
0
5
0
5
0
измеряют нерегулируемые параметры энергосистемы, задают для регулируемых и нерегулируемых параметров энергосистемы уставки выбора состава, отстроенные от уставок регулирования регулируемых параметров и предельно допустимых величин нерегулируемых параметров на величину, кратную амплитуде нерегулярных колебаний, характерных для каждого параметра, определяют наличие отклонений каждрго из параметров за эти уставки, для каждой регулирующей электрост анции определяют требуемое направление изменения ее мощности для подавления каждого из имеющихся отклонений, обнуляя отклонения тех параметров, коэффициенты влияния изменения мощности данной регулирующей электростанции которых меньше заданного минимального значения, при выходе регули-. руемых параметров за уставки регулирования формируют приращения управля- ющих воздействий только тем регулирующим электростанциям, каждой из кото- для подавления всех рассмотренных отклонений как регулируемых, так и нерегулируемых параметров за уставки выбора состава требуется изменение ее мощности в одном и том же направлении определяют время нахождения регулируемых параметров за уставками регулирования и, в случае нахождения какого-либо из регулируемых параметров за
0
иого времени, обнуляют отклонения нерегулируемых параметров за уставки выбора состава и формируют приращения управляющих воздействий тем ре- гулируюшлм электростанциям, каждой из которых требуется из1-1енение ее мощности в одном и том же направлении для подавления рассмотренных отклонений только регулируемых параметров за уставки регулирования,
Лиг.}
Л
-и
Ч
| Устройство для автоматического регулирования частоты и активной мощности энергообъединения | 1974 |
|
SU556535A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
