(54) МАГНИТНЫЙ ВЙБРОИЗОЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитный виброизолятор | 1988 |
|
SU1597464A1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ПЕРЕКЛЮЧАТЕЛЬ | 1995 |
|
RU2097804C1 |
| ВИБРОИЗОЛИРУЮЩАЯ МАГНИТНАЯ ОПОРА (ВАРИАНТЫ) | 2011 |
|
RU2477399C1 |
| Управляемый динамический виброгаситель | 1982 |
|
SU1190113A1 |
| Ленточно-отрезной станок | 2021 |
|
RU2764249C1 |
| В. М. ПАРШИНГ'«^д^|1ГзиГ1 | 1968 |
|
SU221106A1 |
| УСТРОЙСТВО ДЛЯ ЦИФРОВОЙ ИНДИКАЦИИ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 1992 |
|
RU2071594C1 |
| УСТРОЙСТВО ВИБРОИЗОЛЯЦИИ С АРРЕТИРОВАНИЕМ | 2012 |
|
RU2499924C1 |
| Двигатель возвратно-поступательного движения | 1990 |
|
SU1758789A1 |
| ЭЛЕКТРОИНДУКЦИОННАЯ ИГРА "ЛОЦМАН" | 1991 |
|
RU2088294C1 |
1
Изобретение относится к средствам, виброизоляции различных объектов.
Известно устройство, содержащее . подвижный и неподвижные магниты 11 .
Недостатком устройства является малая эффективность виброгашения в широком диапазоне частот.
Наиболее близким к предлагаемо по технической сущности и достигаемому результату является магнит-т ный виброизолятор, содержащий связанный с объектом подвижный и неподвижный магниты, силовые линии которых направлены перпендикулярно перемещению подвижного магнита 12,
Недостатком устройства является малая эффективность, обусловленная постоянной жесткостью виброизолятора.
Цель изобретения - повышение эффективности виброгашения.
Указанная цель достигается .тем, что магниты выполнены с прямоуголь-; ными полюсами, а виброизолятор снабжен системой автоматического управления, содержащей управляющие об--мотки, размещенные на магнитах, устанавливаемый на объекте датчик.и соединенные с ним последовательно корректрирующее устройство и управ-. ляемый источник питания постояййого
тока, выход которого соединен со входом обмоток, а подвижный магнит выполнен из материала, имеющего свойство магнитострикдии.
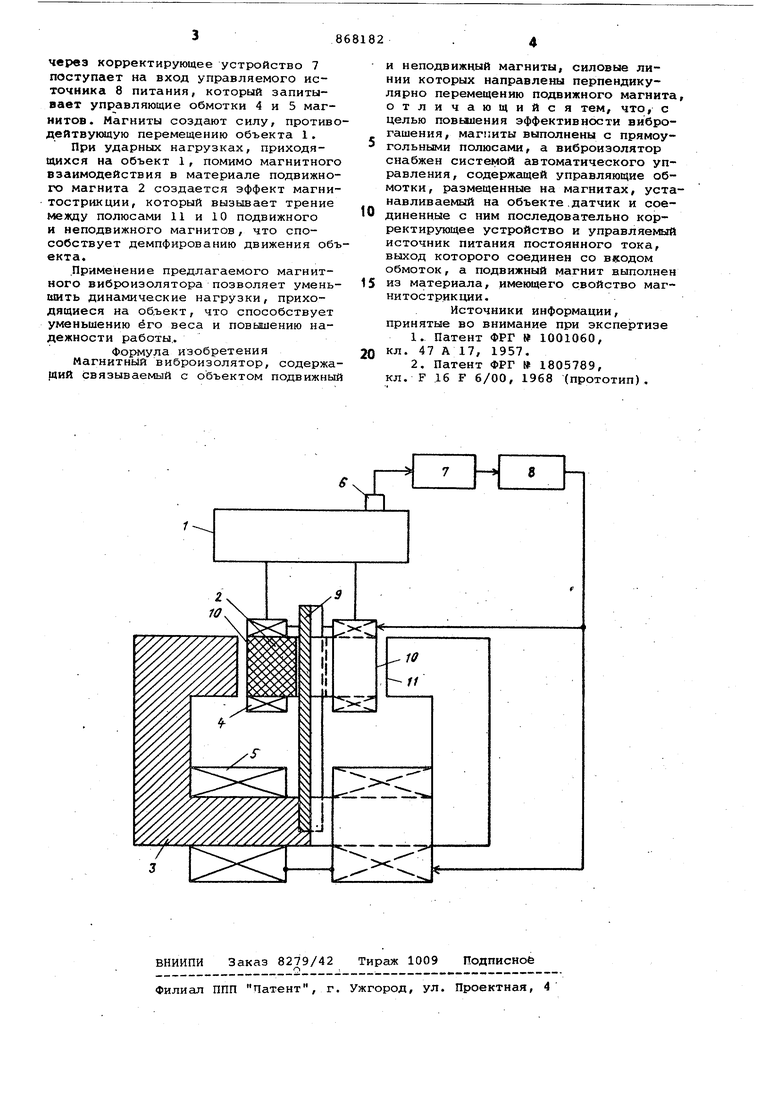
На чертеже изображена схема магнитного виброизрля.тора.
Устройство содержит связанный с объектом 1 подвыжный 2 и неподвижный 3 магниты, силовые линии которых
10 перпендикулярны перемещению подвижного магнита 2, управляющие обмотки 4 и 5, размещенные на магнитах, устанавливаемый на объекте 1 датчик 6 и соединенные с ним последовательно
15 корректирующее устройство 7 и управляемый источник 8 питания постоянного ток.а, выход которого соединен с обмотками. Подвижный магнит 2 выполнен из магнитострикционного ма20териала и перемещается по направляющей 9. .
Виброизолятор работает следующим образом.
При отсутствии возмущающих воз25действий подвижный магнит 2 занимает устойчивое положение равновесия между полюсами 10 н 11 непрдвижного магнита 3. При действии возмущений, приходящих на объект 1, последний перемещается, сигнаш с датчика 6
30
через корректирующее устройство 7 поступает на вход управляемого источника 8 питания, который запитывает управляющие обмотки 4 и 5 магнитов. Магниты создают силу, противодейтвукидую перемещению объекта 1.
При ударных нагрузках, приходяuwxcH на объект 1, помимо магнитного взаимодействия в материале подвижного магнита 2 создается эффект магнитострикции, который вызывает трение межцу полюсами 11 и 10 подвижного и неподвижного магнитов, что способствует демпфированию движения объекта.
.Применение предлагаемого магнитного виброизолятора позволяет уменьшить динамические нагрузки, приходящиеся на объект, что способствует уменьшению его веса и повышению надежности работы..
Формула изобретения
магнитный виброизолятор, содержащий связываемый с объектом подвижный
и неподвижный магниты, силовые линии которых направлены перпендикулярно перемещению подвижного магнита отличающийся тем, что, с целью повышения эффективности виброгашения, магниты выполнены с прямоугольными полюсами, а виброизолятор снабжен системой автоматического управления, содержащей управляющие обмотки, размещенные на магнитах, устанавливаемый на объекте.датчик и соединенные с ним последовательно корректирующее устройство и управляемый источник питания постоянного тока, выход которого соединен со в содом обмоток, а подвижный магнит выполнен из материала, имеющего свойство магнитостр.икции.
Источники информации, принятые во внимание при экспертизе
кл. F 16 F 6/00, 1968 (прототип).
