Известны системы управления гидравлическим сервоприводом с проточными полостямн рабочего цилиндра, управляемого новоротным золотником, использующие магнитосоленоидные элементы новоротного тина.
Предложенная система отличается от известных тем, что обмотки управляющей секции статора силового магнитосоленоидного элемента подключены к общей автоматической системе объекта, производящей взаимопротивоположные изменения токов в этих соленоидах в зависимости от величины и знака вырабатываемого в системе унравляющего электрического сигнала, а соединенные носледовательно друг с другом обмотки фиксирующей секции статора силового магнитосоленоидного элемента подключены к аварийному источнику постоянного тока; причем последовательно с каждым из соленоидов управляющей секции включено по одной обмотке двухобмоточного электромагнитного реле, нормально замкнутая пара контактов которого включена в цепь соленоидов фиксирующей секции, последовательно с которыми включена также сигнальная лампа, щунтированная резистором.
Предложенная система обеспечивает как автоматическое, так и ручное управление положением золотника сервопривода, обладает более строгой термокомненсацией, устойчивостью против перегрузок и обеспечивает фиксадню положения сервопривода при ооесточивании основной системы.
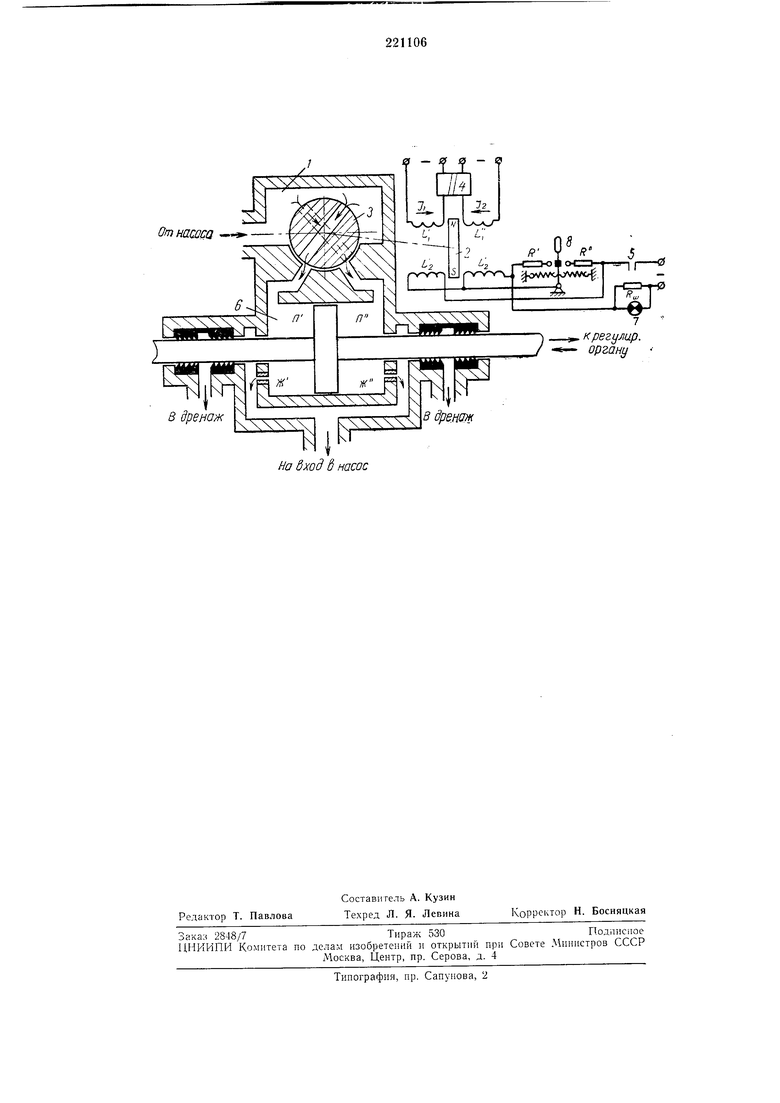
На чертеже представлена принципиальная схема системы управления гидравлическим сервоприводом.
Во входной (золотниковой) камере / размещен двухсекционный силовой магнитосоленоидный элемент, состоящий из пары соленоидов LI-LI, и постоянного магнита-ротора 2, и;меющего форму прямого бруска (для удобства изображения они вынесены из этой камеры).
Постоянный магнит-ротор 2 закреплен на оси золотника 3 так, что его центр тяжести находится на этой оси, а две из боковых граней перпендикулярны к ней. Вместе с золотником 3 и его осью постоянный магнит-ротор 2 образует поворотный якорь системы. Для снижения момента сил трения в опорах оси якоря до возможного минимума в них (онорах) используются ПОДП1ИПНИКИ качения.
Принадлел ащие статору силового магнитосоленоидного элемента соленоиды L/, L/, L-/, Lo относительно якоря закреплены неподвижно в корпусе сервопривода так, что их геометрические оси лежат в плоскости, проходящей через центр тяжести магнита 2 перпендикулярно оси якоря, на одинаковых (несколько 11еньших половины длины магнита) расстояииях от этой оси и перпендикулярны линии,
проходящей через центры торцовых (полюсных) граней магнита при его положении, соответствующем нейтральному( нулевому) положению золотника 3. При этом между обращенными к полюсам м-агнита 2 торцами соленоидов и соответствующими гранями этого магнита при нулевом положении якоря образуются равные друг другу зазоры, разрешающие последнему поворачиваться в обе стороны от нейтрального положения в потребных для его нормальной работы пределах.
Пара соленоидов L/-L/ вместе с постоянным магнитом-ротором 2 образует первую - управляющую секцию силового магнитосоленоидного элемента, используемую для преобразования сигнала, вырабатываемого электрической частью автоматического регулятора, п соответствующие этому сигналу перемещения управляющего золотника гидравлического сервопривода.
Вторую фиксирующую секцию этого элемента образует пара соленоидов , вместе с тем же самым постоянным магнитом-ротором 2. Эта секция используется для фиксации управляющего золотника сервопривода в нейтральном положении при обесточиванни первой секции и для отклонений его от этого положения при ручном управлении работой гидравлического сервопривода.
Соленоиды, принадлежащие одной паре, делаются идентичными как по всем конструктивным параметрам, так и по условиям теплообмена между их обмотками и окружающей средой. Это позволяет сделать плечи статора каждой секции силового магнитосоленоидного элемента симметричными и, тем самым, практически полностью устранить влияние изменений температуры окружающей среды на статическую точность реверсмеханизма.
Для устранения влияния на статическую точность системы линейных механических перегрузок делается симметричным и его поворотный якорь.
В описываемой системе используется двухобмоточное электромагнитное реле 4 с одной парой нормально замкнутых контактов, питание которого производится токами, протекающими в первой секции силового магнитосоленоидного элемента для сохранения симметрии плеч статора первой секции силового магнитосоленоидного элемента.
Работает описываемая система следующим образом.
При автоматическом управлении. Поступающие с выхода электрической части автоматического регулятора токи /i и 1- протекают соответственно через соленоиды LI и LI и включенные последовательно с ними обмотки реле 4, что обеспечивает удерживание контактов 5 этого реле в разомкнутом состоянии. Благодаря этому цепь включенных последовательно друг с другом и с лампой 6 соленоидов LZ и Lj оказывается обесточенной, и вторая фиксирующая секция силового магнитосоленоидного элемента в работе системы не
участвует. Это препятствует возникновению помех с ее стороны работе первой секции.
Направления токов в соленоидах L/ и задаются такими, чтобы магнитные поля каждого из них, взаимодействуя с полем постояииого магнита 2, производили отталкивание от соответствующих торцов этих соленоидов того полюса (на чертеже полюса N) постоянного магнита, который находится около каждого из
этих торцов. Вследствие этого магнит 2 всегда занимает такое положение, при котором поворачивающие его моменты, создаваемые названными силами отталкивания, уравновещивают друг друга.
При идентичности соленоидов L/ и L/ для случая равенства токов /i и/а (равенства нулю разности этих токов) равновесное положение магнита 2 будет таким, при котором расстояния от полюса до соответствующих торцов
каждого из соленоидов L/ и L/ будут равны одно другому. Систему выполняют такой, чтобы при этом связанный с магнитом 2 осью якоря системы управляющий золотник 3 сервопривода занимал нейтральное (нулевое) положение, обеспечивающее равенство друг другу гидравлических сопротивлений на входе в полости П и П рабочего цилиндра 6 гидравлического сервопривода. При равенстве определяемых л иклерами Ж и Ж гидравлических сопротивлений на выходе из полостей П и П это обеспечит, как известно, равенство давлений рабочей жидкости в этих полостях, обусловливающее уравновешенность действующих на поршень сервопривода сил и таким образом неподвижность этого поршня и связанного с ним штока.
Можно достаточно просто осуществить изменение под воздействием управляющего электрического сигнала каждого нз токов /j и /2
на одну и ту же величину Д/ в противоположных направлениях так, чтобы между ними возникла разность, равная 2 Л/.
Для этого, в частности, соленоиды L/ и LI могут быть включены в качестве нагрузок в
разные плечи двухтактного магнитного усилителя дифференциальной или мостовой схемы с выходом на постоянном токе, на вход которого воздействует управляющий сигнал. В этом случае, как известно, при отсутствии управляющего сигнала на входе усилителя токи в одинаковых нагрузках его плеч (в соленоидах L/ и LI) будут равны друг другу (что, как было сказано выше, обеспечит нулевое положение золотника 3 и неподвижность порщня сервопрнвода), а при появлении такого сигнала будут изменяться в противоположных направлениях на одну и ту же величину А /, абсолютное значение и знак которой и, следовательно, абсолютное значение и знак разности 2Д/
между токами в нагрузках плеч усилителя определяется абсолютным значением и знаком управляющего сигнала.
сии с их изменениями будут изменяться напряженности магнитных полей соленоидов L/ п La и, следовательно, величины отталкивающих сил, действующих с их стороны на магнит 2. Вследствие этого равновесное положение магнита 2 будет изменяться таким образом, что его полюс, на который действуют отталкивающие силы будет смещаться к торцу того из соленоидов, ток в котором уменьщается. Соответствующий этому смещению поворот золотника 3 от его нулевого положения вызовет нарушение равенства меладу гидравлическими сопротивлениями на входе в полости П и П цилиндра сервопривода, что при неизменности гидравлических сопротивлений на выходе из этих полостей приведет к возникновению неравенства давлений рабочей жидкости в них, обусловливающего появление разпостной силы давления на порщень сервопривода, вызывающей соответственно направленное его перемещение до тех пор, пока золотник 3 не будет установлен в нулевое полол-сение или порщень не достигнет своего конструктивно определяемого крайнего полол ения.
Таким образом, через посредство описываемой системы осуществляется однозначная связь между вырабатываемым в канале автоматического управления электрическим сигналом и перемещениями (точнее, величиной н нанравлением скорости перемещения) норщня гидравлического сервопривода.
Как следует из изложенного, преобразование управляющего электрического сигнала в соответствующие ему механические перемещения золотника гидравлического сервопривода в описываемой системе осуществляется при возникновении разности токов, протекающих через соленоиды L/ и L/, что указывает на дифференциальность схемы этой системы. Вследствие этого оказывается достаточным обеспечить лищь симметрию плеч, чтобы полностью устранить влияние на его статическую точность таких факторов, как изменение температуры окружающей среды и действие линейных механических перегрузок.
В самом деле, если плечи статора будут симметричными, что обеспечивается идентичностью соленоидов L/ и L/, а также включенных последовательно с ним обмоток реле 4 как цо их конструктивным параметрам, так и по условиям теплообмена между ними и окружающей средой, то при изменении температуры последней и равенстве токов в плечах и, следовательно, приложенных к ним напрял ений, что будет иметь место при равенстве нулю управляющего сигнала, в равной мере будут изменяться температура и, следовательно, активное и полное сопротивление как одного, так и другого плеча, что в свою очередь обусловит равенство изменений токов в них. Очевидно, что при этом разность токов в соленоидах LI и LI будет оставаться равной нулю, а якорь системы будет сохранять нулевое полол ение.
метрии плеч статора описываемой системы нулевому управляющему сигналу нрн всех изменениях температуры окружающей среды будет соответствовать нулевое положение якоря этой
системы, что и определяет возможность обеспечения независимости ее статической точности от температуры внещней среды.
Независимость статической точности сисгсмы от действующих на нее линейных механических перегрузок достигается за счет осесимметричности ее якоря, при которой разнос масс составляющих этот якорь деталей (магнита 2, золотника 3 и валика-оси, их соединяющего) относительно оси его вращения оказывается равномерным и обеспечивает его статическую уравновещенность. В результате этого поворачивающие якорь моменты инерционных сил, действующих при линейных механических перегрузках на его плечи, расположенные по разные стороны от оси, оказываются всегда взаимно скомпенсированными и не могут отклонить якорь от положения, соответствующего действующему в данный момент (в том числе и нулевому) управляющему сигналу.
Разумеется, при таком устройстве якорь описываемой системы оказывается чувствительным к инерционным моментам, возникающим при действии на него угловых ускорении, векторы которых имеют составляющие, иараллельные оси якоря. Однако практически такого рода ускорения из-за их малой величины и непродоллчнтельности действия не снособны явиться причиной сколько-нибудь существенных отклонений от нормы Е работе системы.
Таковые особенности онисываемой системы, обусловливающие возмол ность получения практически полной независимости его статической точности от таких факторов, как изменение температуры окрул ающей среды и действие на него механических перегрузок.
Существует еще одна причина, способная влиять на статическую точность рассматриваемой системы. Состоит она в том, что на его намагниченный якорь могут действовать виещние магнитные поля, в том числе и магнитное 1юле Земли. Однако эта причина легко устраняется сведением практически к нулю напряженности внещних магнитных полей в зоне располол ения силового магнитосоленоидного
элемента путем окрул ения этой зоны замкнутым экраном из материала с высокой магнитной проницаемостью.
При а в т о ф и к с а ц и и и р у ч н о м у правлении. Описываемая система осуществляет автоматическую фиксацию порщня гидравлического сервопривода при обссточиванин обмоток реле 4, включенных последовательно с соленоидами L/ и L/, что быть как следствием выхода из строя электрической части регулятора или источника ее питания, так и специально предусмотрено программой работы системы автоматического управления.
При обесточивании обтомок реле 4 происходит отпускание его якоря, что вызывает замыВ результате этого цепь соединенных послел,овательно друг с другом и с сигнальной лампой 7 соленоидов и оказывается замкнутой и через нее от аварийного источника ннтания, к которому она подключена, начинает протекать ток. Соленоиды L-2 и Lo соединены друг с другом и подключаются к аварийному источнику постоянного тока так, чтобы магнитные поля этих соленоидов, создаваемые протекающим через них током, производили отталкивание соответствующего полюса магнита 2 (полюса 5) и в результате этого обеспечивали установку и удерживание якоря системы в равновесном положении, при котором поворачивающие якорь вокруг его оси в противоположных направлениях моменты действующих на него отталкивающих сил становятся одинаковыми по величине и взаимно уравновешиваются. Закрепление соленоидов L и в корпусе сервопривода производят так, чтобы обеспечиваемое ими равновесное положение якоря системы соответствовало нулевому положению управляющего золотника 3, при котором, как уже указывалось, разностная сила давлений рабочей жидкости на поршень сервопривода оказывается равной нулю, что и обеспечивает прекращение его перемещения (его фиксацию в положении, близком к тому, которое он занимал в момент обесточивания солеиоидов
L/nL/).
Для сигнализации о срабатывании реле 4 в сторону переключения системы на фиксацию управляющего золотника 3 в нулевом положении в цепь соленоидов L-i и L-2 включена лампа 7, шунтированная резистором . Последний служит для исключения разрыва цепи названных соленоидов в случае перегорания этой лампы.
После ее загорания перестаповка поршня сервопривода и связанного с ним регулирующего органа системы в любое требуемое положение (ручное электрическое управление) производится путем шунтирования одного из соленоидов L-2 или Lo соответственно резистором R или , осуществляемого замыканием центрального контакта нал имного трехпозиционного тумблера 8 с одним из его боковых контактов. При этом ток в незашунтированном соленоиде увеличивается, а в зашунтировапном уменьшается. Первое происходит из-за уменьшения общего сопротивления цепи соленоидов L и Lg при шунтировании одного из них, а второе - вследствие того, что через зашунтированный соленоид течет только часть всего тока, другая часть которого иаправляется через шунтирующий резистор. Согласно вызываемым таким образом изменения токов в соленоидах L/ и La изменяются напряженности магнитных полей последних, что ведет к смещению равновесного положения полюса магнита 2, на который они действуют, в сторону соленоида с меньшим током. В результате происходящего при этом поворота якоря системы золотник 3 отклоняется от его нулевого положения, обусловливая возникновение разностной силы давлений рабочей жидкости на поршень сервопривода, производящей его перемещение. Прекращение шунтирования соленоидов (установка центрального контакта тумблера 8 в исходную нейтральную позицию) новедет к возвращению якоря системы в нулевое положение и к прекращению перемещения поршня сервопривода. Направление и величиiia этого перемещения определяется, очевидно, тем, какой из соленоидов (L- или и как
долго будет шунтироваться.
Предмет изобретения
. Система управления гидравлическим сервоприводом с проточными полостями рабочего
цилиндра, управляемого поворотным золотником, с закрепленным на его оси и расположенным во входной камере сервопривода двухсекционным силовым магнитосоленоидным элементом, имеющим общий для обеих
секций постоянный магнит-ротор, расположенные вне сервопривода двухобмоточное электромагнитное реле, трехпозиционный нажимной тумблер с подключенными к его боковым контактам резисторами, отличающаяся тем,
что, с целью обеспечения как автоматического, так и ручного управления положением золотника сервопривода, а также автоматической фиксации этого золотника в его нейтральном положении при обесточивании канала автоматического управления, обмотки управляющей секции статора силового магнитосоленоидного элемента подключены к общей автоматической системе объекта, нроизводящей взаимопротивоположные изменения токов в этих соленоидах в зависимости от величины и знака вырабатываемого в системе управляющего электрического сигнала, а соединенные последовательно друг с другом обмотки фиксирующей секции статора силового
магнитосоленоидного элемента подключены к аварийному источнику постоянного тока.
2. Система по п. 1, отличающаяся тем, что, с целью обеспечения поочередной, исключающей взаимные помехи работы управляющей и
фиксирующей секций силового магнитосоленоидного элемента, а также обеспечения сигнализации об обесточивании соленоидов управляющей секции и необходимости в связи с этим перехода к ручному управлению, носледовательно с каждым из соленоидов управляющей секции включено по одной обмотке двухобмоточного электромагнитного реле, нормально замкнутая пара контактов которого включена в цепь соленоидов фиксирующей секции,
последовательно с которыми включена также сигнальная лампа, шунтированная резистором. От насоса в дренаж
На Вход д насос крегулир. органу


| название | год | авторы | номер документа |
|---|---|---|---|
| РАСПРЕДЕЛИТЕЛЬНОЕ КЛАПАННОЕ УСТРОЙСТВО | 1989 |
|
RU2074990C1 |
| РЕАКТИВНАЯ МАШИНА | 2010 |
|
RU2412519C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ЭЛЕКТРОПРИВОДА ВЕРТИКАЛЬНОГО ПЕРЕМЕЩЕНИЯ РЕГУЛИРУЮЩЕГО ОРГАНА | 2018 |
|
RU2693935C1 |
| Электропривод возвратно-поступательного движения | 1987 |
|
SU1451815A1 |
| Механическая трансмиссия с системой автоматического управления распределением крутящих моментов между колесами автотранспортного средства (4к4) с отключаемым приводом одного из ведущих мостов | 2019 |
|
RU2706681C1 |
| Кулачковый контроллер | 1980 |
|
SU943688A1 |
| Механическая трансмиссия АТС (4х4) с межколесным регулируемым дифференциальным механизмом и системой автоматического управления режимами работы дифференциалов при непрямолинейном движении | 2020 |
|
RU2749974C1 |
| Регулируемый межколесный дифференциальный механизм (МКДМ) для легковых автомобилей (4к2) | 2023 |
|
RU2819467C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2001 |
|
RU2220431C2 |
| ПРОПОРЦИОНАЛЬНЫЙ ГИДРАВЛИЧЕСКИЙ РАСПРЕДЕЛИТЕЛЬ ПРЯМОГО ДЕЙСТВИЯ С КООРДИНАТНЫМ УПРАВЛЕНИЕМ | 2024 |
|
RU2828817C1 |