1
w
Ё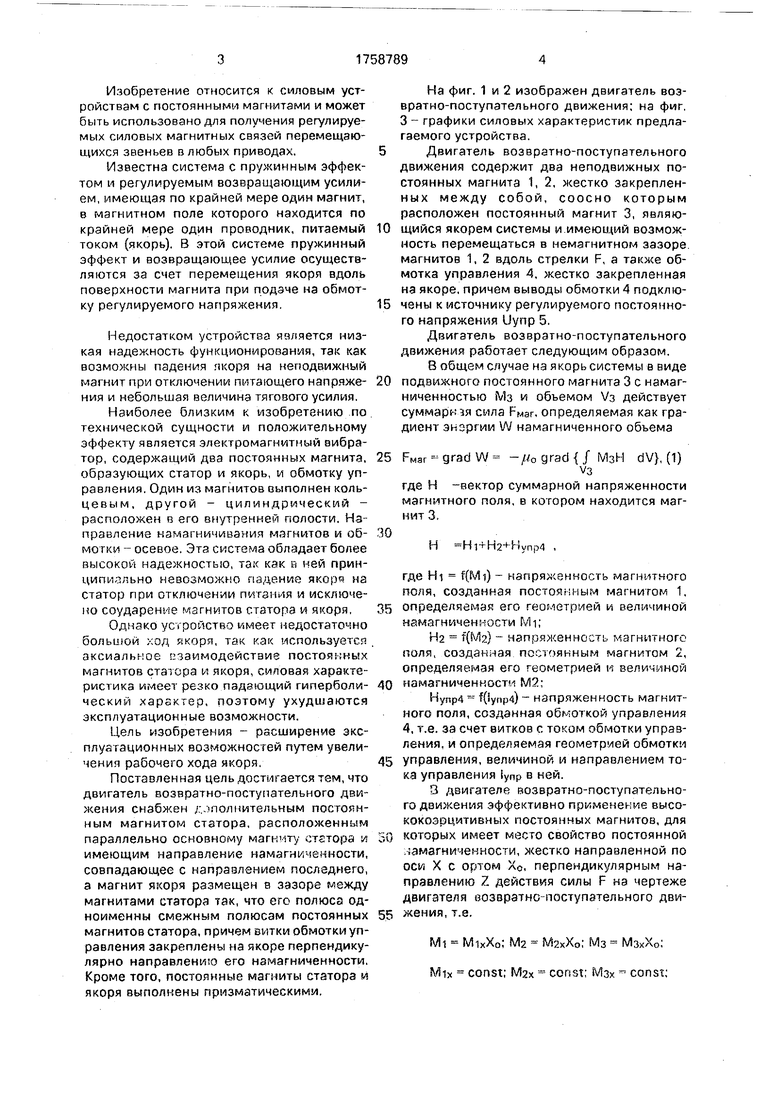
| название | год | авторы | номер документа |
|---|---|---|---|
| ОБРАТИМАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 2011 |
|
RU2494521C2 |
| ЭЛЕКТРОДВИГАТЕЛЬ С ВОЗВРАТНО-ПОСТУПАТЕЛЬНЫМ ДВИЖЕНИЕМ ЯКОРЯ | 2015 |
|
RU2586116C1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1992 |
|
RU2025872C1 |
| ВОЗБУДИТЕЛЬ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ | 2008 |
|
RU2440660C2 |
| ГЕНЕРАТОР ПЕРЕМЕННОГО ТОКА | 1999 |
|
RU2173499C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД | 1996 |
|
RU2098909C1 |
| РЕЕЧНЫЙ МЕХАНИЗМ | 2019 |
|
RU2724376C1 |
| Устройство для экспериментальных исследований гидравлических движителей | 1988 |
|
SU1615589A1 |
| СПОСОБ ПОЛУЧЕНИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ В ИНДУКТОРНОМ ГЕНЕРАТОРЕ С ГИБКИМ СТАТОРОМ | 2013 |
|
RU2546146C1 |
| УСТРОЙСТВО ПРИВОДА КЛАПАНА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2015 |
|
RU2578929C1 |
Использование: в электротехнике для получения регулируемых силовых магнитных связей перемещающихся звеньев в любых приводах. Сущность изобретения: два неподвижных постоянных магнита 1,2 статора, в зазоре между которыми расположен постоянный магнит 3 якоря, перемещающийся вдоль зазора и снабженный обмоткой 4 управления. Направления намагничивания магнитов 1, 2 статора и обмотки 4 совпадают и противоположны направлению намагничивания магнита 3 якоря. Такое выполнение позволяет расширить эксплуатационные возможности путем увеличения рабочего хода якоря. 1 з.п. ф-лы, 3 ил.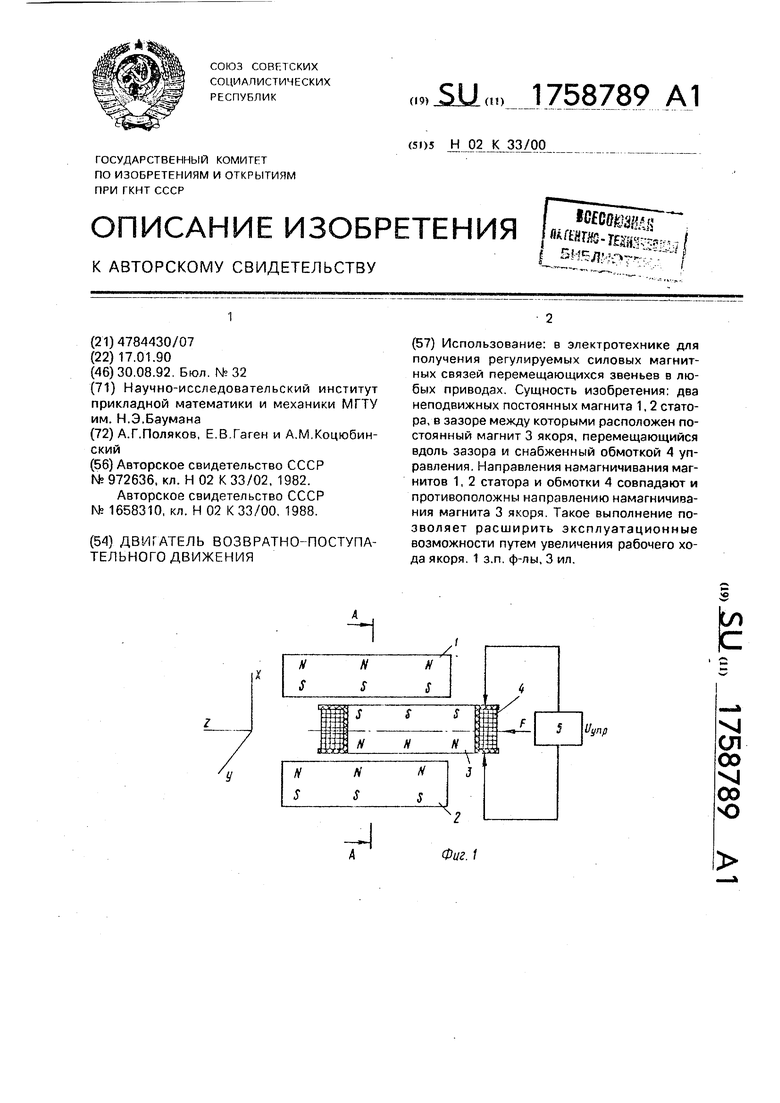
Uynp
VJ
сл
00 XJ 00 О
Изобретение относится к силовым устройствам с постоянными магнитами и может быть использовано для получения регулируемых силовых магнитных связей перемещающихся звеньев в любых приводах.
Известна система с пружинным эффектом и регулируемым возвращающим усилием, имеющая по крайней мере один магнит, в магнитном поле которого находится по крайней мере один проводник, питаемый током (якорь). В этой системе пружинный эффект и возвращающее усилие осуществляются за счет перемещения якоря вдоль поверхности магнита при подзче на обмотку регулируемого напряжения.
Недостатком устройства является низкая надежность функционирования, так как возможны падения якоря на неподвижный магнит при отключении питающего напряжения и небольшая величина тягового усилия.
Наиболее близким к изобретению по технической сущности и положительному эффекту является электромагнитный вибратор, содержащий два постоянных магнита, образующих статор и якорь, и обмотку управления. Один из магнитов выполнен коль- цевым, другой - цилиндрический - расположен в его внутренней полости. Направление намагничивания магнитов и об- могки - осевое. Эта система обладает более высокой надежностью, так как в ней принципиально невозможно падение якоря на статор при отключении питания и исключено соударение магнитов статора и якоря,
Однако устройство имеет недостаточно большой ход якоря, так как используется аксиальное взаимодействие постоянных магнитов статора и якоря, сиповая характеристика имеет резко падающий гиперболический характер, поэтому ухудшаются эксплуатационные возможности.
Цель изобретения - расширение эксплуатационных возможностей путем увеличения рабочего хода якоря.
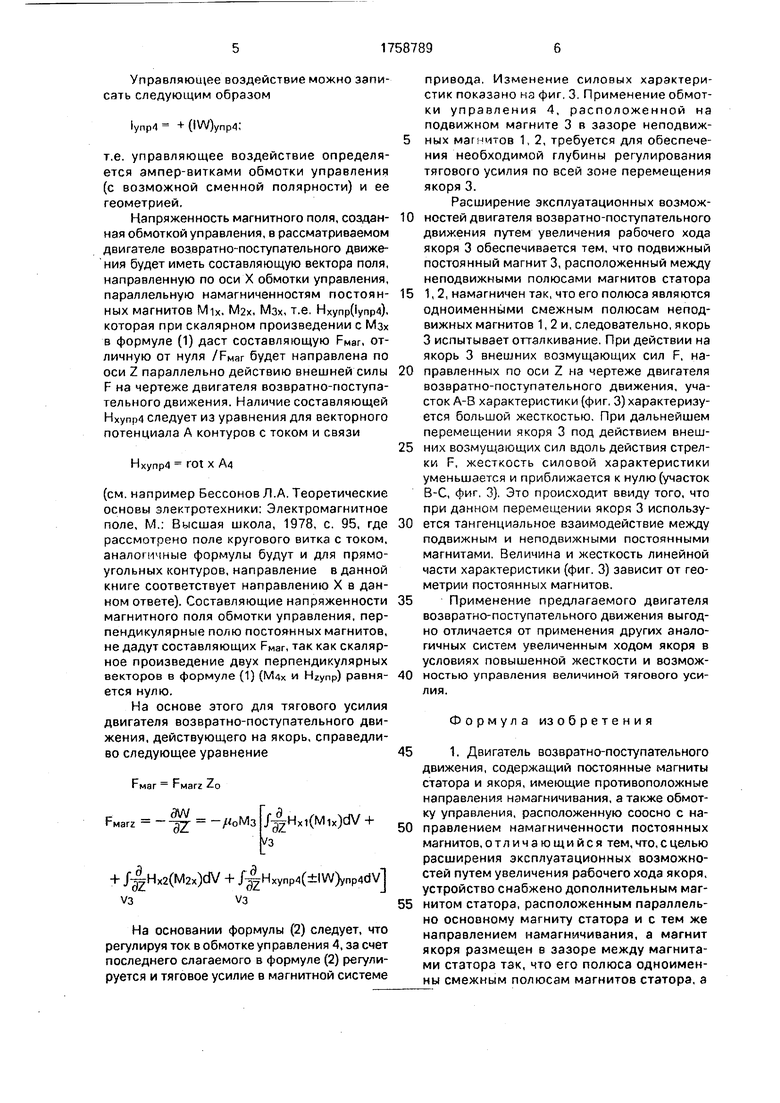
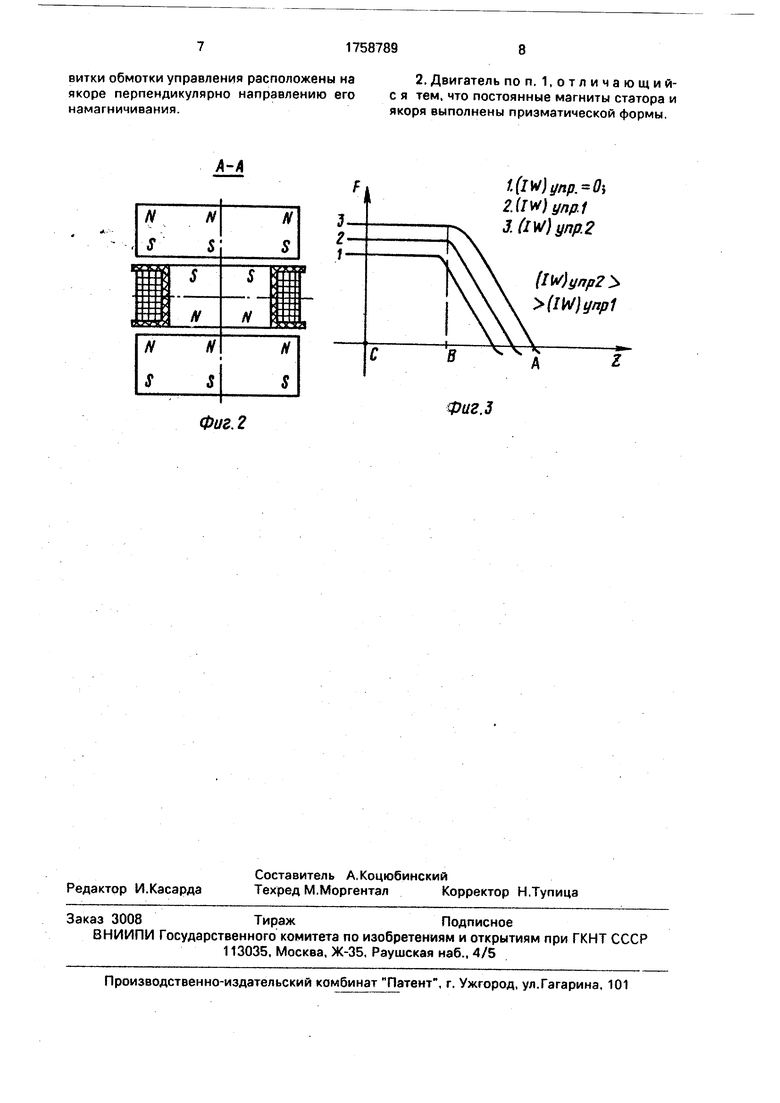
Поставленная цель достигается тем, что двигатель возвратно-поступательного движения снабжен ;-..члолнительным постоянным магнитом статора, расположенным параллельно основному магниту статора и имеющим направление намагниченности, совпадающее с направлением последнего, а магнит якоря размещен в зазоре между магнитами статора так, что его полюса од- ноименны смежным полюсам постоянных магнитов статора, причем БИТКИ обмотки управления закреплены на якоре перпендикулярно направлению его намагниченности. Кроме того, постоянные магниты статора и якоря выполнены призматическими.
На фиг. 1 и 2 изображен двигатель возвратно-поступательного движения; на фиг, 3 - графики силовых характеристик предлагаемого устройства.
Двигатель возвратно-поступательного
движения содержит два неподвижных постоянных магнита 1, 2, жестко закрепленных между собой, соосно которым расположен постоянный магнит 3, являющийся якорем системы и имеющий возможность перемещаться в немагнитном зазоре магнитов 1, 2 вдоль стрелки F, а также обмотка управления 4, жестко закрепленная на якоре, причем выводы обмотки 4 подключены к источнику регулируемого постоянного напряжения Uynp 5.
Двигатель возвратно-поступательного движения работает следующим образом. 8 общем случае на якорь системы в виде
подвижного постоянного магнита 3 с намагниченностью Мз и объемом Уз действует суммарная сила РМэг, определяемая как градиент эизргии W намагниченного объема
Рмаг - grad W -//о grad{/ МзН dV}, (1)
V3
где Н -вектор суммарной напряженности магнитного поля, в котором находится магнит 3,
Н Hl + H2+Hynp4 ,
где Hi f{Mi) - напряженность магнитного поля, созданная постоянным магнитом 1,
определяемая его геометрией и величиной намагниченности MI;
На т(Мг) - напряженность магнитного поля, созданная постоянным магнитом 2, определяемая его геометрией м величиной
намагниченности М2;
Нупр4 f(iynp4) - напряженность магнитного поля, созданная обмоткой управления 4, т.е. за счет витков с током обмотки управления, и определяемая геометрией обмотки
управления, величиной и направлением тока управления iynp в ней.
3 двигателе возвратно-поступательного движения эффективно применение высо- кокозрцитивных постоянных магнитов, для
которых имеет место свойство постоянной намагниченности, жестко направленной по осм X с ортом Х0, перпендикулярным направлению Z действия силы F на чертеже двигателя возвратно-поступательного движения, т.е.
Mi MuXo; M2 М2хХ0; М3 МзхХ0; Mix const; M2x - const; Мзх const;
Управляющее воздействие можно записать следующим образом
+ (IW)ynp4;
т.е. управляющее воздействие определяется ампер-витками обмотки управления (с возможной сменной полярности) и ее геометрией.
Напряженность магнитного поля, созданная обмоткой управления, в рассматриваемом двигателе возвратно-поступательного движе- ния будет иметь составляющую вектора поля, направленную по оси X обмотки управления, параллельную намагниченностям постоянных магнитов Mix, M2x, Мзх, т.е. НхупрОупрз), которая при скалярном произведении с Мзх в формуле (1) даст составляющую Рмаг, отличную от нуля /Рмаг будет направлена по оси Z параллельно действию внешней силы F на чертеже двигателя возвратно-поступательного движения. Наличие составляющей НХупр4 следует из уравнения для векторного потенциала А контуров с током и связи
НХупр4 rot X А4
(см. например Бессонов Л.А. Теоретические основы электротехники: Электромагнитное поле, М.: Высшая школа, 1978, с. 95, где рассмотрено поле кругового витка с током, аналогичные формулы будут и для прямоугольных контуров, направление в данной книге соответствует направлению X в данном ответе). Составляющие напряженности магнитного поля обмотки управления, перпендикулярные полю постоянных магнитов, не дадут составляющих FMar, так как скалярное произведение двух перпендикулярных векторов в формуле (1) (М4х и Hzynp) равняется нулю.
На основе этого для тягового усилия двигателя возвратно-поступательного движения, действующего на якорь, справедливо следующее уравнение
V3
V3
На основании формулы (2) следует, что регулируя ток в обмотке управления 4, за счет последнего слагаемого в формуле (2) регулируется и тяговое усилие в магнитной системе
привода. Изменение силовых характеристик показано на фиг, 3. Применение обмотки управления 4, расположенной на подвижном магните 3 в зазоре неподвиж- 5 ных магнитов 1, 2, требуется для обеспечения необходимой глубины регулирования тягового усилия по всей зоне перемещения якоря 3.
Расширение эксплуатационных возмож0 ностей двигателя возвратно-поступательного движения путем увеличения рабочего хода якоря 3 обеспечивается тем, что подвижный постоянный магнит 3, расположенный между неподвижными полюсами магнитов статора
5 1,2, намагничен так, что его полюса являются одноименными смежным полюсам неподвижных магнитов 1, 2 и, следовательно, якорь 3 испытывает отталкивание. При действии на якорь 3 внешних возмущающих сил F, на0 правленных по оси Z на чертеже двигателя возвратно-поступательного движения, участок А-В характеристики (фиг, 3) характеризуется большой жесткостью. При дальнейшем перемещении якоря 3 под действием внеш5 них возмущающих сил вдоль действия стрелки. F, жесткость силовой характеристики уменьшается и приближается к нулю (участок В-С, фиг, 3). Это происходит ввиду того, что при данном перемещении якоря 3 использу0 ется тангенциальное взаимодействие между подвижным и неподвижными постоянными магнитами. Величина и жесткость линейной части характеристики (фиг. 3) зависит от геометрии постоянных магнитов.
5 Применение предлагаемого двигателя возвратно-поступательного движения выгодно отличается от применения других аналогичных систем увеличенным ходом якоря в условиях повышенной жесткости и возмож0 ностью управления величиной тягового усилия.
Формула из обретения
движения, содержащий постоянные магниты статора и якоря, имеющие противоположные направления намагничивания, а также обмотку управления, расположенную соосно с на0 правлением намагниченности постоянных магнитов, отличающийся тем, что, с целью расширения эксплуатационных возможностей путем увеличения рабочего хода якоря, устройство снабжено дополнительным маг5 нитом статора, расположенным параллельно основному магниту статора и с тем же направлением намагничивания, а магнит якоря размещен в зазоре между магнитами статора так, что его полюса одноимен- ны смежным полюсам магнитов статора, а
витки обмотки управления расположены на якоре перпендикулярно направлению его намагничивания.
А-А
J.
г1Фиг. 2
{lW}ynp2 (W}ynp1
Фиг.З
| Магнитная система привода | 1978 |
|
SU972636A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электромагнитный вибратор | 1988 |
|
SU1658310A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
