(54) ЗУБЧАТа-РЫЧАЖНЫЙ ВАРИАТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Рычажный вариатор | 1982 |
|
SU1040251A1 |
| РЫЧАЖНЫЙ ВАРИАТОР | 2011 |
|
RU2467227C1 |
| ВЫСОКОМОМЕНТНЫЙ ВАРИАТОР | 2000 |
|
RU2179673C1 |
| ЗУБЧАТО-РЫЧАЖНЫЙ ВАРИАТОР | 1998 |
|
RU2147701C1 |
| ЗУБЧАТО-РЫЧАЖНЫЙ ВАРИАТОР | 1998 |
|
RU2137966C1 |
| Система управления поворотом гусеничной машины | 1991 |
|
SU1813669A1 |
| Зубчато-рычажный кулисный механизм с выстоем ведомого звена | 1979 |
|
SU903628A1 |
| Замкнутая передача | 1990 |
|
SU1763771A1 |
| БЕССТУПЕНЧАТАЯ ТРАНСМИССИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2340473C2 |
| ВЫСОКОМОМЕНТНЫЙ ВАРИАТОР НЕФРИКЦИОННОГО ТИПА | 2016 |
|
RU2622178C1 |

I
Изобретение относится к машиностро енкю и может быть использовано в качестве коробки скоростей металлорежущих станков.
Известны планетарные вариаторы скоростей с зубчатым зацеплением, выполненным в виде набора пластин l. j
Подобные вариаторы обладают нввысс кими значениями КПД.
Наиболее близким по технической сущности к предлагаемому является зубчаторычажный вариатор, содержащий- вхоДнбЙ R выходной валы, дифференциальную Передачу, конический дифференциал, полуосевые шестерни которого кинематически связаны с элементами дифференциальньй передачи, образуя замкнутый силовой контур, и механизм изменения передаточного отношения 2}.
Известная передача имеет сравнительно невысокий диапазон изменения передаточного отношенвя, поскольку ее кинематическая связь не допускает Полной остановки ведомого вала при вращении ведущего. .
Цель изобретена расширение диапазона изменения передаточного отнощения.
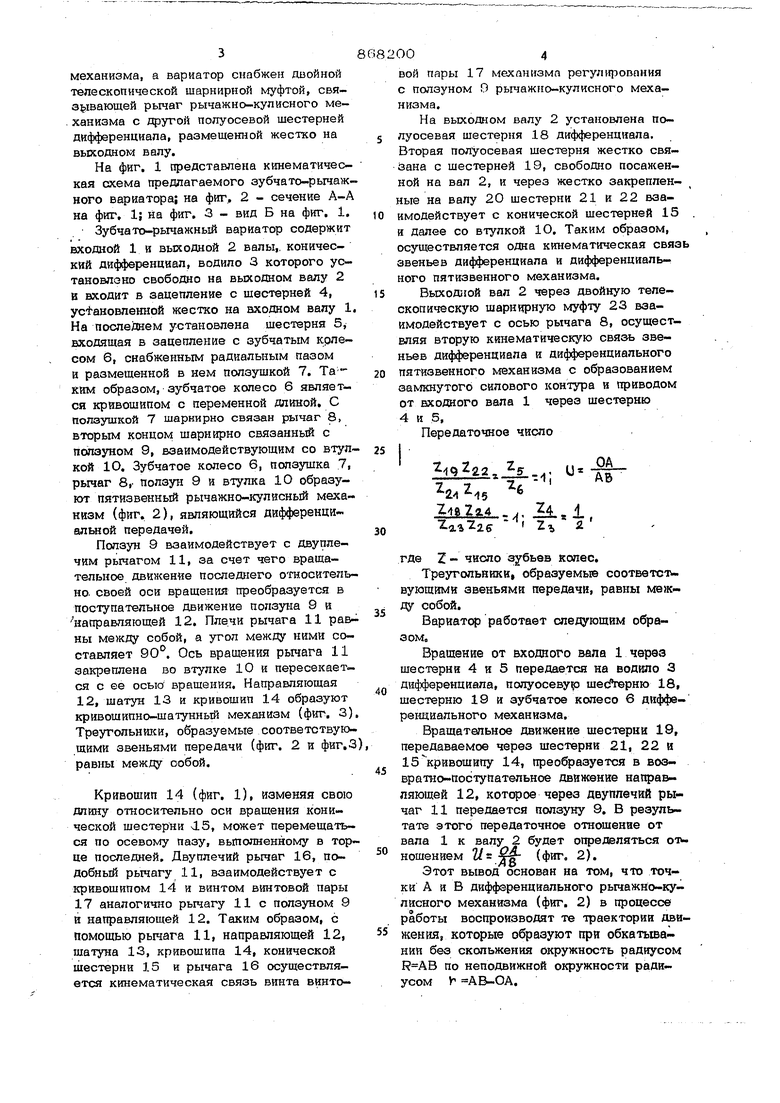
Поставленная цель достигается тем, что дифференциальная передача выполнена в виде пятизвенного рычажно-кулионого механизма, ползун которого кинематически связан с одной из полуосевых щестерен дифференциала, а кривошип представляет собой кинематически связа1шое со входаым валом зубчатое колесо с радиальным пазом и размещенной в нем ползущкой, щарнирно связанной с рычагом рычажно-кулисного механизма, водило дифференциала установлено свободно на выходном и кинематически связано с входным валом с передаточным отнощением, вдвое большим передаточного отношения кинематической связи кривошип-входной вал, механизм регулирования выполнен в виде винтовой пары, ВИНТ которой кинематически связан с пбпзуном пятизвенного рычажно-куписного 3 механизма, а вариатор снабжен двойной телескопической шарнирной муфтой, свяа|.юающей рычаг рычажно-куписного ме. ханизма с яругой полуосевой шестерней дифференциала, размещенной жестко на выходном валу. На фиг. 1 представлена кинематическая схема предлагаемого зубчато-рычаж него вариатора; на фиг, 2 - сечение А-А на фиг, 1; на фиг, 3 - вид Б на фиг. 1. Зубчато-рычажный вариатор содержит входной 1 и выходной 2 валы,, конический дифференциал, водило 3 которого установлзно свободно на выходном валу 2 и входит в зацепление с шестерней 4, усФановлениой жестко на входном валу 1 На последнем установлена шестерня 5у входящая в зацепление с зубчатым крлесом 6, снабженным радиальным пазом и размещенной в нем ползушкой 7, образом, зубчатое колесо 6 является кривошипом с переменной длиной, С попзушкой 7 шаркирно связан рычаг 8, вторым концом шарнирно связанный с ползуном 9, взаимодействующим со втул кой 10, Зубчатое колесо 6, ползушка 7, рычаг 8,. ползун 9 и втулка 10 образуют пятиавенный рычажно-кулисный меха ниэм (фиг, 2), являющийся дифференциальной передачей. Ползун 9 взаимодействует с двуплечим рычагом 11, за счет чего вращательное движение последнего относительно, своей оси вращения преобразуется в поступательное движение ползуна 9 к направляющей 12, Плечи рычага 11 рав ны между собой, а угол между ними составляет 90. Ось вращения рычага 11 закреплена во втулке 10 и пересекается с ее осью вращения. Направляющая 12, шатун 13 и кривошип 14 образуют кривошипно-шатунный механизм (фиг. 3) Треугольншси, образуемые соответствующими звеньями передачи (фиг. 2 и фиг.З равны между собой. Кривошип 14 (фиг. 1), изменяя свою длину относительно оси вращения конической шестерни J.5, может перемещаться по осевому пазу, выполненному в торце последней. Двуплечий рычаг 16, подобный рычагу 11, взаимодействует с 1ФИВОЩИПОМ 14 и винтом винтовой пары 17 аналогично рычагу 11с ползуном 9 и направляющей 12. Таким образом, с помощью рычага 11, направляющей 12, шатуна 13, кривошипа 14, конической шестерни 15 и рычага 16 осуществляется кинематическая связь винта винто004вой пары 17 механизма peгyл qэoвnния с ползуном О рычажно-кулисного механизма. На выходном валу 2 установлена полуосевая шестерня 18 дифференциала. Вторая полуосевая шестерня жестко связана с шестерней 19, свободно посаженной на вал 2, к через жестко закрепленные на валу 20 шестерни 21 и 22 взаимодействует с конической шестерней 15 , и далее со втулкой 1О. Таким образом, осуществляется одна кинематическая связь звеньев дифференциала и дифференциального пятизвенного механизма. ВыхоД юй вал 2 через двойную телескопическую шарнщэную муфту 23 взаимодействует с осью рычага 8, осуществляя вторую Кинематическую связь звеньев дифференциала и дифференциального пятизвенного механизма с образованием замкнутого силового контура и приводом от входного вала 1 через шестерню 4 и 5, Передаточное число , 5 ... и : -т ( 2Л 15 llllM-.w, ll,i, 2, 2 где Z - число зубьев колес, Треугольники, образуемые соответст вующими звеньями передачи, равны между собой. Вариатор работает следующим образом. Вращение от входного вала 1 через шестерни 4 и 5 передается на водило 3 дифференциала, полуосеву шес герню 18, шестерню 19 и зубчатое колесо 6 дифференциального механизма. Вращательное движение щеотерни 19, передаваемое через щестерни 21, 22 и 15 крнвощипу 14, преобразуется в возвратно-поступательное движение направляющей 12, которое через двуппечнй рычаг 11 передается ползуну 9, В результате этого передаточное отношение от вала 1 к валу 2 будет определяться отношением и-,4- (фиг, 2), Этот вывод основан на том, что точки А и В дифференциального рычажно-кулисного механизма (фиг. 2) в процессе работы воспроизводят те траектории движения, которые образуют при обкатьшании без скольжения окружность радиусом по неподвижной окружности радиусом У АВ-ОА, Изменяя величину ОА с помощью винтовой пары 17 (тем -самым меняется радиус неподвижности окружности), будем менять и величину передаточного от ноиения. Зубчато-рычажный вариатор позволяет изменять бесступенчато величину передаточного отношения, обеспечивая изменение скорости выходного вала в широком диапазоне вплоть до ее нулевого значени Формула изобрет е н н я Зубчато-рычажный вариатор, содержащий входной и выходной валы, дифференциальную передачу, конический дифференциал, полуосевыв шестерни которого кинематически связаны с элементами Дифференциальной передачи, образуя замкнутый силовой контур, и механизм изменения передаточного отношения, отличающийся тем, что, с целью рас ширения диапазона изменения передаточного отношения, дифференциальная передача вьтолнена в виде пятизвенного рычажно-кулисного механизма, ползун которого кинематически связан с одной из полуосевых шестерен дифференциала, а кривошип представляет собой кинематиtiScKti связанное со входным валом зубчатое колесо с радиальным пазом и размещенной в нем ползушкой, шарнщэно связанной с рычагом рычажно-куписного механизма, водило ди(1)ференциапа установлено свободно на выходном валу и кинематически связано ,с входным валом с передаточным отношением, вдвое большим передаточного отношения кинематической связи кривошип - входной вал, механУ1зм регулирования вьтолнен в виде винтовой пары, винт которой кинематически связан с ползуном пятизвенного рычажно-кулисного механизма, а варпа V тф снабжен двойной телескопической шарнирной муфтой, связьюающей рычаг рычажно-кулисного механизма с другой полуосевой шестерйей дифференциала, размещенной жестко на выходном валу, Источники информации, . принятые во внимание при экспертизе 1. Кожевников С. Н, и др. Механизмы. М., Машиностроение, 1976, с. 360, рис. 5. 66. 2. Кожевников С. Н. и др. Механизмы. М., Машиностроение, 1965, с. 406, рис. 5. 67 (прототип).
У иг, 2
.иЦ .J2 ии /
(.З
