i
, ilfi/I;
lit
т
irmni
т vs
00 W
а
Os
о
Изобретение относиться к транспортному машиностроению, преимущественно к механизмам поворота гусеничных машин.
Целью изобретения является повышение безопасности движения-гусеничной машины путем обеспечения определенного радиуса поворота независимо от дорожных условий.
Эта цель достигается благодаря тому, что в предлагаемой системе одна из полуосевых шестерен дифференциала соединена через зубчатую передачу с ведущим колесом соответствующего борта машины, вторая шестерня соединена с ведущим колесом другого борта посредством второй зубчатой передачи и механизма с изменяемым передаточным числом, например фрик- ционного вариатора, а водило дифференциала соединено с гидроусилителем посредством маломоментного фрикциона, воздействующего на золотник, при этом рулевой привод соединен с фрикционным вариатором, а золотник сообщен с демпфером гидроусилителя,
В отличие от прототипа следящий привод заявляемого технического решения включает механическую и гидравлическую части. Причем наличие дифференциала и фрикционного вариатора, связанных с механизмом поворота машины гидравлически, обеспечивает бесступенчатое отслеживание оборотов ведущих колес, т.е. скоростей гусениц. Наличие в приводе маломоментного фрикциона, связанного с водилом дифференциала, обеспечивает передачу сигнала на золотник независимо от скорости вращения водила.
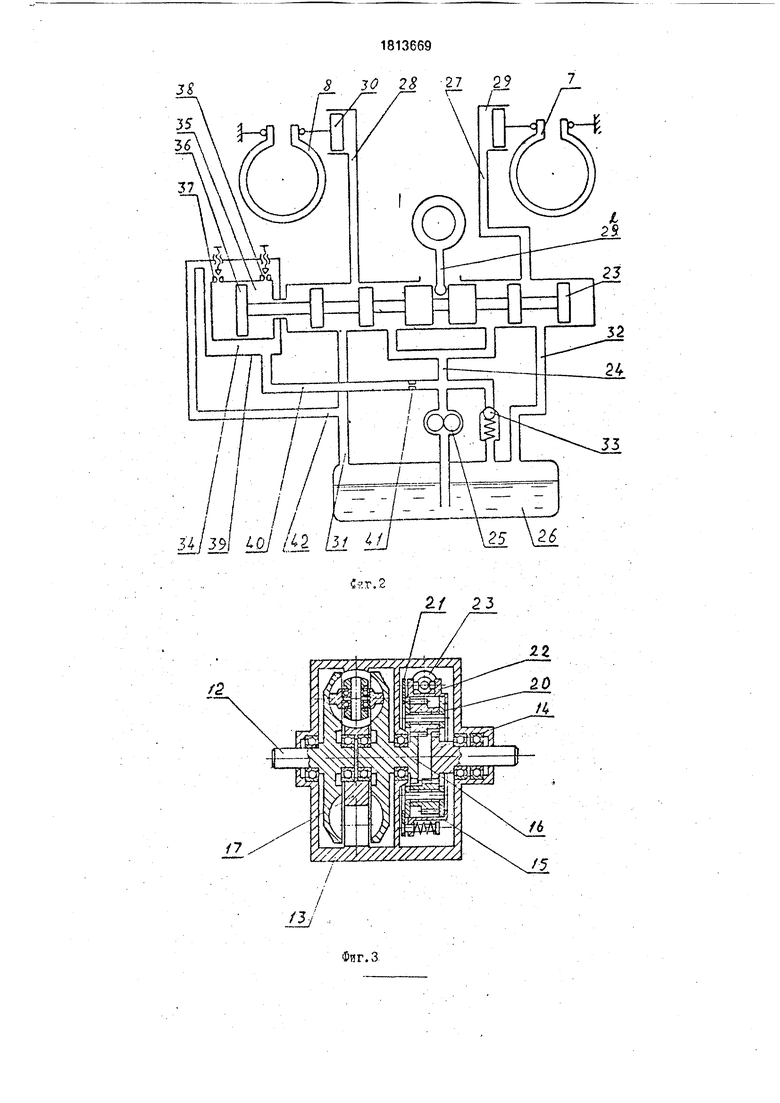
На фиг.1 изображена кинематическая схема системы, на фиг.2 - гидравлическая схема привода; на фиг.З - конструктивная схема компоновки дифференциала и фрикционного вариатора привода; на фиг.4 - ма обеспечения прямолинейного движения или поворота с постоянным (фиксированным) радиусом за счет малых поправок курса машины.
Предлагаемая система управления поворотом включает двигатель 1, механизм поворота 2, выполненный, например, в виде двойного дифференциала с выходными валами 3 и 4, соединенными с бортовыми ведущими колесами 5 и 6, тормоза 7 и 8. Ведущие колеса 5 и 6 посредством зубчатых редукторов 9 м 10 связаны с входными валами 11 и 12 следящего привода механизма поворота 13. На валу 11 закреплена полуосевая шестерня 14 дифференциала 15 следующего привода 13, вторая полуосевая шестерня 16 дифференциала 15 связана с валом 12 посредством фрикционного вариатора 17, соединенного с рулевым колесом 18 посредством тяги 19. На водиле 20 дифференциала 15 размещен маломоментный фрикцион 21 с рычагом 22.
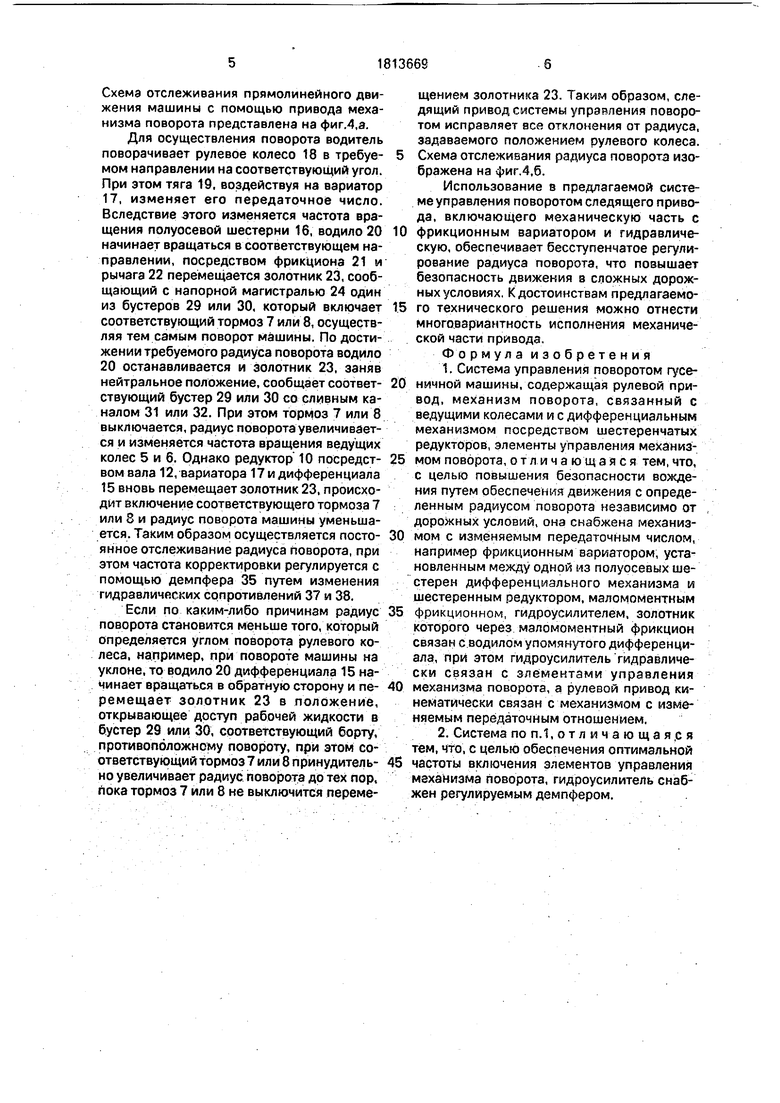
Гидравлическая часть системы управления поворотом включает управляющий золотник 23, сообщенный трубопроводом 24 с насосом 25, качающим рабочую жидкость из бака 26. Золотник 23 трубопроводами 27 и
0 28 сообщен с органами управления (бустерами) 29 и 30. воздействующими на тормоза 7 и 8, а посредством сливных трубопроводов 31 и 32 золотник сообщен с баком 26. Для регулировки давления в подводящем тру5 бопроводе 24 установлен клапан 33. Золотник 23 также сообщен с демпфером 34, состоящим из цилиндра двухстороннего действия 35 с поршнем 36 и гидравлических сопротивлений (жиклеров) 37 и 38. Корпус
0 39 демпфера заполнен рабочей жидкостью, поступающей по трубопроводу 40 с ограничительным жиклером 41 и сливаемой по трубопроводу 42.
Система управления поворотом гусе5 нмчной машины работает следующим образом.
При прямолинейном движении машины рулевое колесо 18 машины имеет среднее (нейтральное) положение и тяга 19 удержи0 вает фрикционный вариатор 17 в положении, при котором его передаточное число 1 -1, При этом валы 11 и 12 вращаются с одинаковой частотой в одну сторону, а полуосевые шестерни 14 и 16 дифференциала 15 с
5 одинаковой частотой - в разные стороны при неподвижном водиле 20 и фрикционе 21. Неподвижен и связанный с фрикционном золотник 23, а бустера 29 и 30 сообщены со сливными каналами 31 и 32, т.е.
0 тормоза 7 и 8 выключены.
При изменении условий движения например при различных сопротивлениях по бортам машины, ведущие колеса 5 и 6 начинают вращаться с различной частотой вра5 щения (машина начинает входить в поворот), соответственно изменяется частота вращения полуосевых шестерен 14 и 16 дифференциала 17, связанных с ведущими колесами 5 и 6 посредством редукторов 9 и
0 10. Тогда начинает поворачиваться водило 20 дифференциала 17с фрикционом 21, воздействующим на золотник 23 посредством рычага 22. Золотник 23 перемещается в одно из крайних положений, сообщая напор5 ный трубопровод 24 с одним из трубопроводов 27 или 28. Бустера 29 или 30 заполняются рабочей жидкостью, включая при этом в зависимости от направления поворота тормоза 7 или 8. Машина вернется на первоначальную траекторию движения.
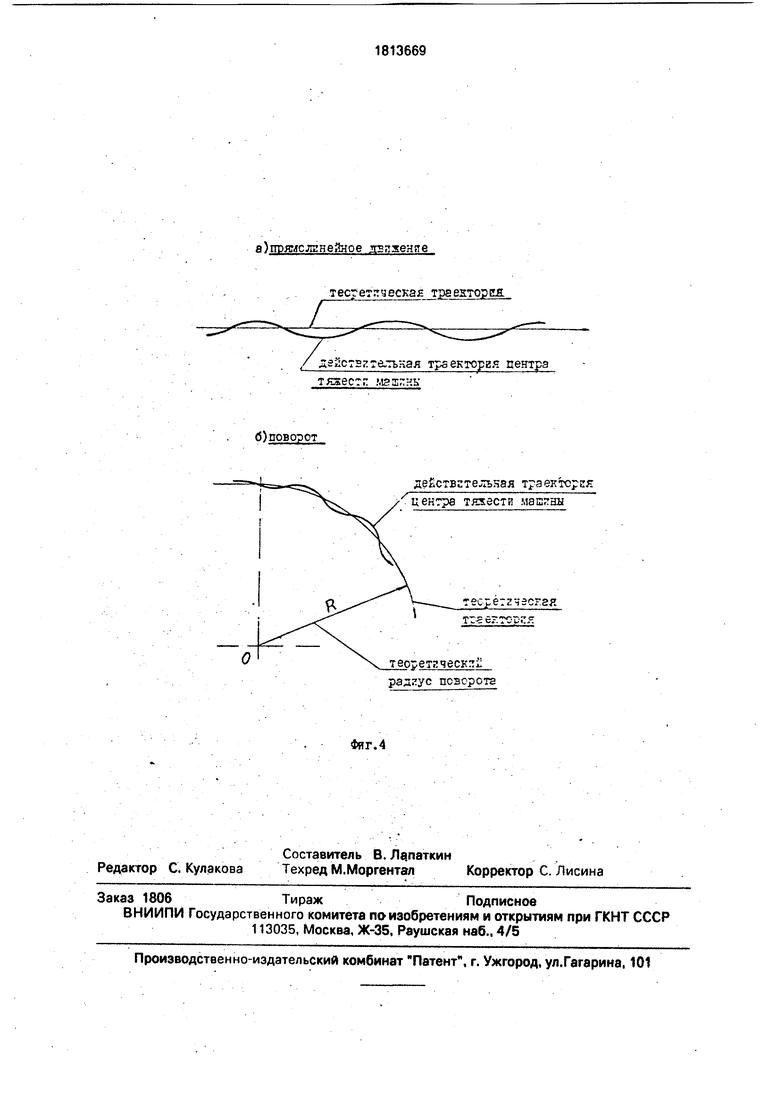
Схема отслеживания прямолинейного движения машины с помощью привода механизма поворота представлена на фиг.4,а.
Для осуществления поворота водитель поворачивает рулевое колесо 18 в требуемом направлении на соответствующий угол. При этом тяга 19, воздействуя на вариатор 17, изменяет его передаточное число. Вследствие этого изменяется частота вращения полуосевой шестерни 16, водило 20 начинает вращаться в соответствующем направлении, посредством фрикциона 21 и рычага 22 перемещается золотник 23, сообщающий с напорной магистралью 24 один из бустеров 29 или 30, который включает соответствующий тормоз 7 или 8, осуществляя тем самым поворот машины. По достижении требуемого радиуса поворота водило 20 останавливается и золотник 23, заняв нейтральное положение, сообщает соответствующий бустер 29 или 30 со сливным каналом 31 или 32. При этом тормоз 7 или 8 выключается, радиус поворота увеличивается и изменяется частота вращения ведущих колес 5 и 6. Однако редуктор 10 посредством вала 12, вариатора 17 и дифференциала 15 вновь перемещает золотник 23, происходит включение соответствующего тормоза 7 или В и радиус поворота машины уменьшается. Таким образом осуществляется постоянное отслеживание радиуса поворота, при этом частота корректировки регулируется с помощью демпфера 35 путем изменения гидравлических сопротивлений 37 и 38.
Если по каким-либо причинам радиус поворота становится меньше того, который определяется углом поворота рулевого колеса, например, при повороте машины на уклоне, то водило 20 дифференциала 15 начинает вращаться в обратную сторону и пе- ремещает золотник 23 в положение, открывающее доступ рабочей жидкости в бустер 29 или 30, соответствующий борту, противоположному повороту, при этом соответствующий тормоз 7 или 8 принудител ь- но увеличивает радиус поворота до тех пор, пока тормоз 7 или 8 не выключится перемещением золотника 23. Таким образом, следящий привод системы управления поворотом исправляет все отклонения от радиуса, задаваемого положением рулевого колеса.
Схема отслеживания радиуса поворота изображена на фиг,4,б.
Использование в предлагаемой системе управления поворотом следящего привода, включающего механическую часть с
фрикционным вариатором и гидравлическую, обеспечивает бесступенчатое регулирование радиуса поворота, что повышает безопасность движения в сложных дорожных условиях. К достоинствам предлагаемого технического решения можно отнести многовариантность исполнения механической части привода.
Формула изобретения
1. Система управления поворотом гусеничной машины/содержащая рулевой привод, механизм поворота, связанный с ведущими колесами и с дифференциальным механизмом посредством шестеренчатых редукторов, элементы управления механизмом поворота, отличающаяся тем, что, с целью повышения безопасности вождения путем обеспечения движения с опреде- ленным радиусом поворота независимо от дорожных условий, она снабжена механизмом с изменяемым передаточным числом, например фрикционным вариатором, установленным между одной из полуосевых шестерен дифференциального механизма и шестеренным редуктором, маломоментным
фрикционном, гидроусилителем, золотник которого через маломоментный фрикцион связан с водилом упомянутого дифференциала, при этом гидроусилитель гидравлически связан с элементами управления
механизма поворота, а рулевой привод кинематически связан с механизмом с изменяемым передаточным отношением. 2. Система по п.1, о т л и ч а ю щ а я е я тем, что, с целью обеспечения оптимальной
частоты включения элементов управления механизма поворота, гидроусилитель снабжен регулируемым демпфером.
а/ 23
а)прямслгнейное двпаеняе.
| название | год | авторы | номер документа |
|---|---|---|---|
| РУЛЕВОЕ УПРАВЛЕНИЕ САМОХОДНОЙ МАШИНЫ | 2005 |
|
RU2297355C2 |
| Способ испытания колесных транспортных средств и стенд для его осуществления | 1982 |
|
SU1146566A1 |
| ВАРИАТОРНЫЙ МЕХАНИЗМ ПОВОРОТА САМОХОДНЫХ МАШИН | 2003 |
|
RU2240246C1 |
| Стенд для испытания транспортных машин | 1981 |
|
SU983486A1 |
| МАШИНА | 2009 |
|
RU2401762C1 |
| Система управления транспортного средства | 1985 |
|
SU1311954A1 |
| КОЛЕСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2407668C2 |
| АВТОМОБИЛЬНОЕ КРАНОВОЕ ШАССИ | 2018 |
|
RU2684838C1 |
| ТРАКТОР | 2009 |
|
RU2401759C2 |
| Транспортное средство | 1981 |
|
SU1008041A1 |
Использование: в транспортном машиностроении, преимущественно в следящих приводах систем управления поворотом гусеничных машин Сущность изобретения: система управления содержит механизм поворота со следящим приводом, включающим механическую и гидравлическую части. Механическая часть включает дифференциал 15, два шестеренчатых редуктора, фрикционный вариатор 17 и маломоментный фрикцион 21. Гидравлическая часть выполнена в виде гидроусилителя с золотником 23, демпфером и органами управления. При этом одна полуосевая шестерня дифференциала 15 через шестеренчатый редуктор соединена с ведущим колесом одного из бортов, другая соединена с ведущим колесом другого борта посредством второго шестеренчатого редуктора и фрикционного вариатора, а водило 20 дифференциала соединено с гидроусилителем посредством ма- ломоментного фрикциона 21, воздействующего на золотник 22, рулевой привод машины соединен с фрикционным вариатором. 2 ил.
тесгет аеская траекторлв.
б)поворот.
действительная траектория пентра тязестг матснк
действительная траектсрея хцентра тяхести масишГ
радиус поворота
| Система управления транспортного средства | 1985 |
|
SU1311954A1 |
