(54) ТЕКЗОРЕЗИСТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕНЗОРЕЗИСТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 2017 |
|
RU2657133C1 |
| Тензометрический преобразователь линейных перемещений | 1988 |
|
SU1634990A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПУЛЬСА | 1993 |
|
RU2077259C1 |
| Датчик малых перемещений | 1988 |
|
SU1585661A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕРТИКАЛЬНЫХ ДЕФОРМАЦИЙ | 2010 |
|
RU2425975C1 |
| СПОСОБ КОНТРОЛЯ НАПРЯЖЕННО-ДЕФОРМИРОВАННОГО СОСТОЯНИЯ В БЛОЧНЫХ СТРУКТУРАХ ГЕОСФЕРЫ, БАЗОВАЯ ОПОРА, ДЕФОРМОМЕТР И РЕГИСТРАТОР | 1995 |
|
RU2097558C1 |
| Кромкоформирующий пресс для двусторонней упрочняющей обработки изделий по скошенным краям их отверстий | 1982 |
|
SU1017509A1 |
| Электромеханический тензометр | 1989 |
|
SU1763879A1 |
| Устройство для измерения величины радиальной раздачи трубы | 1977 |
|
SU732054A1 |
| Устройство для измерения деформации оболочки | 1989 |
|
SU1758410A1 |
1
Изобретение относится к измеритель ной технике, в частности к тензорезисторным преобразователям перемещений, и может быть использовано для измерений деформаций, и перемещений различных материалов и конструкций.
Известен тензорезисторный преобразователь перемещений, содержащий чувствительную скобу с тензорезисторами, регулировочные винты l Недостатками данного преобразователя являются значительные погрешности, обусловленные нелинейностью характеристики преобразования, невозможность ее регулирования и малыйдиапазон измерений, что существенно ограничивает область его применения.
Наиболее близким к предлагаемому является тензорезисторный преобразователь перемещений, содержащий корпус, шток, чувствительную скобу с . тензорезисторами, регулировочные винты и-подвижные опорные ползуны 1.2.
Недостатком такого преобразователя является низкая точность и узкий диапазон преобразования.
Цель изобретения - повышение точности измерения и расширение диапазона преобразования.
Поставленная цель достигается тем, что тензорезисторный преобразователь перемещений снабжен двумя кронштейнами, на которых установлены регулировочные винты и-подвижные опорные ползуны, прикрепленные к концам чувствительной скобы, при зтом одни концы кронштейнов установлены на неподвижной общей оси,второй конец од10ного из кронштейнов соединен с корпусом, а второй конец другого кронштейна соединен со штоком через стержень с изменяемой длиной.
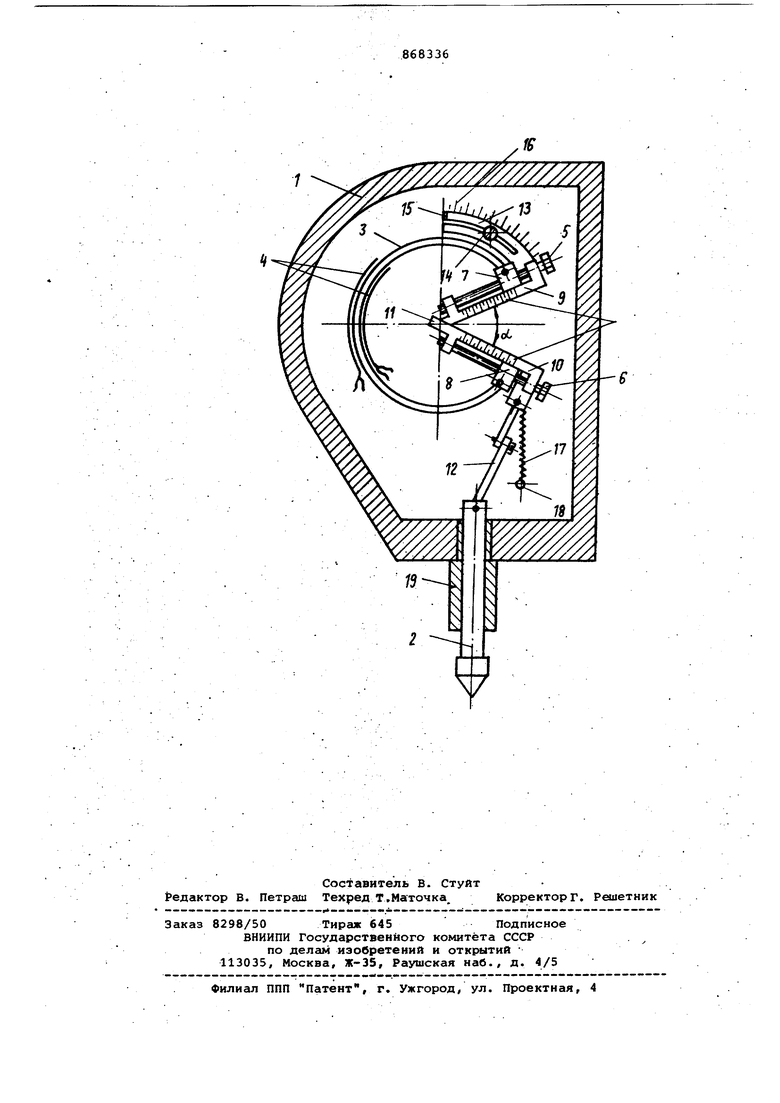
На чертеже изображен предлагаемый преобразователь, общий вид.
Преобразователь состоит из корпуса 1, штока 2, чувствительной скобы 3 с тензорезисторами 4, регулировочных винтов 5 и 6 и подвижных
опорных ползунов 7 и 8, двух крон. штейной 9 и 10, на которых установлены регулировочные винты 5 и 6 и подвижные опорные ползуны 7 и 8, прикрепленные к концам чувствительной скобы 3, при этом одни концы кронштейнов У и 10 установлены на неподвижной общей оси 11, второй конец кронштейна 9 соединен с корпусом 1,
30 а второй конец кронштейна 10 соедией со штоком 2 через стержень 12 изменяемой длиной,
Кронштейр Ч заканчивается кругоой направляющей 13, которая винтом 14 прижимается к корпусу 1. Положение Кронштейна 9 определяется по отетке 15 на круговой направляющей 13 и нониусу .16 на корпусе 1. Кронтейн 10 с помощью стержня 12 с изеняемой длиной сочленен со штоком 2 посредством пружины 17, закрепленной на корпусе 1 винтом 18.
Преобразователь работает следующим образом.
Втулка 1У устанавливается в зажимное устройство (не показано).так,. чтобы шток 2 соприкасался с поверхностью -испытуемого объекта.
Вращением регулировочных винтов 5 и 6 подвижные опорные ползуны 7 и 8 перемещаются вдоль кронштейнов 9 и 10 и устанавливаются на такомрасстоянии от неподвижной оси 11, при котором значение коэффициента преобразования соответствует требуемому. Перемещение объекта воспринимается штоком 2 и через стержень 12 с изменяемой длиной передается на кронштейн 10. Кронштейн 10 поворачивается вокруг неподвижной оси 11 и приводит в движение сопряженную с его подвижным опорным ползуном 8 чувствительную скобу 3, на поверхности . которой установлены тензорезисторы 4. Изгибаясь, чувствительная скоба 3 деформирует тензорезисторы 4. Возникающий при этом электрический сигнал подается на регистрирующее устройство (не показано).
Стержень 12 с изменяемой длиной и круговая направляющая 13 обеспечивают возможность поворота кронштейнов 5 и 6 вокруг неподвижной оси 11 и установку их в положение, при котором абсолютные значения нелинейностей изменения скоростей перемещения кронштейна 10 и электросигна5 ла преобразования равны и противопологкны по знаку.
Таким образом, тензорезисторный преобразователь перемещений позволяет повысить точность преобразователя и расширить диапазон измерений.
Формула изобретения
Тензорезисторный преобразователь
5 перемещений, содержащий корпус, шток, чувствительную скобу с тензорезисторами,, регулировочные винты и подвижные опорные ползуны, отличающийся тем, что, с целью
0 повышения точности измерения и расширения диапазона преобразования, он снабжен двумя кронштейнами, на которых установлены регулировочные винты и подвижные опорные ползуны,прикрепленные к концам чувствительной скобы, при этом одни концы кронштейнов установлены на неподвижной общей оси, второй конец одного из кронштейнов соединен с корпусом,, а второй
{j конец другого кронштейна соединен со штоком через стержень с изменяемой длиной.
Источники информации, C принятые во внимание при экспертизе
