Изобретение относится к горному делу и может использоваться для контроля напряженно-деформированного состояния в блочных структурах геосреды.
Известен способ контроля напряженно-деформированного состояния массива горных пород, включающий выделение границ блоков, установку деформометров в каждом блоке и определение подвижности вмещающих пород в зависимости от технологического цикла добычных работ [1]
Недостатками способа являются отсутствие критериев для выделения границ и определения размеров блоков, невозможность выделения базового блока и определения расстояний для выбора мест установки деформометров при контроле подвижности геоблоков, зависимость измерений от технологического цикла добычных работ.
Наиболее близким к предлагаемому является способ контроля напряженного состояния массива горных пород, заключающийся в измерении осевых деформаций скважины между двумя реперами, установленными в пределах естественных блоков более высокого уровня, размеры и местоположение которых определяют при бурении скважины с отбором самоотделяющихся кернов [2]
Недостатками способа являются отсутствие критериев выбора структуры контролируемых блоков, трудоемкость и неточность определения размеров блоков и расположения границ между ними по отборам керна, невозможность выделения базового блока для установки опорного репера и задания расстояний между деформометрами, используемыми для контроля подвижности группы геоблоков.
Цель предлагаемого изобретения повышение точности и надежности определения подвижности геоблоков.
Поставленная задача решается тем, что в способе контроля напряженно-деформированного состояния блочных структур геосферы, включающем определение границ блоков, измерение деформаций в них с помощью устройства для измерения деформаций, состоящего из деформометров, подключенных к регистратору, и определение и регистрацию подвижности блоков, задают ранг i контролируемых блоков, выделяют на объекте блок с нулевым рангом, принимают его в качестве базового для каждого контролируемого блока, определяют размеры базового °Δ и контролируемых блоков iΔ, границу каждого блока определяют из соотношения:
iΔ = °Δ•2′ (м),
где i 0, ±1, ±2, ±3, а деформацию измеряют в каждом блоке относительно базового блока, при этом в базовом блоке устанавливают опору с неподвижной штангой, деформометры устанавливают подвижно относительно штанги и жестко закрепляют внутри каждого блока i-го ранга на расстоянии друг от друга, определяемом из соотношения:
li = iΔ + δi (м),
где δi величина раскрытия трещин между смежными блоками
а подвижность блоков определяют путем измерения смещений деформометров относительно базовой опоры.
Ранг i контролируемых блоков задают, что позволяет согласовать выбранную структуру контролируемого объекта со схемой установки деформометров и тем самым повысить надежность измерений.
Выделяют на объекте блок с нулевым рангом, что позволяет определить блок, относительно которого измеряют деформации, и тем самым повысить надежность измерений.
Блок с нулевым рангом принимают в качестве базового для каждого контролируемого блока, что позволяет контролировать деформации блоков заданного ранга одновременно и тем самым повышать точность и надежность измерений.
Определяют размеры базового °Δ и контролируемых блоков iΔ в метрах, что позволяет выделять блоки, относительно которых определяется подвижность, и тем самым повышать надежность измерений.
Границу каждого блока определяют из соотношения iΔ = °Δ•2i, что позволяет выделять размеры блоков i-го ранга, подвижность которых определяется, и тем самым повышать точность и надежность измерений.
Деформации измеряют в каждом блоке относительно базового блока, что позволяет определить подвижность контролируемых блоков независимо и тем самым повышать надежность измерений.
В базовом блоке устанавливают базовую опору с неподвижной штангой, что позволяет фиксировать опорную точку отсчета подвижности блоков и тем самым повысить точность и надежность измерений.
Деформометры устанавливают подвижно относительно штанги, что обеспечивает использование общей точки отсчета для группы деформометров и позволяет повысить точность и надежность определения подвижности блоков.
Деформометры жестко закрепляют внутри каждого блока i-го ранга на расстоянии друг от друга, определяемом из соотношения li = iΔ + δi, где δi величина раскрытия трещин между смежными блоками  в метрах, что позволяет устанавливать деформометры в расчетных точках геосферы и тем самым повышать точность и надежность измерений.
в метрах, что позволяет устанавливать деформометры в расчетных точках геосферы и тем самым повышать точность и надежность измерений.
Подвижность блоков определяют путем измерения смещений деформометров относительно базовой опоры, что позволяет измерять и регистрировать движение как отдельного блока, так и группы блоков одновременно и тем самым повышает точность и надежность измерений.
На фиг. 1 изображена блоковая структура геосферы, продольный разрез, и показано размещение базовой опоры и деформометров в блоках контролируемого уровня.
Способ осуществляют следующим образом.
В скважине 1, пересекающей блоки 2, 3, 4, 5, n контролируемого ранга и базовый блок 6 нулевого ранга, устанавливают базовую опору 7, которую жестко соединяют с породой базового блока 6. К опоре 7 жестко прикрепляют штангу 8, на которой устанавливают подвижно относительно штанги деформометры 9. Каждый деформометр 9 жестко закрепляют в i-ом блоке контролируемого ранга на расстоянии li ≃ iΔ + δi друг от друга и присоединяют к общему регистратору 10. Величина раскрытия трещин определяется из соотношения 
Предлагаемый способ может быть осуществлен следующим образом.
В зоне планируемого контроля известным методом (например, с использованием спектрального метода, изложенного В. Н. Опарин. К основам скважинной геофизической дефектоскопии. 1: Спектральный анализ и меры дефектности. //Физико-технические проблемы разработки полезных ископаемых.-1982, N 6, с. 23-33) как по естественным геофизическим признакам, так и с помощью расчетов (например, с использованием методики, изложенной В.Н. Опарин, М.В. Курлени. О скоростном разрезе Земли по Гутенбергу и возможном его геомеханическом объяснении. 1: Зональная геодезинтеграция и иерархический ряд геоблоков. //Физико-технические проблемы разработки полезных ископаемых. 1994, N 2) задают ранг i контролируемых блоков 2, 3, 4, n, подвижность которых необходимо определить, определяют блоковую структуру геосферы и выделяют блоки нулевого ранга. В качестве базового блока 6 принимают, например, следующий за контролируемым блок нулевого ранга. Размеры базового °Δ и контролируемых блоков iΔ, задаваемые в метрах, а также положение границы между ними вычисляют при помощи соотношения iΔ = °Δ•2i (м). Через контролируемые блоки 2, 3, 4, 5, n и базовый блок 6 известным способом при помощи бурового станка сооружают горизонтальную скважину 1.
В скважине 1 внутри базового блока 6 устанавливают базовую опору 7 со штангой 8, проходящей через контролируемые блоки 2, 3, 4, 5,n. Каждый деформометр 9 устанавливают подвижно относительно штанги 8 и жестко закрепляют внутри каждого контролируемого блока 2, 3, 4, 5,n на расстоянии друг от друга, определяемом из соотношения li ≃ iΔ + δi (м), где величина раскрытия трещин между смежными блоками принимается по выражению  Подвижность блоков контролируемого ранга определяют путем измерения смещений деформометров 9 относительно штанги 8, жестко соединенной с базовой опорой 7. Результаты измерений фиксируют при помощи регистратора 10.
Подвижность блоков контролируемого ранга определяют путем измерения смещений деформометров 9 относительно штанги 8, жестко соединенной с базовой опорой 7. Результаты измерений фиксируют при помощи регистратора 10.
Известно устройство крепления датчиков в скважине, содержащее стопорные кулачки, фиксирующее приспособление с поршнем, соединительные тяги, ограничитель хода, микрозаряд взрывчатого вещества с капсюлем-детонатором и нагружающий поршень [3]
Недостатком устройства является использование нагружающего поршня, фиксирующего приспособления и микрозаряда, что усложняет конструкцию, требует сооружения двух соосных скважин, затрудняет многократную установку и ограничивает применение устройства для контроля деформаций в блочных структурах геосферы.
Наиболее близким к предлагаемому является устройство для установки тензорезисторов в скважине, включающее корпус с крышками, втулку, разъем с кабелем, патрубок, неподвижную и подвижную трубки, распорные и запорные штоки, фиксатор, стопор, тросик, подпружиненные муфты и ползуны [4]
Недостатком устройства является использование трубок, фиксаторов, стопоров, запорных штоков, муфт и тросика для подготовки к работе, что усложняет конструкцию устройства, затрудняет его эксплуатацию при многократном применении за счет необходимости взводить механизм распорных штоков вручную, не обеспечивает базовое крепление датчиков вдоль ствола скважины при установке в блочных структурах геосферы.
Цель изобретения обеспечение дистанционного управления и повышение надежности крепления базовой опоры в скважине.
Поставленная задача решается тем, что в базовой опоре, включающей корпус с крышками, разъем с кабелем, распорные элементы, ползуны, пружины и тяги, соединяющие распорные элементы с ползунами, опора снабжена установленными в корпусе электромагнитами с сердечниками, на каждом торце корпуса закреплен стакан с центральным отверстием и продольным пазом, каждый сердечник соединен с ползуном, вставленным в центральное отверстие стакана с возможностью возвратно-поступательного перемещения, а каждый распорный элемент выполнен в виде поворотного рычага с упором и оседержателем и установлен с возможностью перемещения упора через продольный паз.
Базовую опору снабжают установленными в корпусе электромагнитами с сердечниками, что обеспечивает возможность дистанционного управления и повышает надежность крепления базовой опоры при установке в скважине, а также упрощает ее эксплуатацию.
На каждом торце корпуса закрепляют стакан с центральным отверстием и продольным пазом, что позволяет защитить электромагниты от повреждений и тем самым повысить надежность крепления базовой опоры.
Каждый сердечник соединяют с ползуном, вставленным в центральное отверстие стакана с возможностью возвратно-поступательного перемещения, что позволяет перемещать распорный элемент при помощи сердечника и тем самым обеспечивает дистанционное управление и повышает надежность крепления базовой опоры в скважине.
Каждый распорный элемент выполняют в виде поворотного рычага с упором и оседержателем и устанавливают внутри стакана с возможностью перемещения упора через продольный паз, что позволяет преобразовать перемещение ползуна в поворот рычага до контакта упора со стенками скважины и обеспечивает тем самым надежность крепления базовой опоры. Для исключения случайных смещений опоры вдоль ствола скважины рычаги целесообразно устанавливать таким образом, чтобы упоры создавали фиксирующие усилия во встречных направлениях.
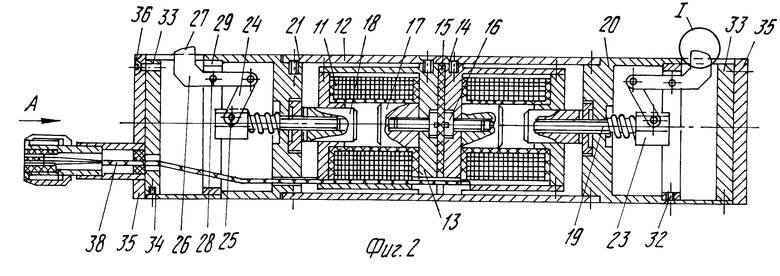
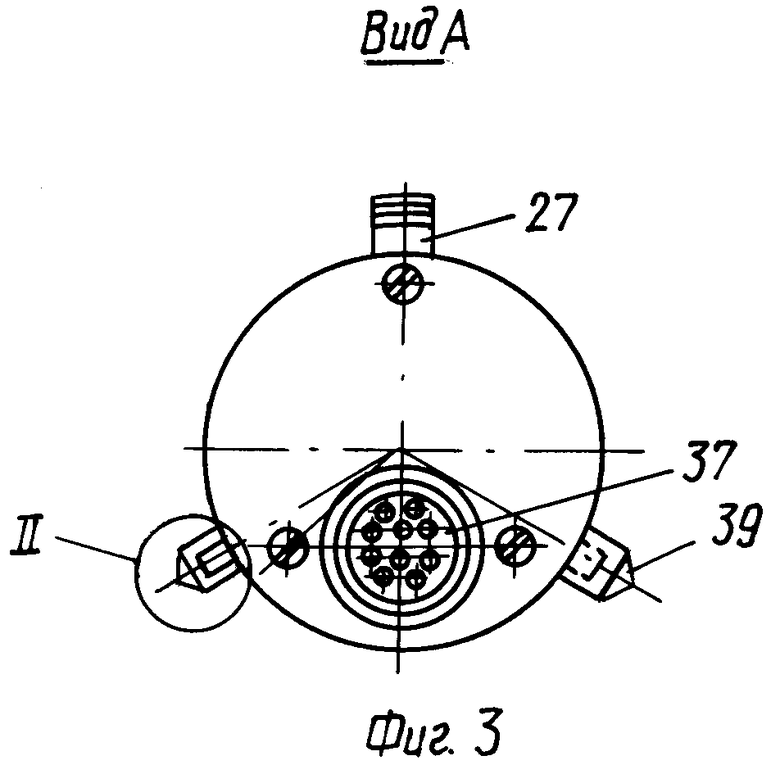
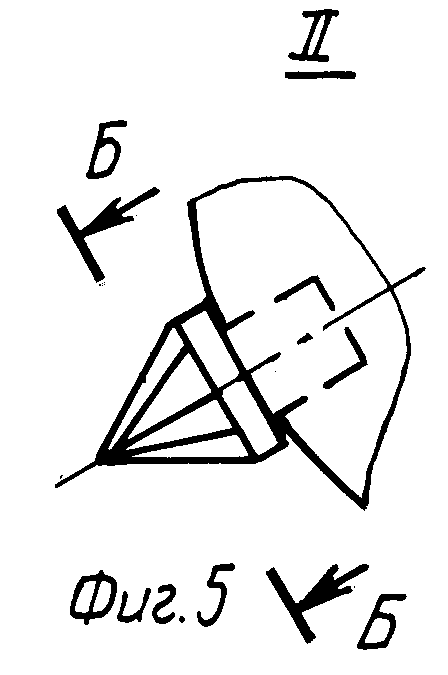
На фиг. 2 изображена схема базовой опоры; на фиг.3 вид А на фиг.2; на фиг. 4 узел I на фиг.2; на фиг.5 узел II на фиг.3; на фиг.6 разрез Б-Б на фиг.5.
Базовая опора содержит два электромагнита 11, установленные в цилиндрическом корпусе 12 и прикрепленные к нему с помощью опорных шайб 13 и винтов 14. Электромагниты 11 изолированы один от другого прокладкой 15. Внутри каждого электромагнита 11 с помощью винта 16 установлен ограничитель 17 хода сердечника 16. Каждый сердечник 18 свободным торцом вставлен внутрь электромагнита 11 с возможностью перемещения до ограничителя 17. С противоположного торца к сердечнику прикреплен при помощи, например, резьбового соединения ползун 19.
Каждый стакан 20 выполнен с центральным отверстием и продольным пазом, установлен на торце корпуса 12 и соединен с ним при помощи винтов 21. В центральное отверстие стакана 20 вставлен ползун 19. На каждом ползуне 19 внутри стакана 20 установлена пружина 22, которая удерживается дном стакана 20 и выступом 23. Каждый ползун 19 при помощи подвижной тяги 24 и осей 25 соединен с поворотным рычагом 26, который снабжен упором 27 и подвижно закреплен при помощи оси 28 в оседержателе 29. Упор 27 (фиг.4) может быть выполнен в виде сегмента 30 с огибающей эллипсной формы и зубчатой насечкой 31. Оседержатель 29 закреплен внутри стакана 20 при помощи винтов 32. Упор 27 может перемещаться через продольный паз стакана 20.
В свободный торец каждого стакана 20 вставлен центрирующий вкладыш 33, прикрепляемый винтами 34. Снаружи на торцах установлены крышки 35, закрепляемые винтами 36.
На одной из крышек 35 установлен разъем 37 для жесткого соединения штанги с опорой и подключения с помощью проводника 38 электромагнитов 11 к источнику электрического тока (не показаны). На каждом стакане 20 установлены по два неподвижных опорных шипа 39 (фиг.3). Упор 27 рычага 26 и шипы 39 расположены относительно друг друга под углом 120oC.
Шип 39 может быть выполнен в виде конуса (фиг.3) или многогранной призмы 40 (фиг.5, 6).
Предлагаемая базовая опора работает следующим образом.
После подключения к источнику электрического тока (не показан) электромагнит 11 втягивает сердечник 18, который перемещается внутри электромагнита 11 до упора в ограничитель 17 и удерживается в этом положении до отключения электромагнита. При втягивании сердечник 18 перемещает ползун 19, который выступом 23 сжимает пружину 22 и перемещает тягу 24. Тяга 24 поворачивает рычаг 26, при этом упор 27 смещается внутрь стакана 20. Затем опору при помощи штанги (не показана) устанавливают в скважине. В расчетной точке электромагнит 11 обесточивают, сердечник 18 освобождается от действия электромагнитных сил, ползун 19 под действием пружины 22 начинает перемещаться внутрь стакана 20 и посредством тяги 24 разворачивает рычаг 26 вокруг оси 28. Упор 27 рычага 26 через продольный паз стакана 20 входит в зацепление со стенкой скважины, обеспечивая с помощью шипов 37 устойчивое соединение с породой. Надежность крепления опоры повышается в результате использования двух встречно ориентированных рычагов 26, которые создают фиксирующие усилия во встречном направлении.
Известно устройство для регистрации мест деформации горного массива, включающее преобразователи деформаций в виде электрических сопротивлений, выполненных из тонких трубок с нанесенным на них токопроводящим материалом, и регистратор, выполненный в виде пронумерованных индикаторных элементов [5]
Недостатком устройства является использование электрических сопротивлений, выполненных из тонких трубок с нанесенным на них токопроводящим материалом, и индикаторных элементов, что приводит к разрушению преобразователя при деформациях массива и не позволяет определить и регистрировать амплитуду деформаций.
Наиболее близким к предлагаемому является устройство для фотоэлектрического измерения деформаций, включающее корпус с каналами, шток, фотоэлементы, соединенные металлической лентой, источник света, призму, пружину, регулировочный винт и регистратор [6]
Недостатками устройства являются соединение фотоэлементов металлической лентой, настройка расчетного диапазона при помощи регулировочного винта и закрепление штока стопорным винтом, что требует дополнительной настройки на расчетный диапазон измерений при перестановке прибора, не позволяет измерять амплитуду деформаций, ограничивает чувствительность и усложняет эксплуатацию устройства.
Цель изобретения повышение точности, чувствительности и надежности измерений.
Поставленная задача решается тем, что в деформометре, включающем корпус и установленные в нем штангу, источники и приемник излучения и распорный узел, корпус установлен подвижно относительно штанги, штанга снабжена боковыми отверстиями, каждый источник излучения размещен внутри штанги напротив бокового отверстия, приемник излучения выполнен в виде линейки чувствительных элементов, снабженных электронным выходом и закрепленных в корпусе напротив боковых отверстий штанги, а распорный узел состоит из опорного элемента, эксцентрика с пружиной и подвижного стержня с шарнирным соединением на каждом торце, проходящего через опорный элемент и корпус параллельно штанге, причем эксцентрик установлен в опорном элементе, который жестко прикреплен к корпусу.
Корпус устанавливают подвижно относительно штанги, что обеспечивает смещение деформометра как относительно штанги, так и относительно базовой опоры, жестко соединенной со штангой, и позволяет тем самым повысить точность и надежность измерений.
Штангу снабжают боковыми отверстиями, а каждый источник излучения размещают внутри штанги напротив бокового отверстия что позволяет создать излучение от источника в виде остронаправленного луча с минимальным рассеянием и тем самым повысить точность и чувствительность измерений.
Приемники излучения выполняют в виде линейки чувствительных элементов, снабженных электронным выходом и закрепленных в корпусе напротив боковых отверстий штанги, что позволяет установить чувствительные элементы с заданным интервалом относительно друг друга, обеспечивает получение электрических сигналов от чувствительных элементов и тем самым повышает точность, чувствительность и надежность измерений.
Распорный узел выполняют в виде опорного элемента, эксцентрика с пружиной и подвижного стержня с шарнирным соединением на каждом торце, проходящего через опорный элемент и корпус параллельно штанге, причем эксцентрик установлен в опорном элементе, который жестко прикреплен к корпусу, что позволяет закреплять в горном массиве каждый деформометр индивидуально и тем самым повышать точность и надежность измерений.
Для повышения надежности и устойчивости крепления деформометра в скальных породах опорный элемент целесообразно выполнять в виде диска с опорными шипами, а для крепления в осадочных породах в виде многогранной призмы.
Для повышения точности и чувствительности измерений каждый источник излучения целесообразно выполнять в виде излучательного светодиода, а приемники в виде монолитной линейки фоточувствительных элементов.
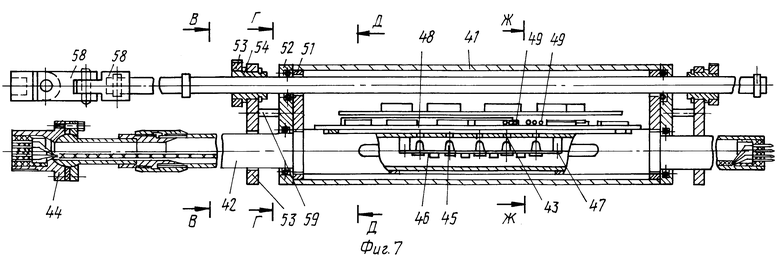
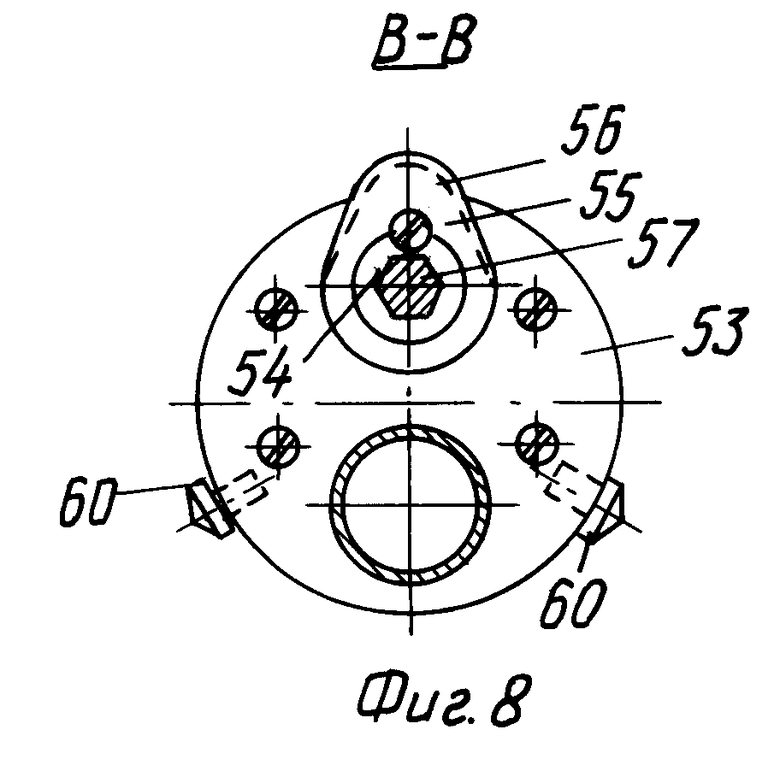
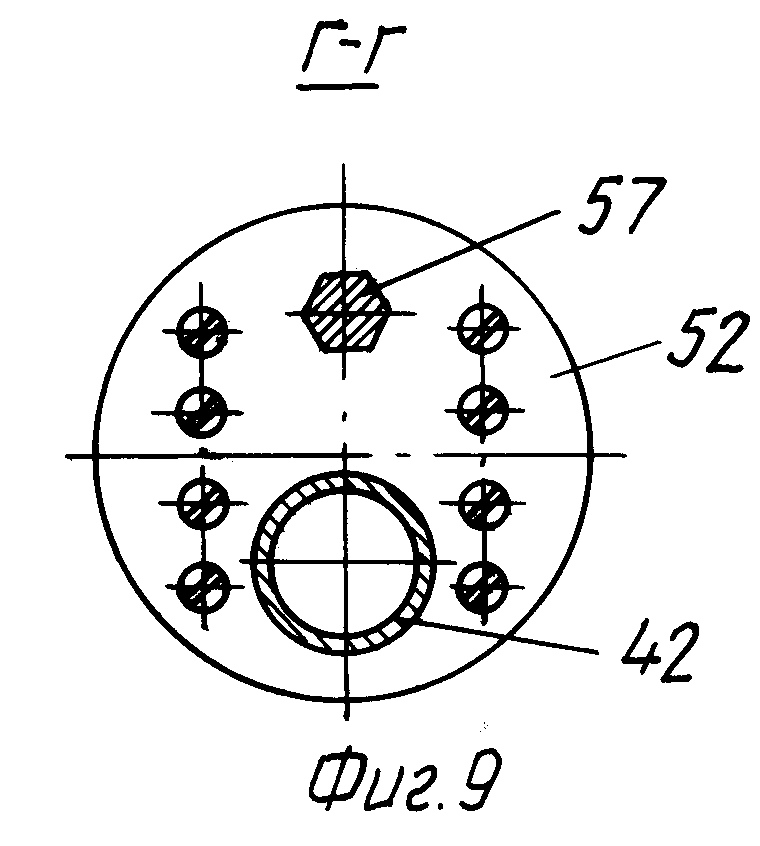
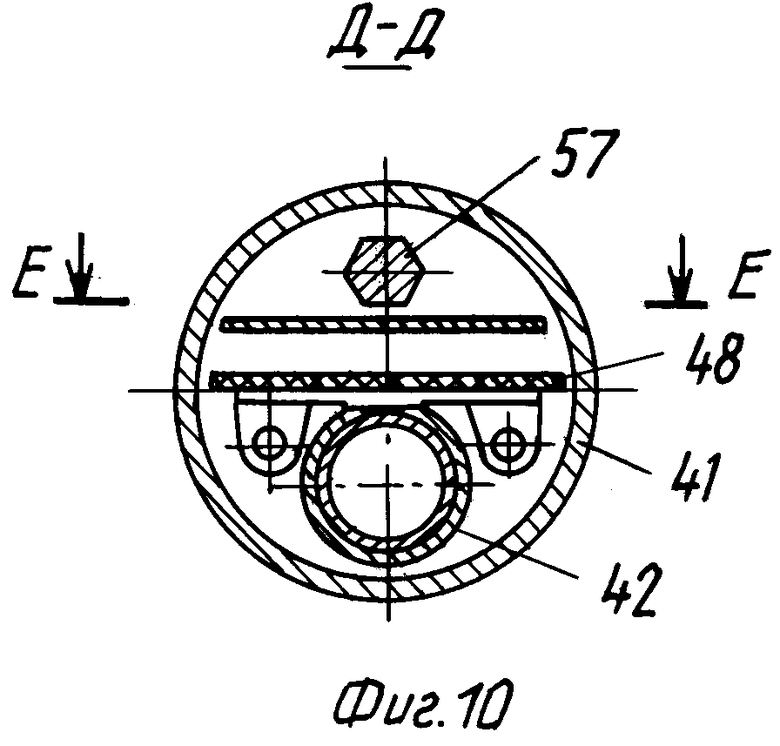
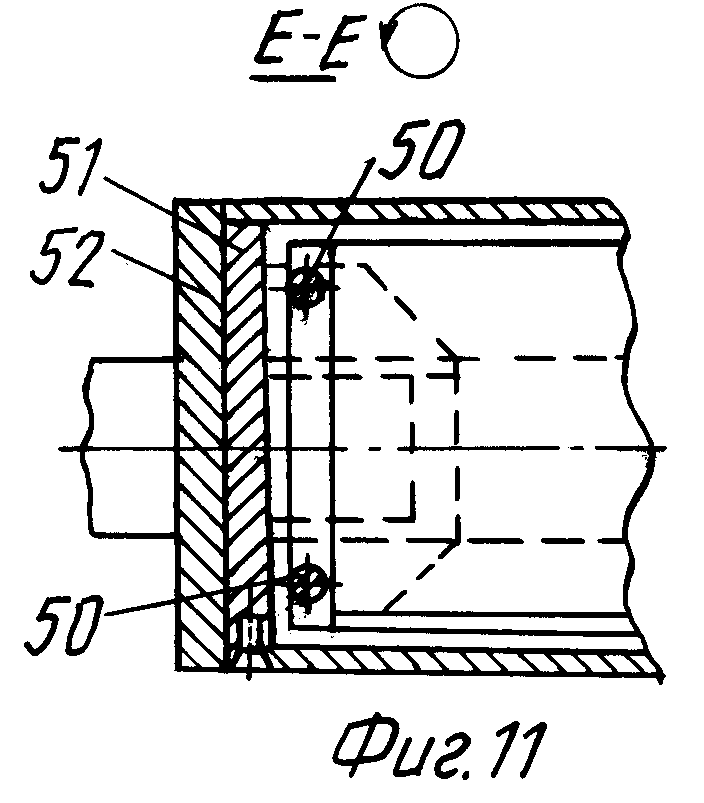
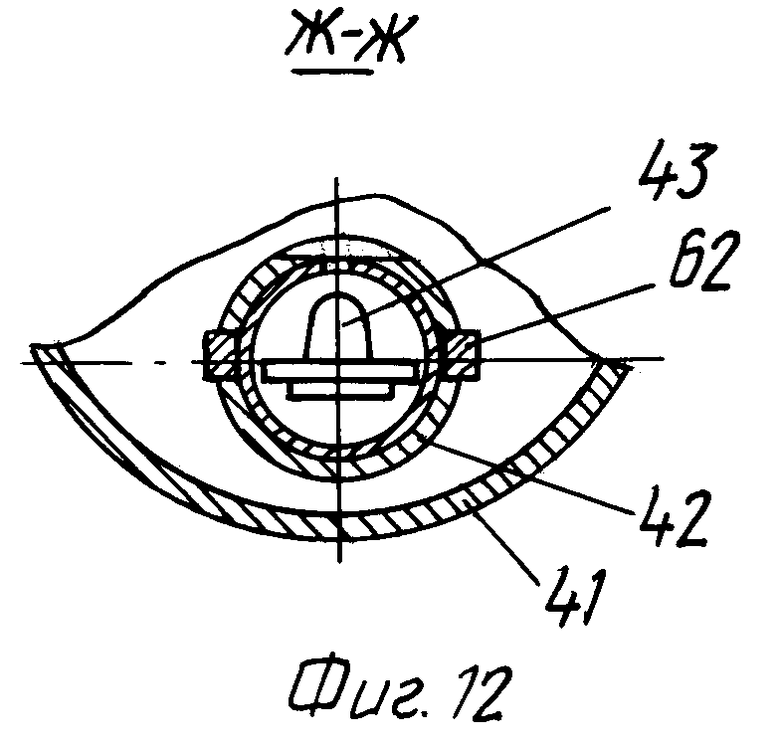
На фиг.7 показан деформометр, продольный разрез; на фиг.8 разрез В-В на фиг. 7; на фиг.9 разрез Г-Г на фиг.7; на фиг.10 разрез Д-Д на фиг.7; на фиг. 11 разрез Е-Е на фиг.10; на фиг.12 разрез Ж-Ж на фиг.7; на фиг.13 -то же, что на фиг.8 (вариант).
Деформометр содержит цилиндрический корпус 41, внутри которого проходит штанга 42, выполненная в виде трубы с боковыми отверстиями 43. На каждом торце штанги 42 установлен шарнирный разъем 44, внутри штанги 42 напротив боковых отверстий 43 жестко закреплены источники 45 излучения, соединенные со штангой 42 при помощи пластины 46 и винтов 47. Напротив боковых отверстий 43 штанги 42 на плате 48 установлены в линейку приемники 49 излучения. Плата 48 жестко крепится внутри корпуса 41 при помощи винтов 50 (фиг.10). С каждого торца в корпус 41 вставлен вкладыш 51, прикрепляемый к корпусу 41 винтами. Снаружи каждый торец корпуса 41 закрыт крышкой 52.
Распорный узел содержит опорный элемент 53, в котором установлена поворотная втулка 54 с неподвижно закрепленным на ней эксцентриком 55. По профилю эксцентрика 55 установлена плоская спиральная пружина 56. Через втулку 55, опорный элемент 53 и корпус 41 параллельно штанге 42 проходит подвижный стержень 57, снабженный установленным на каждом торце шарнирным соединением 58. Каждый опорный элемент 53 жестко прикреплен к корпусу 41 при помощи стоек 59.
Корпус 41 с опорными элементами 53 установлен подвижно относительно штанги 42 в продольном направлении. Стержень 57 установлен с возможностью поворота внутри корпуса 41.
Опорный элемент 53 может быть выполнен в виде диска с опорными шипами 60 (фиг.8) или в виде многогранной призмы 61 (фиг.13).
Источник излучения 45 может быть выполнен в виде излучательного светодиода 62 (фиг.12), а приемники 49 выполнены в виде монолитной линейки фоточувствительных элементов.
Предлагаемый деформометр работает следующим образом.
Корпус 41 деформометра устанавливают на штанге 42, которую при помощи шарнирного разъема 44 соединяют с базовой опорой 6 (фиг.1) и закрепляют в расчетной точке ствола скважины. При установке в скважине выступы эксцентриков 55 должны быть повернуты вовнутрь, т.е. к штанге 42, чтобы не препятствовать перемещению деформометра по стволу скважины. Для закрепления деформометра в скважине стержень 57 поворачивают вокруг его оси. Эксцентрики 55, разворачиваясь, входят в соприкосновение со стенкой скважины и перемещают опорные элементы 53 и корпус 41 в поперечном направлении до упора шипов 60 в стенки скважины. Для равномерного поджатия каждый эксцентрик 55 снабжают пружиной 56, которая при достижении расчетного усилия прогибается, обеспечивая разворот противоположного эксцентрика. В случае установки в осадочных породах в качестве опорного элемента целесообразно использовать многогранную призму 61, которая обеспечивает более эффективное сцепление.
В случае установки группы деформометров каждый последующий модуль подсоединяется при помощи шарнирного разъема 44 на штанге 42 и шарнирного соединения 58 на стержне 57. После установки в скважине и подключения к регистратору прибор готов к работе.
Непосредственно измерения заключаются в том, что каждый источник 45 излучения через отверстие 43 посылает остронаправленный луч на линейку приемников 49. Так как базовая опора 7 (фиг.1) закреплена неподвижно в базовом блоке 6 и жестко соединена со штангой 42 (фиг.7), а корпус 41 деформометра установлен относительно штанги 42 и неподвижно закреплен в i-ом контролируемом блоке, который с помощью трещин отделен от базового блока 6, то в случае продольных подвижек контролируемого блока относительно базового блока 6 корпус 41 деформометра будет смещаться вдоль штанги 42. Соответственно смещается относительно отверстий 43 линейка приемников 49, что будет зафиксировано и расшифровано в регистраторе в виде сигнала, пропорционального смещению контролируемого блока.
Известен регистратор, содержащий электронный измеритель напряжений и тарировочный график [6]
Недостатком регистратора является использование измерителя напряжений и тарировочного графика, с помощью которого по разности напряжений определяют деформации, что усложняет оперативную обработку и накопление информации при больших объемах измерений.
Наиболее близким к предлагаемому является блок регистрации, содержащий усилители, регистрирующий прибор, компаратор, пиковые детекторы, счетчик, триггер, формирователь сигнала записи, анализатор, аналого-цифровой преобразователь, субблок памяти, светодиоды для индикации адреса, органы управления и выносной блок индикации на газоразрядных индикаторах [7]
Недостатком блока индикации является наличие усилителя, аналого-цифрового преобразователя, регистрирующего прибора, субблока памяти, выносного блока индикации, светодиодов для индикации адреса, что не позволяет регистрировать деформации в группе геоблоков, требует пересчета позиционного двоичного кода адреса в десятичный при визуальном контроле, снижает точность измерений, ограничивает надежность регистрации информации и затрудняет оперативную работу с прибором.
Цель предлагаемого изобретения повышение оперативности обработки и надежности накопления информации при измерении деформаций в группе геоблоков.
Поставленная задача решается тем, что в регистраторе, включающем блок питания, измерительный зонд, содержащий усилитель, передатчик и приемник излучения, и блок регистрации, состоящий из блока индикации, формирователя режимов работы и субблока памяти, измерительный зонд снабжен формирователями сигнала запроса и управляющих импульсов, дешифратором адреса, двоичным счетчиком и последовательно соединенными коммутатором, компаратором, формирователем импульсов записи, регистром хранения данных и шифратором, блок регистрации снабжен генератором тактовых импульсов, формирователем адресов, дешифратором сигнала, мультиплексором, регистратором данных, шифратором и магнитофоном, передатчик в виде источника излучения, соединенного с источником питания, приемник выполнен в виде линейки чувствительных элементов, а субблок памяти выполнен в виде оперативного запоминающего устройства, при этом в измерительном зонде выход линейки чувствительных элементов соединен с одним из входов коммутатора, к второму входу которого подключен один из выходов двоичного счетчика, второй и третий выходы которого подключены соответственно к входу формирователя управляющих импульсов и к второму входу регистра хранения данных, выходы формирователя управляющих импульсов подключены соответственно к входу приемников излучения и к второму входу формирователя импульсов записи, к третьему входу которого подключен один из выходов формирователя сигнала записи, к входу которого подключен выход дешифратора адреса, а второй, третий и четвертый выходы формирователя сигнала запроса подсоединены соответственно к третьему входу регистра хранения данных, к второму входу шифратора и к одному из входов усилителя, к информационному входу которого подключен выход шифратора, выход усилителя соединен с информационным входом дешифратора сигнала блока регистрации, входы двоичного счетчика и дешифратора адреса соединены соответственно с выходом генератора тактовых импульсов блока регистрации и с выходом формирователя адресов, причем в блоке регистрации дешифратор сигнала, оперативное запоминающее устройство, мультиплексор, регистр хранения данных и блок индикации соединены последовательно, а к их вторым входам, к третьим входам мультиплексора и оперативного запоминающего устройства и к одному из входов формирователя адресов подключены выходы формирователя режимов работы, к входу которого подключен второй выход генератора тактовых импульсов, а его третий вход подключен к второму входу формирователя адресов, а второй выход регистра хранения данных через шифратор подключен к магнитофону.
Снабжение зонда формирователями сигнала запроса и управляющих импульсов адреса и двоичным счетчиком позволяет синхронизировать последовательность опроса измерительных зондов в группе и обеспечивает адресную передачу данных, что повышает оперативность обработки и надежность хранения информации при измерении деформаций в геоблоках.
Снабжение зонда последовательно соединенными коммутатором, компаратором и формирователем импульсов записи позволяет сравнивать электрический сигнал измеряемого параметра с опорным сигналом и формировать двоично-десятичный код измеряемого параметра, что повышает оперативность обработки данных при измерении деформаций геоблоков.
Снабжение зонда регистром обеспечивает выделение и хранение текущего значения измеряемого параметра до поступления запроса на передачу информации в блок регистрации, что повышает надежность хранения данных при измерении деформаций.
Снабжение зонда шифратором обеспечивает преобразование закодированных данных к виду, удобному для передачи в блок регистрации, что повышает оперативность передачи информации о деформациях геоблоков.
Снабжение блока регистрации генератором тактовых импульсов и формирователем адресов позволяет синхронизировать последовательность опроса измерительных зондов по времени и обеспечивает адресный прием данных, что повышает оперативность обработки и надежность хранения информации при накоплении данных по деформациям геоблоков.
Снабжение блока регистрации дешифратором сигнала, мультиплексором и регистратором хранения данных обеспечивает преобразование принятых от измерительных зондов данных в двоичный код, позволяет запомнить данные в регистре и передавать эти данные в субблок памяти, что обеспечивает оперативность обработки и надежность хранения информации о деформациях геоблоков.
Снабжение блока регистрации шифратором и магнитофоном обеспечивает преобразование закодированных данных к виду, удобному для записи на долговременном носителе информации, что повышает надежность длительного хранения данных о деформациях геоблоков.
Выполнение передатчика в виде источника излучения, соединенного с источником питания, исключает механическую связь между корпусом деформометра и штангой и позволяет непрерывно посылать луч на приемник излучения, что обеспечивает оперативность обработки информации при деформациях геоблоков.
Выполнение приемника в виде линейки чувствительных элементов позволяет непрерывно отслеживать отклонение луча при перемещении корпуса деформометра в случае деформирования i-го геоблока относительно базового геоблока, так как источник излучения посредством штанги и базовой опоры связан с базовым геоблоком, а приемник, закрепленный в корпусе деформометра, посредством опорного элемента жестко соединен с i-ым геблоком, что обеспечивает оперативность обработки информации о деформациях геоблоков.
Выполнение субблока памяти в виде оперативного запоминающего устройства позволяет накапливать и предварительно обрабатывать данные о деформациях контролируемой группы геоблоков в заданном временном интервале, что обеспечивает оперативность обработки и надежность хранения информации о деформациях геоблоков.
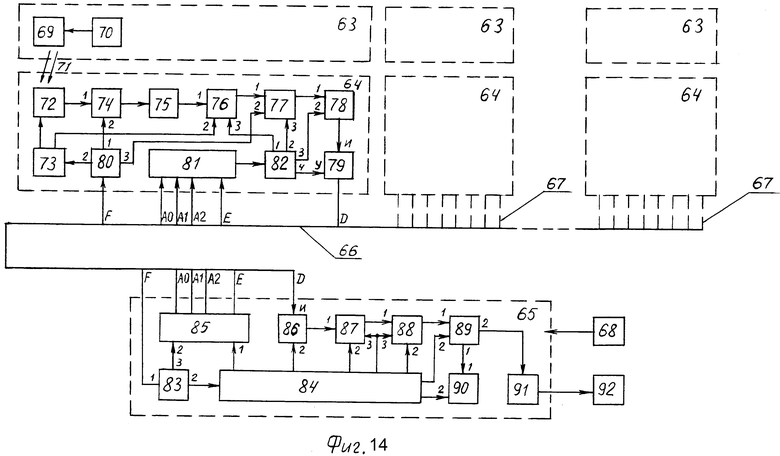
На фиг.14 показана функциональная схема регистратора.
Регистратор содержит измерительный зонд, в состав которого входит передатчик 63 излучения, устанавливаемый внутри штанги 42 (фиг.7), приемник 64 излучения, устанавливаемый на плате 48 внутри корпуса 41 (фиг.7) i-го деформометра, и блок 65 регистрации, размещаемый в отдельном корпусе 10. Блок 65 регистрации соединен с приемником 64 излучения при помощи кабеля 66 и разъемов 67 и подключен к блоку 68 питания.
Передатчик 63 излучения содержит источник 69 излучения, вход которого подключен к источнику 70 питания. Выходом источника 69 излучения является остронаправленный луч 71.
Приемник 64 излучения выполнен в виде линейки 72 чувствительных элементов, имеющих общий управляющий вход, соединенный гальванически с выходом формирователя 73 управляющих импульсов. Информационные входы линейки 72 чувствительных элементов имеют оптическую связь с источником 69 излучения при помощи остронаправленного луча 71, а общий информационный выход соединен с одним из входов коммутатора 74.
Выход коммутатора 74 соединен с входом компаратора 75, выход которого соединен с одним из входов формирователя 76 импульсов записи, а его второй вход соединен с выходом формирователя 73 управляющих импульсов. Выход формирователя 76 импульсов записи соединен с одним из входов регистра 77 хранения данных. Выход регистра 77 хранения данных соединен с входом шифратора 78, выход которого соединен с информационным входом усилителя 79. Второй вход коммутатора 74, вход управления формирователя 73 управляющих импульсов и второй вход регистра 77 хранения данных соединены соответственно с первым, вторым и третьим выходами двоичного счетчика 80.
В состав приемника 64 излучения входит также дешифратор 81 адреса, выход которого соединен с входом формирователя 82 сигнала запроса. Первый, второй, третий и четвертый выходы формирователя 82 сигнала запроса соединены соответственно с третьими входами формирователя 76 импульсов записи и регистра 77 хранения данных, с вторым входом шифратора 78 и управляющим входом усилителя 79.
Блок 65 регистрации содержит генератор 83 тактовых импульсов, первый, второй и третий выходы которого соединены соответственно с входом двоичного формирователя 84 режимов работы и вторым входом формирователя 85 адресов. Выходы формирователя 85 адресов посредством кабеля 66 и разъемов 67 соединены с входами дешифратора 81 адреса, а информационный вход дешифратора 86 сигнала соединен с выходом усилителя 79. Выход дешифратора 86 сигнала соединен с первым входом оперативного запоминающего устройства 87, выход которого соединен с первым входом мультиплексора 88. Выход мультиплексора 88 соединен с первым входом регистра 89, первый выход которого соединен с первым входом блока 90 индикации, а второй выход соединен с входом шифратора 91. Выход шифратора 91 соединен с входом магнитофона 92. Выходы формирователя 84 режимов работы соединены с первым входом формирователя 85 адресов, вторыми входами дешифратора 86 сигнала, оперативного запоминающего устройства 87, мультиплексора 88, регистра 89 хранения данных и блока 90 индикации и третьими входами оперативного запоминающего устройства 87 и мультиплексора 88.
Блок 65 регистрации позволяет подключить и обрабатывать информацию от группы измерительных зондов, содержащих передатчики 63 и приемники 64 излучения.
Предлагаемый регистратор работает в ручном и автоматическом режимах управления.
Ручной режим управления позволяет задавать количество опрашиваемых каналов измерения (измерительных зондов в группе), определить интервал времени между опросами каналов, устанавливать режим работы с магнитофоном, контролировать по индикатору информацию о деформациях массива.
Автоматический режим управления позволяет проводить опрос заданных каналов измерения, накопление измерений по каждому каналу, перезапись информации с оперативного запоминающего устройства на магнитофон.
Измерительный зонд работает в двух режимах: режиме измерений и режиме передачи данных. При возникновении подвижек i-го геоблока линейка 72 чувствительных элементов перемещается относительно луча 71, генерируемого источником 69 излучения. Чувствительный элемент линейки, на который попадает остронаправленный луч 71, преобразует излучение в электрический сигнал, который через коммутатор 74 поступает на компаратор 75, где производится сравнение с опорным сигналом.
При совпадении сигналов определяется номер опрашиваемого чувствительного элемента линейки 72. Периодичность опроса и порядок сканирования элементов линейки 72 задается формирователем 73 управляющих импульсов.
Сигнал с компаратора 75 поступает на формирователь 76 импульсов записи, где преобразуется в форме, удобной для записи в регистр 77 хранения. Сформированный в результате перемещения линейки 72 относительно луча 71 сигнал накапливается в виде двоичного кода в регистре 77 хранения данных, где хранится до поступления сигнала запроса от блока 65 регистрации.
Работа блока 65 регистрации заключается в периодическом опросе группы измерительных зондов и накоплении полученной информации. Последовательность опроса задается генератором 83 тактовых импульсов и формирователем 84 режимов работы. Сигнал запроса данных измерения от i-го зонда формируется формирователем 85 адресов, откуда передается в дешифратор 81 адреса измерительного зонда, где сигнал управления расшифровывается и запускает работу формирователя 82 сигнала запроса. При этом информация из регистра 77 передается в шифратор 78, где преобразуется в последовательный код, удобный для передачи по каналу связи. Последовательный код через усилитель 79 и кабель 66 связи передается в дешифратор 86 сигнала блока 65 регистрации, где преобразуется в параллельный двоичный код и заносится в оперативное запоминающее устройство 87. Одновременно фиксируется адрес замера, определяемый формирователем 84 режимов работы.
При заполнении оперативного запоминающего устройства 87 формирователь 84 режимов работы включает магнитофон 92 для перезаписи информации. При этом данные из оперативного запоминающего устройства 87 через мультиплексор 88 поступают в регистр 89, откуда при помощи шифратора 91 преобразуются в последовательный код и записываются на магнитофон 92 для хранения и дальнейшей обработки.
Визуальный контроль данных обеспечивает блок 90 индикации, который позволяет отображать режим работы, адрес канала измерения и данные измерений по этому каналу.
Работа в автоматическом режиме позволяет вести непрерывный контроль за состоянием геоблоков в массиве горных пород. Возможности, заложенные в схему регистратора, позволяют использовать компьютер для обработки информации. Эксплуатация устройства не требует высококвалифицированного персонала и может осуществляться одним человеком, причем основной объем работ связан с установкой прибора, а эксплуатация в автоматическом режиме требует лишь периодического контроля.


Изобретение относится к горному делу и может использоваться для контроля напряженно-деформированного состояния в блочных структурах геосреды. Сущность изобретения: подвижность геоблоков различного иерархического уровня относительно базового определяют при помощи продольного деформометра с неподвижной базовой опорой и автоматическим регистратором. Блоки контролируемого уровня могут выбираться как по естественным геофизическим признакам, так и расчетным методом. При этом в корпусе базовой опоры установлены электромагниты с сердечниками и распорными элементами в виде рычагов с упорами, вставленными с возможностью встречного разворота. Деформометр выполнен в виде штанги, закрепляемой неподвижно на базовой опоре, и подвижного относительно штанги корпуса с распорным узлом для установки корпуса в осадочных или скальных грунтах. Внутри штанги установлены источники излучения, а в корпусе закреплены приемники излучения для определения и регистрации перемещений контролируемых геоблоков. Регистратор выполнен в виде электронного устройства для определения, преобразования и накопления информации о величине смещений в контролируемых блоках относительно базового. 4 с. и 4 з.п. ф-лы, 14 ил.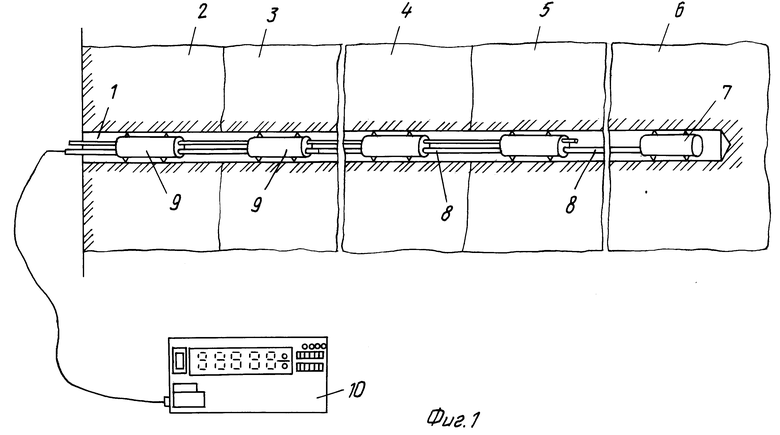
iΔ = °Δ•2′, м,
где i 0, ± 1, ± 2, ± 3,
а деформацию измеряют в каждом блоке относительно базового блока, при этом в базовом блоке устанавливают базовую опору с неподвижной штангой, деформометры устанавливают подвижно относительно штанги и жестко закрепляют внутри каждого блока i-го ранга на расстоянии друг от друга, определяемом из соотношения
li = iΔ + δi, м,
где δi - величина раскрытия трещин между смежными блоками
а подвижность блоков определяют путем измерения смещений деформометров относительно базовой опоры.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, авторское свидетельство, 1756564, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| SU, авторское свидетельство, 1745927, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| SU, авторское свидетельство, 1350349, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| SU, авторское свидетельство, 1714125, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| SU, авторское свидетельство, 1460258, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| SU, авторское свидетельство, 810968, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| SU, авторское свидетельство, 1634781, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |

