(54) СИЛЬНОТОЧНЫЙ КОММУТИРУЮЩИЙ АППАРАТ
| название | год | авторы | номер документа |
|---|---|---|---|
| СИЛЬНОТОЧНЫЙ БЫСТРОДЕЙСТВУЮЩИЙ РЕВЕРСИВНЫЙ КОММУТИРУЮЩИЙ АППАРАТ | 1993 |
|
RU2084983C1 |
| СИЛЬНОТОЧНЫЙ КОММУТАЦИОННЫЙ АППАРАТ | 1988 |
|
SU1559956A1 |
| ЭЛЕКТРИЧЕСКИЙ РАЗЪЕДИНИТЕЛЬ | 2018 |
|
RU2703989C2 |
| АВТОМАТИЧЕСКИЙ ВЫКЛЮЧАТЕЛЬ | 2008 |
|
RU2393576C1 |
| СИЛЬНОТОЧНЫЙ ЗАМЫКАТЕЛЬ МНОГОКРАТНОГО ДЕЙСТВИЯ | 2011 |
|
RU2515513C2 |
| Автогазовое дугогасительное устройство | 1980 |
|
SU978224A2 |
| Коммутационный аппарат | 1982 |
|
SU1070621A1 |
| Контактное устройство | 1982 |
|
SU1051603A1 |
| Контактор | 1978 |
|
SU743057A1 |
| Контактная система сильнонотчного коммутирующего аппарата | 1975 |
|
SU554564A1 |
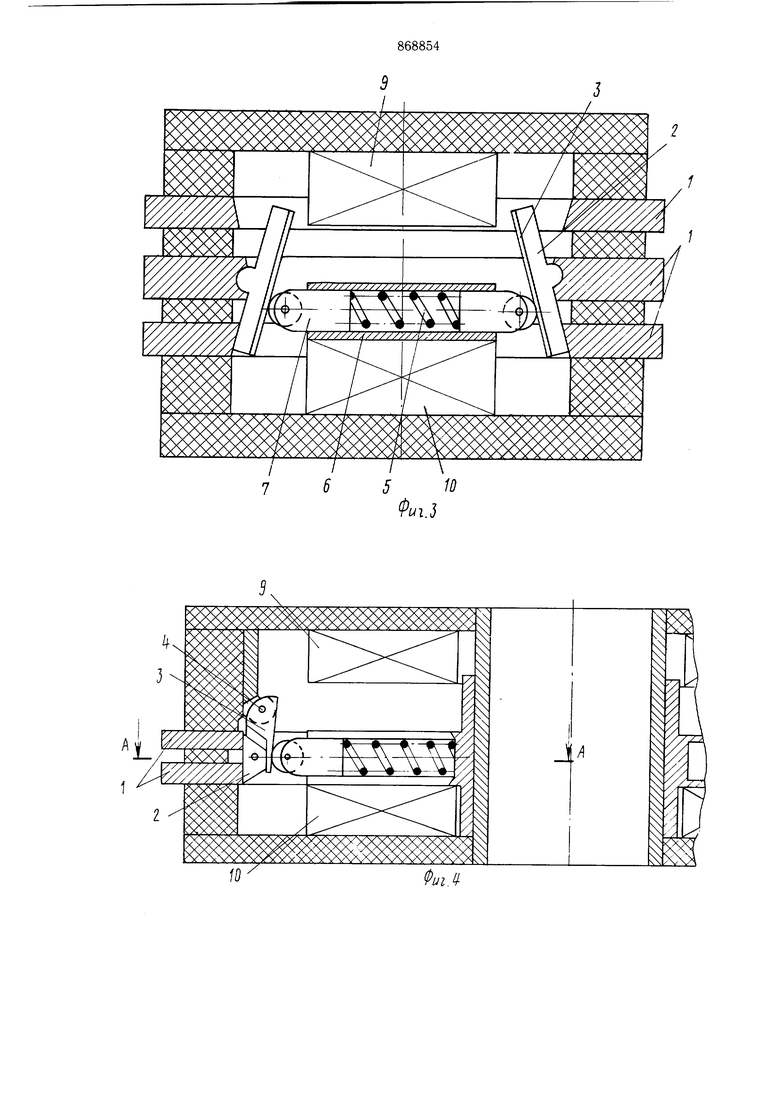
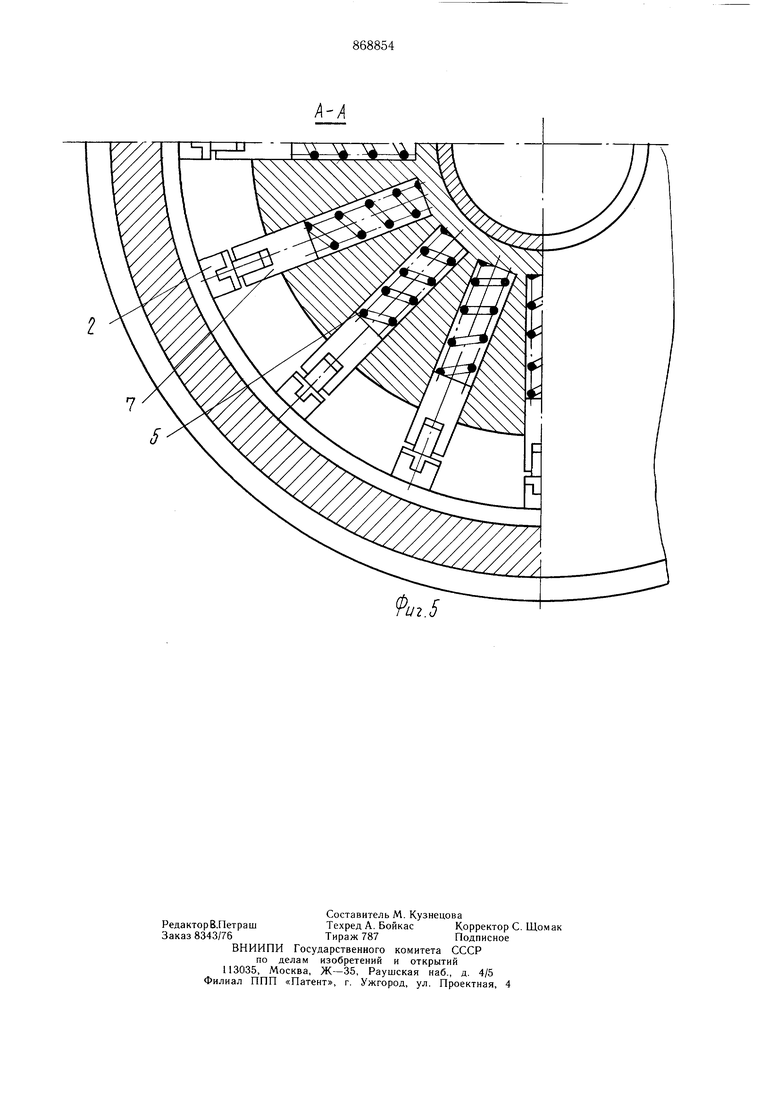
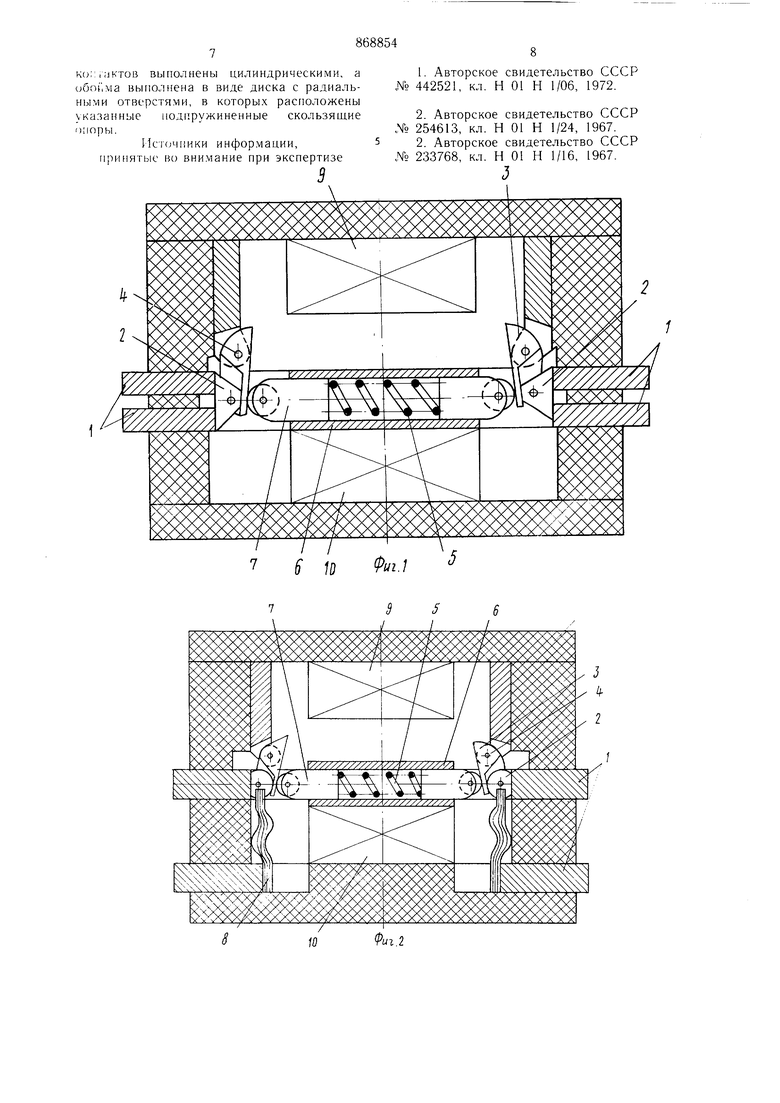
Изобретение относится к сильноточной коммутирующей аппаратуре с большим быстродействием и может быть использовано, главным образом, в системах питания импульсных электрофизических установок, преимущественно во включающих аппаратах. Известен сильноточный коммутационный аппарат, который содержит неподвижные подпружиненные контакты клинового и пальцевого типа и подвижный контакт с приводом а применяется для коммутации токов большой амплитуды, преимущественно в выключающих аппаратах 1. Недостатком аппаратов с такой контактной системой является слабая механическая устойчивость при больших скоростях включения. Поэтому они используются, главным образом, для выключения тока. Известен сильноточный коммутационный аппарат с контактной системой с двумя неподвижными контактами, выполненными с подпружиненными контактами розеточного типа, и подвижным контактом с приводом 2. В этой конструкции подвижный цилиндрический контакт соприкасается постоянно с одним розеточным контактом, а при срабатывании контактной системы коммутирует со вторым розеточным контактом. Теплоотвод от подвижного контакта в подобной системе затруднен из-за наличия двух систем гибких связей и большого количества контактных соединений. В связи с этим аппараты с контактной системой такого типа получаются громоздкими, имеют небольшой ресурс работы при включениях тока и большое время срабатывания. Наиболее близким к предлагаемому является сильноточный коммутационный аппарат, содержащий группы неподвижных контактов и подвижные контакты с индукционно-динамическим приводом 3. Подвижные контакты выполнены роликового типа. Возможность хорошего теплоотвода от мест контакта позволяет выполнить подвижные контакты сравнительно меньшего веса. Вес же подвижной части аппарата с подобной контактной системой значителен в связи с необходимостью крепления на ней подпружиненных оправок с контактными роликами, испытывающих большие динамические нагрузки, а также из-за систем демпфирования и фиксации. Таким образом, недостатками известной контактной системы являются сложность конструкции, большие динамические нагрузки на неподвижные части, что обуславливает сравнительно небольшой ресурс работы и большое время срабатывания. Цель изобретения - увеличение ресурса работы и уменьшение времени срабатывания и веса аппарата. Поставленная цель достигается тем, что в сильноточном коммутируюш,ем аппарате, содержаш.ем группы неподвижных контактов и подвижные контакты с индукционнодинамическим приводом, подвижные контакты закреплены на дополнительно введенных траверсах, каждая из которых установлена с возможностью вращения вокруг неподвижной оси и имеет два устойчивых положения, привод снабжен подвижной обоймой, в которой установлены скользящие опоры, подпружиненные, каждая, к соответствующей траверсе. При нахождении обоймы в одном определенном из двух крайних устойчивых положений, траверсы повернуты таким образом, что подвижные контакты прижаты к неподвижным контактам силой находящейся в обойме пружин. При расположении обоймы во втором крайнем положении, траверсы силой пружин повернуты таким образом, что подвижные контакты отведены от неподвижных на расстояние, обеспечивающее электрическую прочность. Таким образом, пружина, расположенная в обойме, выполняет несколько функций: в начале движения, до достижения скользящими опорами пружины положения над ося.ми вращения траверс, пружина демпфирует движение обоймы, преобразуя ее кинетическую энергию в потенциальную энергию сжатия пружины. После достижения обоймой с пружиной положения, при котором скользящие опоры пружины переходят по поверхностям траверс за их оси вращения, благодаря силе сжатия пружины, происходит вращение траверс вместе с подвижными контактами до замыкания последними контактных поверхностей не- подвижных контактов или до полного размыкания контактной системы. Пружина фиксирует в этом положении траверсы с подвижными контактами, а благодаря углу наклона поверхностей траверс пружина с помощью- скользящих опор заставляет двигаться обойму до упора и выполняет роль защелки, Кроме того, для уменьщения переходкого контактного сопротивления каждый из55 подвижных контактов соединен с одним из неподвижных контактов соответствующей группы дополнительно введенным гибким токопроводом. Подобная контактная система имеет один контактный переход, а контактная система с мостиковым контактом - два. Причем в случае с мостиковым контактом касание подвижного контакта контактной поверхности одного неподвижного контакта осуш,ествляется в двух точках, а другого - в одной. Благодаря силе нажатия происходит деформация контактов в точках касания и площадь контакта несколько увеличивается. Можно представить, что мостиковый контакт - разделенный на две части обычный контакт с включенны.ми последовательно обеими частями. Следовательно, сопротивление одного контактного перехода с той же силой нажатия приблизительно в 4 раза меньше, чем мостикового. Учитывая сопротивление гибкой связи и сопротивление контактного перехода от гибкой связи ко второму неподвижному контакту, переходное сопротивление такой контактной системы может быть уменьшено в 1,5 раза. С целью расширения функциональных возможностей коммутирующий аппарат выполнен с группами из трех неподвижных контактов, траверсы выполнены токопроводящими и осесимметричными, а ось траверсы связана со средним неподвижны.м контактом. Подвижные контакты, сов.мещенные с траверсой, с каждым из двух других неподвижных контактов контактируют при одном из двух крайних положений, обоймы. Контактная система, содержащая подвижные контакты, являющиеся и траверсами, позволяет расширить коммутационные возможности такого аппарата, в связи с введением дополнительного неподвижного контакта, что дает возможность проИЗВОДИТЬ переключение тока. Контактные поверхности неподвижных контактов выполнены цилиндрическими, а обойма выполнена в виде диска с глухи радиальными отверстиями, в которых расположены указанные подпружиненные скользящие опоры. В плоских контактных системах обычно несимметричное распределение токов между подвижными контактами, такая система занимает сравнительно большой объем и представляет трудности в обеспечении ее механической устойчивости. В цилиндрической контактной системе проще осуществлять необходимую механическую прочность, так как цилиндрическии электрод воспринимает все усилия и имеет гораздо большую механическую прочность, чем плоский. Цилиндрическая контактная система занимает меньший объем и в ней равномернее распределяются токи между подвижными контактами. Поэтому цилиндрическая контактная система при тех же габаритах позволяет выполнить аппарат с большим значением допустимой а.мплитуды тока и его длительности. На фиг. 1 изображен аппарат с двумя неподвижными контактами и с подвижными контактами мостикового типа, разрез; на фиг. 2 - аппарат с подвижными контактами, соединенными гибкими связями с одним из неподвижных контактов, разрез; на фиг. 3 - аппарат с подвижными контактами, являющимися и траверсами, и с тремя неподвижными контактами в группе, разрез; на фиг. 4 - аппарат с цилиндрическими контактными поверхностями неподвижных контактов, продольный разрез; на фиг. 5 - разрез А-А на фиг. 4. Сильноточный коммутирующий аппарат содержит группу неподвижных контактов 1, у контактных поверхностей которых расположены подвижные контакты 2, закрепленные, например, щарнирно в траверсах 3, имеющих возможность вращаться около неподвижных осей 4 и имеющих два устойчивых положения. Пружины 5 заключены в обойму 6, являющуюся подвижной частью индукционно-динамического привода, и опираются через скользящие опоры 7, например шарикоподшипники, на плоскости траверс 3. На фиг. 2 изображен аппарат, подвижные контакты 2 которого соединены гибкими связями 8 с одним из неподвижных контактов. На фиг. 3 показан аппарат с тремя неподвижными контактами 1. Подвижные контакты 2, имеющие стальные накладки 3, являющиеся одновременно траверсами, электрически и механически связаны цилиндрическими шарнирными соединениями со средним неподвижным контактом. На фиг. 4 и 5 - аппарат с неподвижными, расположенными в параллельных плоскостях контактами 1, выполненными с цилиндрическими поверхностями, расположенными в одной цилиндрической поверхности, причем пружины 5, расположенные в глухих отверстиях кольцевой обоймы 6, опираются через скользящие опоры 7 на траверсы 3. Устройство работает следующим образом. С помощью импульсных катущек 9 и 10 индукционно-динамического привода обойма 6 приводится в движение. В исходном положении, при разомкнутой контактной системе, обойма 6 находится, например, у катущки 9. Пружины 5 воздействуют на свободные от подвижных контактов поверхности траверс. Подвижные контакты отстоят на изоляционном расстоянии от контактных поверхностей неподвижных контактов. По команде на замыкание в катушку 9 подается импульс тока. Под действием индукционно-динамических сил обойма 6 приводится в движение. Скользящие опоры двигаются по плоскостям траверс, пружины 5 сжимаются. Когда скользящие опоры переходят уровень осей, на которых вращаются траверсы, происходит поворот последних под. действием энергии сжатых пружин. При касании подвижными контактами контактных поверхностей неподвижных контактов, они фиксируются пружинами в этом положении. Угол наклона траверс выбран таким, что под действием пружин обойма двигается до упора к катущке 10. В этом положении обоймы скользящие опоры пружин расположены на траверсах над серединой подвижных контактов или над серединой зазора между средним и соответствующим крайним контактом (фиг. 3). Отключение контактной системы происходит аналогично включению после подачи импульса тока в катущку 10. С помощью предлагаемой системы увеличивается ресурс работы аппарата по сравнению с известным (например, ВО-15М) в 1,5 раза, что проверено на макете, включающем восемь подвижных контактов. Контактная система получается меньщего веса и более простой и облегченной конструкции. Благодаря малому весу подвижной части и связанной с этим возможности применения в аппарате с предлагаемой контактной системой индукционно-динамического привода со сравнительно малой запасаемой энергией время срабатывания макета оказывается равным 2-3 мс по сравнению с 30-50 мс для известного аппарата (ВО-15М ВО-ЗОМ, ВО-55М). Формула изобретения 1.Сильноточный коммутирующий аппарат, содержащий группы неподвижных контактов и подвижные контакты с индукционно-динамическим приводом, отличающийся тем, что, с целью увеличения ресурса работы, уменьшения времени срабатывания и веса аппарата, подвижные контакты закреплены на дополнительно введенных траверсах, каждая из которых установлена с возможностью вращения вокруг неподвижной оси и имеет два устойчивых положения, привод снабжен подвижной обоймой, в которой установлены скользящие опоры, подпружиненные, каждая, к соответствующей траверсе. 2.Аппарат по п. 1, отличающийся тем, что, с целью уменьшения переходного контактного сопротивления, каждый из подвижных контактов соединен с одним из неподвижных контактов соответствующей группы дополнительно введенным гибким токопроводом. 3.Аппарат по п. 1, отличающийся тем. что, с целью расширения функциональных возможностей, число неподвижных контактов в группе выбрано равным трем, кажая траверса выполнена токопроводящей и симметричной, а ось вращения каждой траверсы связана со средним неподвижным конактом группы. 4.Аппарат по п. I, отличающийся тем, то контактные поверхности неподвижных К(Х;.актов выполнены цилиндрическими, а обоГ,ма выполнена в виде диска с радиальными отверстями, в которых расположены указанные подпружиненные скользящие )11ОрЫ. 11ст(Я1ники информации, принятые во внимание при экспертизе № Хо 5 № Фиг. 1.Авторское свидетельство СССР 442521, кл. Н 01 Н 1/06, 1972. 2.Авторское свидетельство СССР 254613, кл. Н 01 Н 1/24, 1967. 2. Авторское свидетельство СССР 233768, кл. Н 01 Н 1/16, 1967.
