(54) ПРИВОД ШПИПДЕЛЕЙ ХЛОПКОУБОРОЧНОГО БАРАБАНА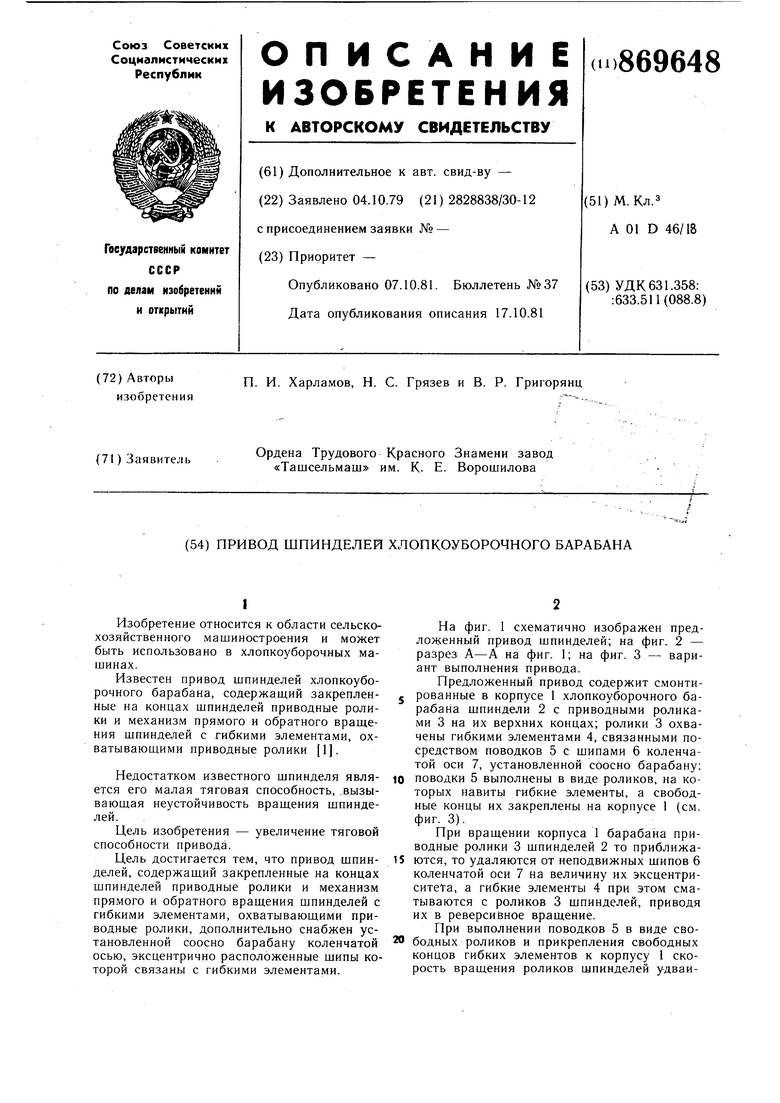
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод шпинделей хлопкоуборочного барабана | 1980 |
|
SU931129A1 |
| Стенд для испытания хлопкоуборочного барабана | 1987 |
|
SU1587371A1 |
| Шпиндельный барабан хлопкоуборочного аппарата | 1982 |
|
SU1020054A1 |
| Привод шпинделей хлопкоуборочного барабана | 1983 |
|
SU1118313A1 |
| БАРАБАН ВЕРТИКАЛЬНО-ШПИНДЕЛЬНОГО ХЛОПКОУБОРОЧНОГО АППАРАТА | 1972 |
|
SU351497A1 |
| Барабан хлопкоуборочного аппарата | 1981 |
|
SU1041062A1 |
| Шпиндельный барабан хлопкоуборочного аппарата | 1985 |
|
SU1349713A2 |
| Привод шпинделей хлопкоуборочного апппрата | 1976 |
|
SU631109A1 |
| Привод шпинделей хлопкоуборочного барабана | 1981 |
|
SU995713A1 |
| Привод шпинделей вертикальношпиндельного хлопкоуборочного барабана | 1979 |
|
SU873948A1 |
1
Изобретение относится к области сельскохозяйственного машиностроения и может быть использовано в хлопкоуборочных машинах.
Известен привод шпинделей хлопкоуборочного барабана, содержаш.ий закрепленные на концах шпинделей приводные ролики и механизм прямого и обратного вращения шпинделей с гибкими элементами, охватывающими приводные ролики 1.
Недостатком известного щпинделя является его малая тяговая способность, .вызывающая неустойчивость вращения щпинделей.
Цель изобретения - увеличение тяговой способности привода.
Цель достигается тем, что привод шпинделей, содержащий закрепленные на концах щпинделей приводные ролики и механизм прямого и обратного вращения шпинделей с гибкими элементами, охватывающими приводные ролики, дополнительно снабжен установленной соосно барабану коленчатой осью, эксцентрично расположенные щипы которой связаны с гибкими элементами.
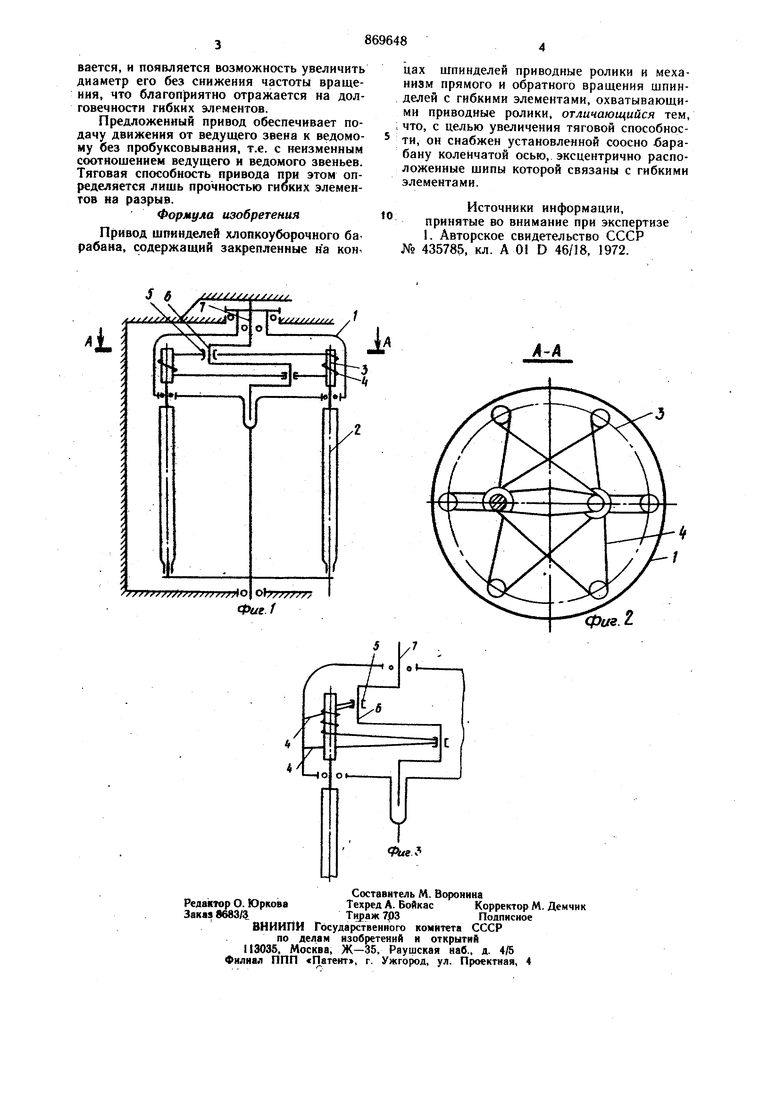
На фиг. 1 схематично изображен предложенный привод шпинделей; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - вариант выполнения привода.
Предложенный привод содержит смонтированные в корпусе 1 хлопкоуборочного барабана шпиндели 2 с приводными роликами 3 на их верхних концах; ролики 3 охвачены гибкими элементами 4, связанными посредством поводков 5 с шипами 6 коленчатой оси 7, установленной соосно барабану;
10 поводки 5 выполнены в виде роликов, на которых навиты гибкие элементы, а свободные концы их закреплены на корпусе 1 (см. фиг. 3).
При вращении корпуса 1 барабана приводные ролики 3 щпинделей 2 то приближаются, то удаляются от неподвижных щипов 6 коленчатой оси 7 на величину их эксцентриситета, а гибкие элементы 4 при этом сматываются с роликов 3 шпинделей, приводя их в реверсивное вращение.
При выполнении поводков 5 в виде свободных роликов и прикрепления свободных концов гибких элементов к корпусу I скорость вращения роликов шпинделей удваивается, и появляется возможность увеличить диаметр его без снижения частоты вращения, что благоприятно отражается на долговечности гибких элементов.
Предложенный привод обеспечивает подачу движения от ведущего звена к ведомому без пробуксовывания, т.е. с неизменным соотношением ведущего и ведомого звеньев. Тяговая способность привода при этом определяется лишь прочностью гибких элементов на разрыв.
Формула изобретения
Привод шпинделей хлопкоуборочного ба рабаиа, содержащий закрепленные на кон.
цах щпинделей приводные ролики и механизм прямого и обратного вращения шпинделей с гибкими элементами, охватывающими приводные ролики, отличающийся тем, что, с целью увеличения тяговой способности, он снабжен установленной соосно барабану коленчатой осью, эксцентрично расположенные щнпы которой связаны с гибкими элементами.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 435785, кл. А 01 D 46/18, 1972.
