(54) ВЫТРАВЛИВАНМЦЕЕ УСТРОЙСТВО ДЛЯ ШБКОЙ ТЯГИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Вытравливающее устройство для гибкой тяги | 1980 |
|
SU903288A2 |
| Вытравливающее устройство для гибкой тяги | 1981 |
|
SU1004249A2 |
| Вытравливающее устройство длягибКОй Тяги | 1979 |
|
SU796185A2 |
| Устройство контроля натяжения гибкой тяги при гидростатическом вытравливании из замкнутого объема | 1980 |
|
SU945685A1 |
| Система управления буксировкой судов | 1989 |
|
SU1678695A1 |
| Вытравливающее устройство для гиб-КОй Тяги | 1979 |
|
SU835938A2 |
| Вытравливающее устройство для гибкой тяги | 1977 |
|
SU647239A2 |
| Вытравливающее устройство для гибкой тяги | 1980 |
|
SU933628A2 |
| Устройство для управления движением ковша экскаватора-драглайна | 1986 |
|
SU1320352A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОВША ЭКСКАВАТОРА-ДРАГЛАЙНА | 2010 |
|
RU2443829C1 |
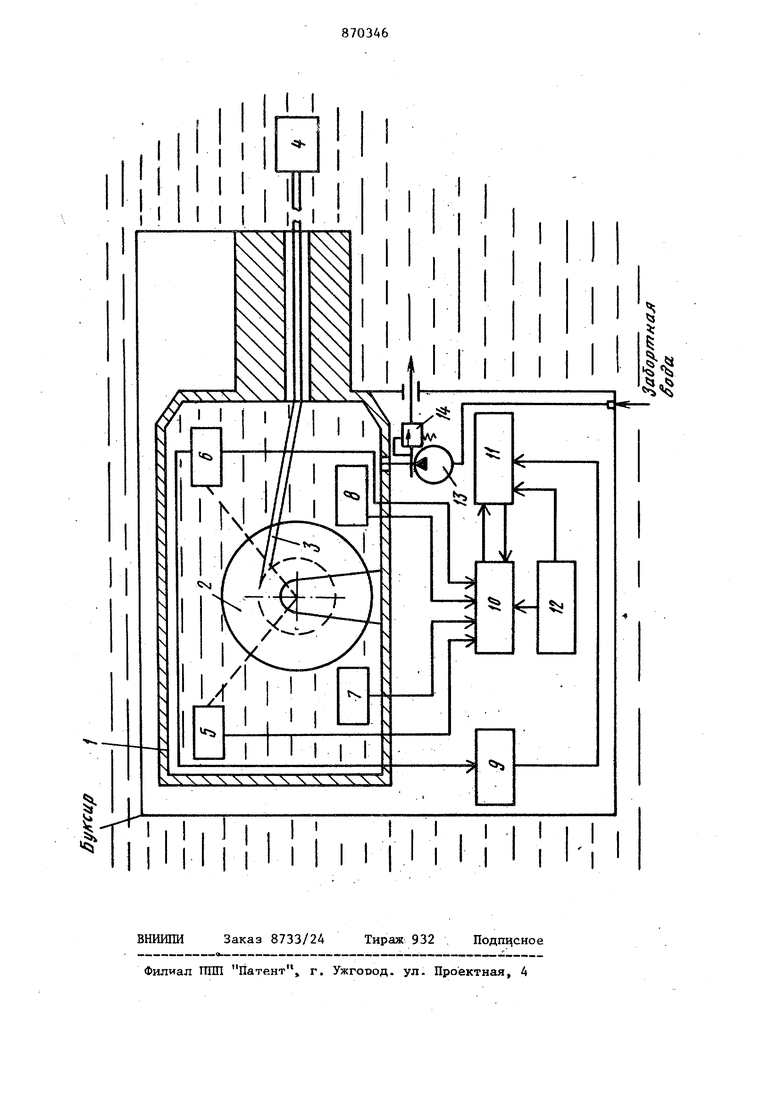
Изобретение относится к области подводных океанографических работ. По основному авт.св. № 419466 известно вытравливающее устройство для гибкой тяги, содержащее кожух с избыточным давлением в нем воды, насос, гидравлически связанньш с полостью кожуха, и создающим в нем избыточное давление воды, приче кожух выполнен герметичным с уплотнением, через которое проходит гибкая тяга, сматывающаяся с барабана лебедки под действием избыточного давления воды, а барабан лебедки устан влен внутри герметичного ко- жуха D. Недостатком такого устройства является то, что устройство не обес чивает автоматически циклический режим работы травить-выбирать, который является основным режимом работы устройства, многократным и занимает по своей совокупности значи тельно большее время, чем все остал ные режимы устройства вместе взятые. Кроме того, в устройстве не предусмотрен автоматический контроль режимов работы устройства. Целью изобретения является обеспечение автоматизированной работы в цик личном режиме травигь-выбирать и повышение надежности. Цель достигается тем, что оно снабжено датчиками оборотов и. угловой скорости лебедки, перепада давления воды, слабины натяжения гибкой тяги, установленными в герметичном корпусе, программным блоком, блоком индикации и контроля, формирователем сигиалА управления приводом лебедки, задатчиком режимов работы лебедки, установленными за пределами герметичного корпуса, причем перечисленные датчики своими выходами электрически подклю- . чены к входам блока индикации и контроля, кроме того, датчик оборотов лебедки подключен своим.вторым выходом к входу программного блока, выходы программного блока, блока индикации и контроля и задатчик режимов работы подключены к входам формирователя сигнала управления приводом лебедки, а второй выход задатчика режимов работы лебедки подключен к входу блока индикации и контроля, один из входов которого подключен к выходу формирователя сигнала управления приводом лебедки. На чертеже схематично изображено устройство, общий вид. Устройство содержит герметичный кожух 1, в котором размещается бара- бан 2 с гибкой тягой 3, на конце .которой закреплен .буксируемый объект 4 с измерительной аппаратурой В герметичном кожухе 1 также расположены датчик 5 угловой скорости лебедки, датчик 6 оборотов лебедки, датчик 7 перепада давления воды, датчик 8 слабины натяжения. Датчики 5 и 6 своими входами кинематически связаны с барабаном лебедки 2, Кроме того, датчик 6 оборотов лебедки своим выходом электрически соединен с входом программного блока 9. Все перечисленные датчики 5,6,7,8 своими выходами-элек рически соединены с входами блока 10 индикации и контроля. Программный блок 9 электрически соединен сйоим выходом с одним из входов формирователя 11 сигнала управления приводом лебедки. Формирователь J1 своими входом и выходом электрически соединен также с входом и выходом блока 10 индикаци и контроля и своим другим входом с выходом задатчика 12 режимов работ и служит для управления реверсом и скоростью лебедки. Задатчик 12 режимов работы лебедки своим выходом ; электрически соединен также с блоком 10 индикации и контроля и предназначен для задания режима работы и скорости лебедки. Насос 13 гидравлическ связан с герметичным кожухом 1 и пре дохранительным клапаном 14. Насос 13 служит для создания избыточного давл ния воды в кожухе 1, а клапан 14 для ограничения давления в Гидросистеме. Устройство работает;следующим образом. В первоначальный момент времени задатчиком 12 режимов работы лебедки задается режим постановки буксируемо го объекта 4 в исходное положение на определенном расстоянии от буксир При этом сигнал задатчика 12 режима 64 работы лебедки подается на формирователь 11 сигнала управления приводом лебедки, по сигналу с которого растормаживается и включается насос 13. После достижения избыточного давления в герметичном кожухе 1 под действием выталкивающей силы буксируемый объект 4 выходит из гёрметич- ного кожуха 1. При этом величина избыточного давления не должна превьшать определенной величины, чтобы не произошел обрыв буксируемого объекта 4 от гибкой тяги 3. Контроль за давлением в герметичном кожухе, 1 осуществляется датчиком 7. При повьшенных значениях давления сигнал датчика 7 поступает в блок 10 индикации и контроля, с выхода которого поступает в формирователь 11, который отключает насос 13. После выхода бзгксируемого объекта 4 из кожуха 1 в заданное положение относительно буксира задатчиком 12 режимов работы через формирователь 11 задается режим циклического травления-выбирания. При этом лебедка вращается в направлении травить со скоростью, несколько большей скорости буксира, и в результате принудительного травления гибкой тяги 3 происходит зависание буксируемого объекта, во время которого работает измерительная аппаратура, ycтaнoвлeIfнaя на нем. Скорость вращения лебедки задается уставками задатчика 12. Скорость вращеиия лебедки контролируется с. помощью датчика 5, В формирователе 11 сигнала управления приводом лебедки происходит сравнение ,сигнала уставки и датчика скорости и вырабатывается сигнал управления скоростью лебедки. Также при вращении лебедки 2 приходит в действие датчик 6 оборотов, электрически связанный с программным блоком 9. Программный блок производит измерение дпииы вытравлеииой гибкой тяги и в соответствии с заданиыми длинами тяги вьвдает сигнал в формирователь 11 иа реверсироваиие-выбирание, чтобы не произошло обрыва заделки гибкой тяги в барабане лебедки 2. Цосле выборки гибкой тяги до исходного положения из .программного блока вновь поступает команда в фор.мирователь 11 на травление и т.д. В режиме цикличного принудительного травления происходит постоянный контроль за перепадом давления воды в кожухе 1 датчиком 7 перепада и за натяжением гибкой тяги датчиком 8 слабины натяжения. При недостаточном перепаде давления сигнал с датчика 7 поступает в блок 10, с выхода которого поступает в формирователь 11, по сигналу с которого лебедка затормаживается и принудительное вытравливание прекращается в целях предотвращения возникновения бухтины гибкой тяги. Если в процессе травления возникает ослабление натяжения гибкой тяги, то сигнал датчика слабины натяжения 8 поступает в блок 10, затем в формирователь 11, по сигналу с которого также происходит от;тановка лебедки с последующей выборкой для ликвидации возможной бухтины. Окончательная уборка буксируемого объекта 4 задается сигналом с задатчика 12 режимов рабо.ты, которьй поступает в формирователь 11. По сигналу с формирователя останавливается насос 13, происходит выбирание гибкой тяги и затормаживание лебедки, В процессе всей работы сигналы от датчиков 5,6,7,8 команды от задатчика 12 и сигналы об исполнении команд от формирователя 11 поступают в блок 10 индикации и контроля, что позволят ет осуществлять оперативный контроль за работой устройства. Предлагаемое техническое решение позволяет повысить эффективность устройства путем обеспечения его автоматиче кой работы в циклическом режиме травить-выбирать, а также обеспечением автоматического контроля режимов работы. Таким образом, повьш1ается эксплуатационная надежность устройства, так как деятельность человекаоператора по управлению устройстве значительно сокращается и сводится лишь к заданию режимов работы. Время И вероятность безотказной работы устройства возрастает. Срок службы и ресурс до заводского ремонта увеличивается. Формула изобретения Вытравливающее устройство для гибкой тяги по авт,св, № 419466, о тличающееся тем, что, с целью обеспечения автоматизированной работы в циклическом режиме травитьвыбирать и повышения надежности, оно снабжено датчиками оборотов и угловой скорости лебедки, перепада давления воды, слабины натяжения гибкой тяги, установленными в герметичном корпусе, программным блоком, блоком индикации и контроля, формирователем сигнала управления приводом лебедки, задатчиком режимов работы лебедки, установленными за пределами герметичного корпуса, причем перечисленные датчики своими выходами электрически подключены к входам блока индикации и контроля, кроме того, датчик оборотов лебедки подключен своим вторым выходом к входу программного блока, выходы программного блока, блока индикации и контроля и задатчик режимов работы подключены к входам формирователя сигнала управления приводом лебедки, а второй выход задатчика режимов работы подключен к входу блока индикации и онтроля, один из входов которого подключеи к выходу формирователя сигнала ущзавления приводом лебедки. Источники информации, принятые во внимание при экспертизе i. Авторское свидетельство СССР 419466, кл, В 66D 1/08, 29,03,71 (прототип).
